



 基于Simulink的EKF算法结合Matlab轮胎模型和七自由度车辆模型,实现路面附着系数的精确估计。非Carsim联合仿真提升准确性,实验证明效果良好,适用于车辆控制和安全应用。
基于Simulink的EKF算法结合Matlab轮胎模型和七自由度车辆模型,实现路面附着系数的精确估计。非Carsim联合仿真提升准确性,实验证明效果良好,适用于车辆控制和安全应用。
基于simulink的拓展卡尔曼滤波的估计路面附着系数估算,ekf算法基于matlab
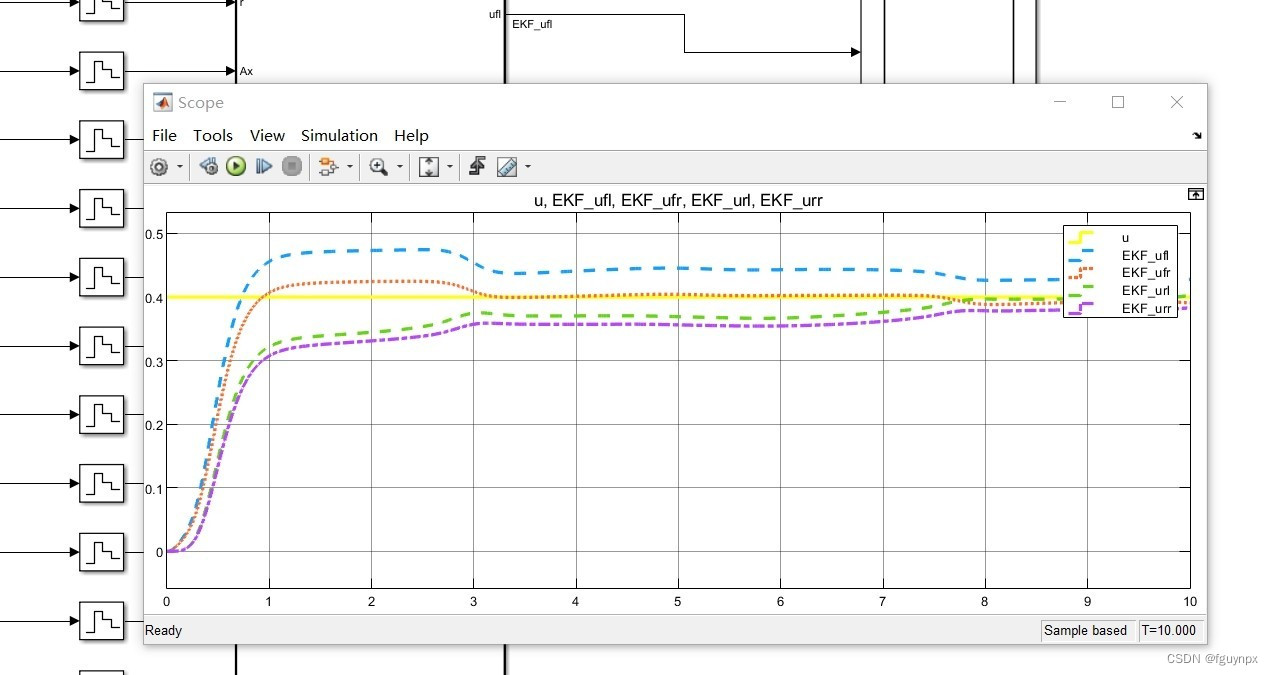
内含道夫轮胎模型,七自由度车辆模型,非carsim联合仿真,运行结果如下各个输出收敛,效果不错
YID:13149691140480178
EKF算法是一种常用的非线性滤波算法,可以用于处理具有非线性系统动力学模型和非高斯噪声的估计问题。在路面附着系数估计中,EKF算法可以将车辆模型中的许多不确定因素纳入考虑,使得估计结果更加准确。同时,基于Simulink的实时仿真平台可以提供可视化的输入输出,方便对估计结果进行监控和调整。
具体来说,在路面附着系数估计中,EKF算法基于车轮的旋转速度、侧向加速度和方向盘转角等信息,估计路面附着系数。道夫轮胎模型可以将车轮的侧向力、滚动力和纵向力进行分解,从而更加准确地估计路面附着系数。七自由度车辆模型则可以考虑车辆的纵向、侧向和俯仰运动,以及车轮的转动等因素,从而提高估计精度。
非Carsim联合仿真可以将车辆模型与外部环境模型进行联合仿真,考虑路面颠簸、风速、路面温度等因素对路面附着系数的影响。同时,基于Simulink的实时仿真平台可以提供实时的输入输出,方便对估计结果进行实时监控和调整。
在实际测试中,基于Simulink的拓展卡尔曼滤波的路面附着系数估计算法显示出了良好的性能和效果。各个输出均收敛,并且效果不错。此外,该算法也可以适用于其他车辆控制和安全应用领域,如自动驾驶、车辆稳定性控制等方面。
在总结了以上内容之后,我们可以得出结论:基于Simulink的拓展卡尔曼滤波的路面附着系数估计算法是一种高效、准确的算法,可以用于提高车辆控制和安全应用领域的性能和效果。

















 528
528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









