



 本文介绍了使用大疆无人机进行倾斜摄影建模的技术,包括规划航线、飞行设置和软件操作,强调了倾斜摄影在获取地物完整信息和提高建模效率上的优势。同时,提到了Pix4Dcapture软件的使用步骤和注意事项,并推荐了如初三维重建平台作为高效便捷的建模解决方案。
本文介绍了使用大疆无人机进行倾斜摄影建模的技术,包括规划航线、飞行设置和软件操作,强调了倾斜摄影在获取地物完整信息和提高建模效率上的优势。同时,提到了Pix4Dcapture软件的使用步骤和注意事项,并推荐了如初三维重建平台作为高效便捷的建模解决方案。
倾斜摄影测量技术是国际测绘遥感领域近年发展起来的一项高新技术,以大范围、高精度、高清晰的方式全面感知复杂场景,通过高效的数据采集设备及专业的数据处理流程生成的数据成果直观反映地物的外观、位置、高度等属性,为真实效果和测绘级精度提供保证。同时有效提升模型的生产效率。三维建模在测绘行业、城市规划行业、旅游业、甚至电商业等的行业应用越来越广泛,越来越深入。
无人机航拍不再是大众陌生的话题,商场到处可见的DJI商店,各种厂商的无人机也是层出不穷,这将无人机倾斜数据建模推到了一个关键性的阶段。
倾斜摄影技术,通过在同一飞行平台上搭载多台传感器(目前常用的是五镜头相机)。同时从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息。垂直地面角度拍摄获取的是垂直向下的一组影像,称为正片,镜头朝向与地面成一定夹角拍摄获取的四组影像分别指向东南西北,称为斜片。 摄取范围如下图:

使用大疆无人机进行数据,可以用单镜头模拟多镜头成像,规划5条航线,分五次飞行采集数据。
在建立建筑物表面模型的过程中,下图可以看到,相比垂直影像,倾斜影像有着显著的优点,因为它能提供更好的视角去观察建筑物侧面,这一特点正好满足了建筑物表面纹理生成的需要。同一区域拍摄的垂直影像可被用来生成三维城市模型或是对生成的三维城市模型的改善。

刚接触的Pix4Dcapture飞控软件,跟飞友们分享一下,相互学习:
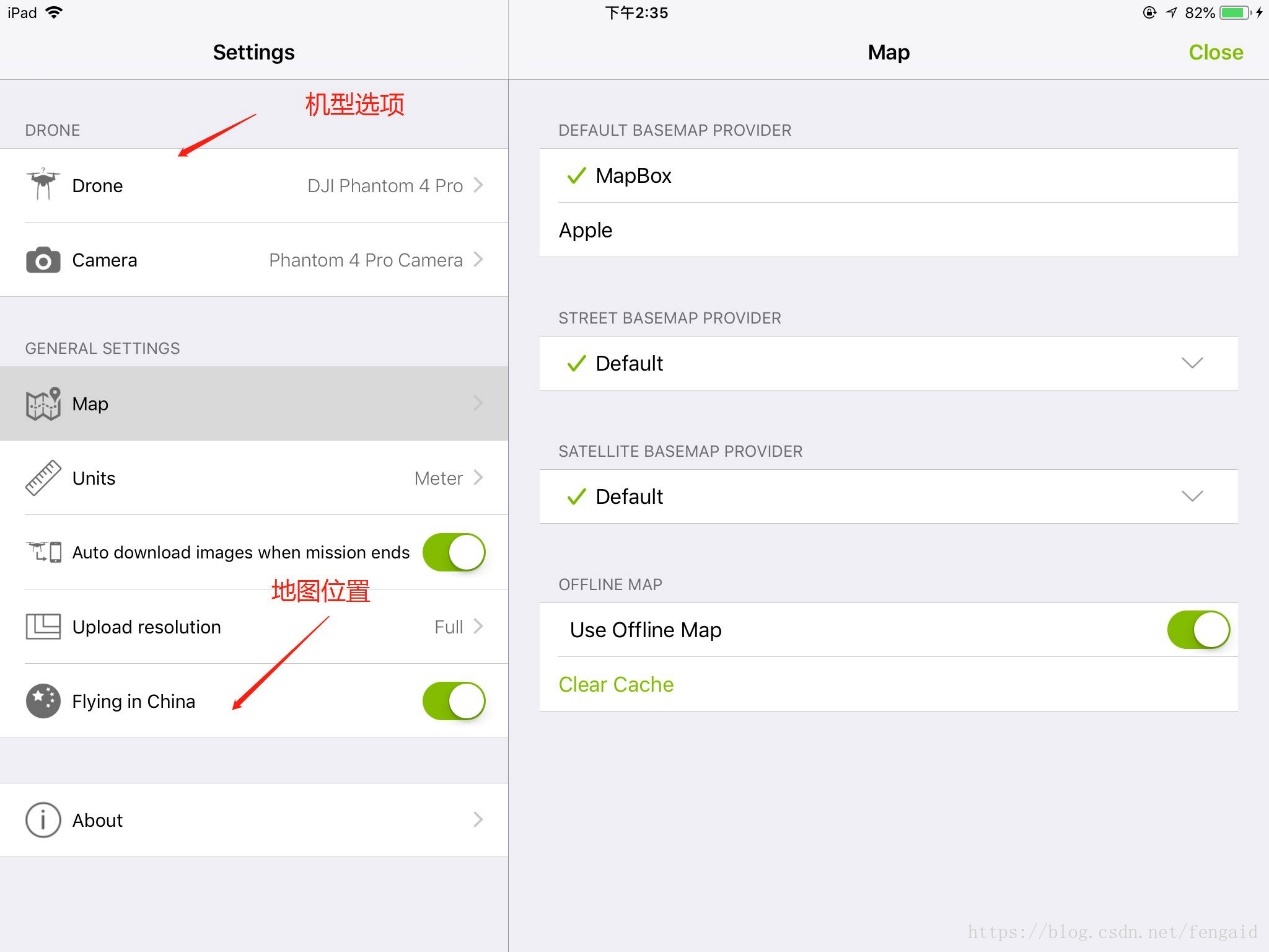
- 飞机基础选项
当我们打开软件时,会进入到开始界面,左上角是飞机型号选项和其他参数设置,右上交是推出选项。点击左上角,进行选择我们所用的飞机型号,与一些基础设置参数调选。
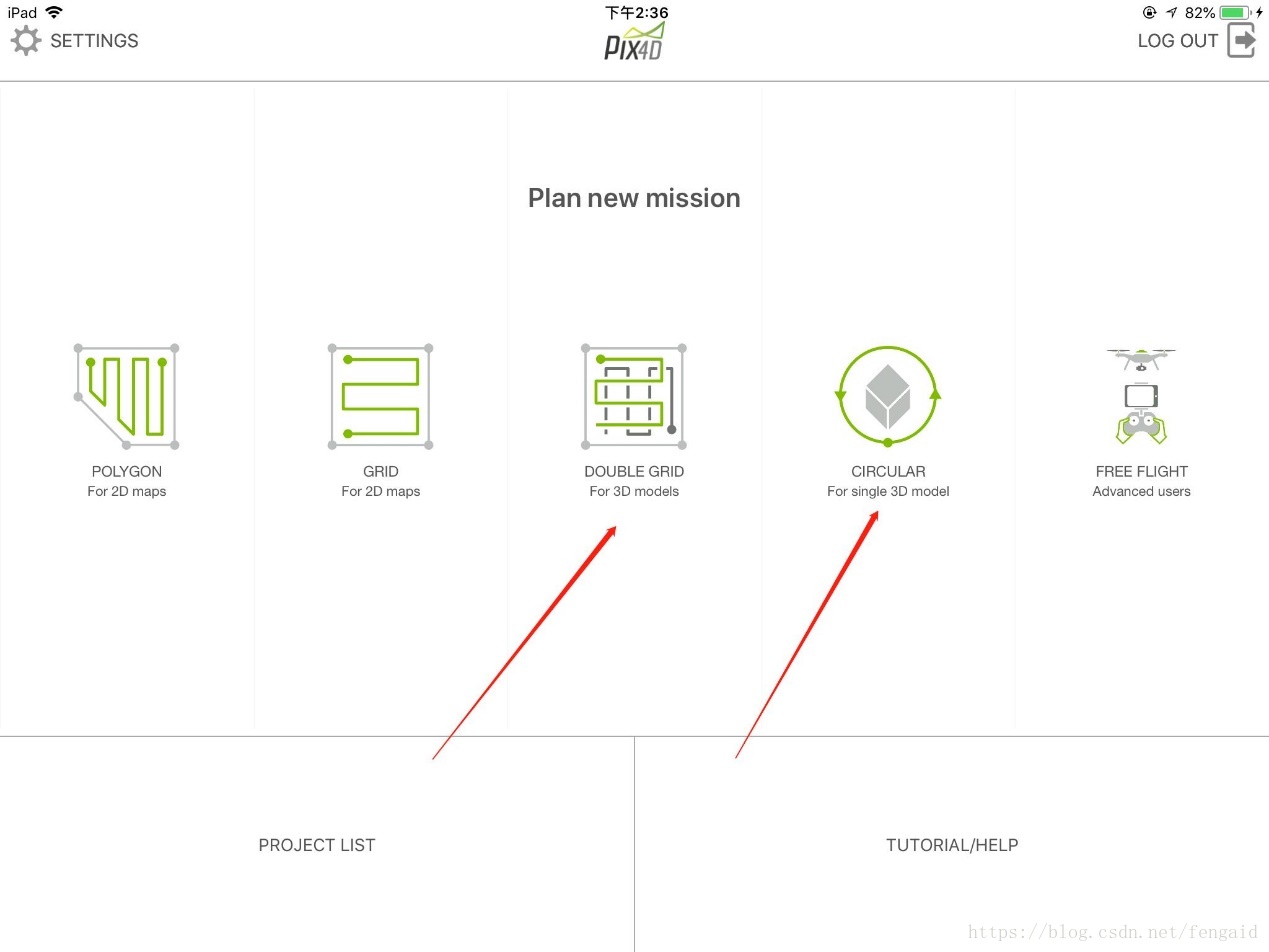
2、飞行选项
中间是飞行模式有五种,从左往右,第一个是多边形2D地图,第二个是网格2D地图,第三个是双网格3D模型,第四个是循环对于单3D模型,第五个是免费航班高级用户。左下角是项目列表选项,右下角是教程帮助选项。一般我们常用的是双网格3D模型和循环对于单3D模型。
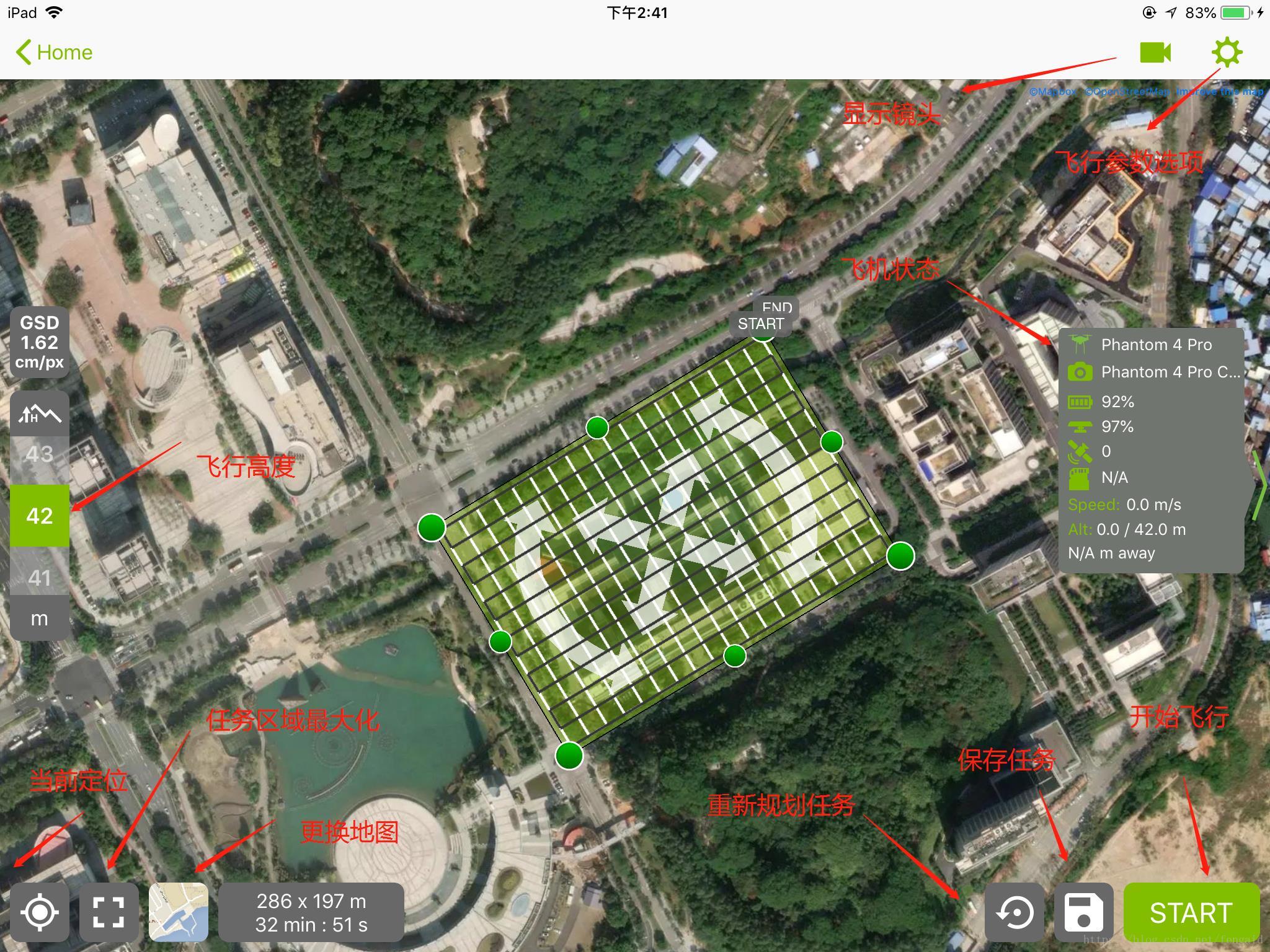
- 规划航线
一般我们选相机角度是45度,所以在画航线时,要超出所测的范围,这样才能把所测局域拍全。飞行高度要超过飞行区域内所有障碍物,以免飞行过程中撞高建筑物,造成飞机炸毁的后果,飞友特别注意。
- 飞行设置
- 一般相机角度我们选择是45度角
- 前重叠度和侧面重叠度设置70%(最好不要低于70%,高精度建模可以调到90%,飞行的时间会增加)
- 飞行速度一般选最大,它也不会飞到我们所测的飞速度。
- 查看中心看个人喜好是否要打开。
- 相机触发模式有安全模式和快速模式,一般我选快速模式(安全模式下,飞行器拍摄照片时会悬停,当图传丢失时,会继续执行拍照任务;快速模式下,飞行器边飞边拍摄照片,但是当图传丢失时,拍照任务会停止)。
- 白平衡可根据当地天气来调选。
- 忽略homepoint可以默认选择关闭(虽然软件提供忽略起飞点安全检查项设置,但是经实际测试,飞行器位置离测区中心点超过150米,还是无法起飞)。


- 当任务设置好后点击保存,开始执行任务
当我们点击开始执行任务是,飞机会弹出以下对话框,飞机进行自检:无人机连接情况、电池电量、GPS定位情况、摄像机状态、返航点位置、无人机是否靠近测区、遥控器档位设置等。
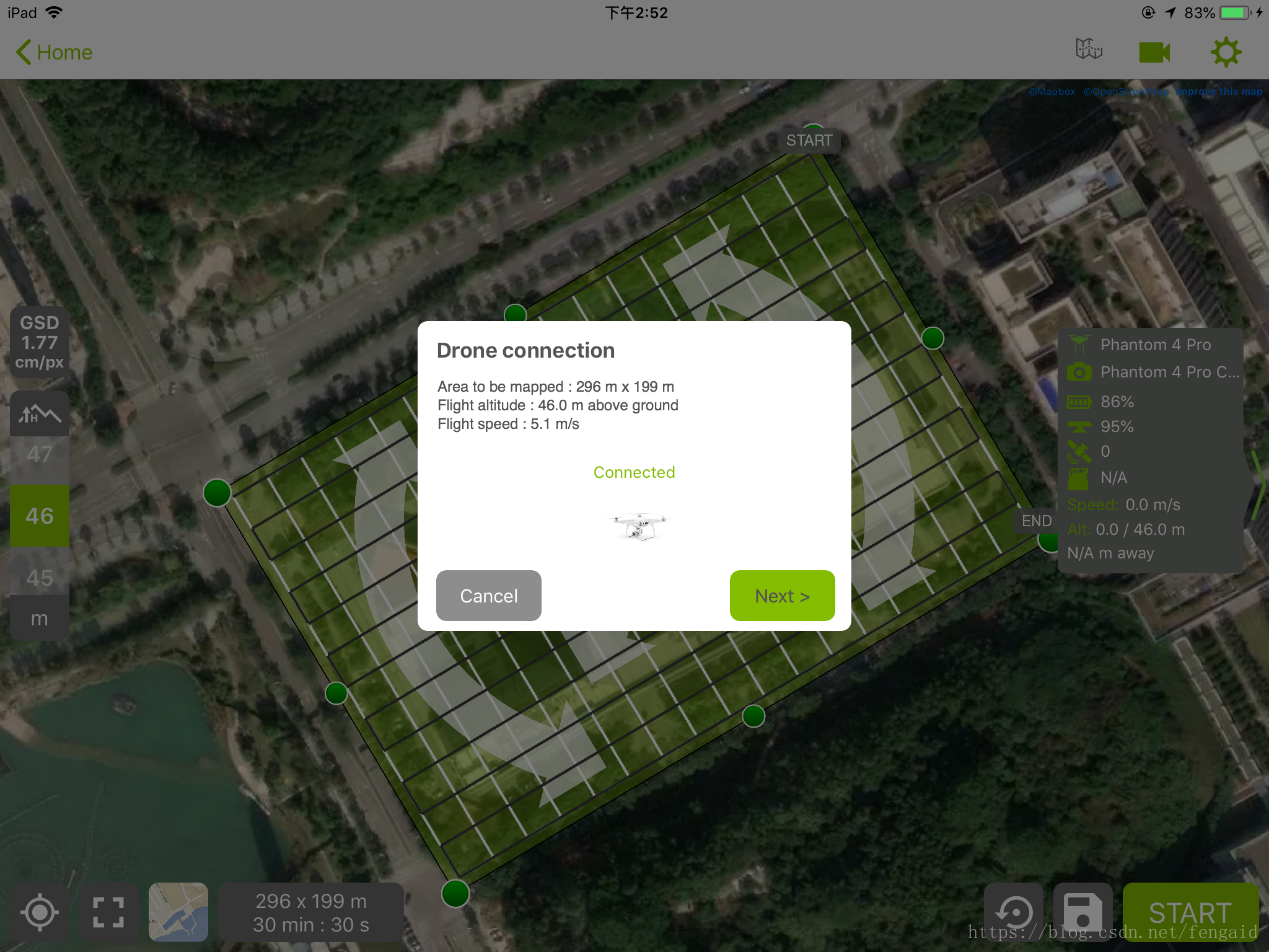
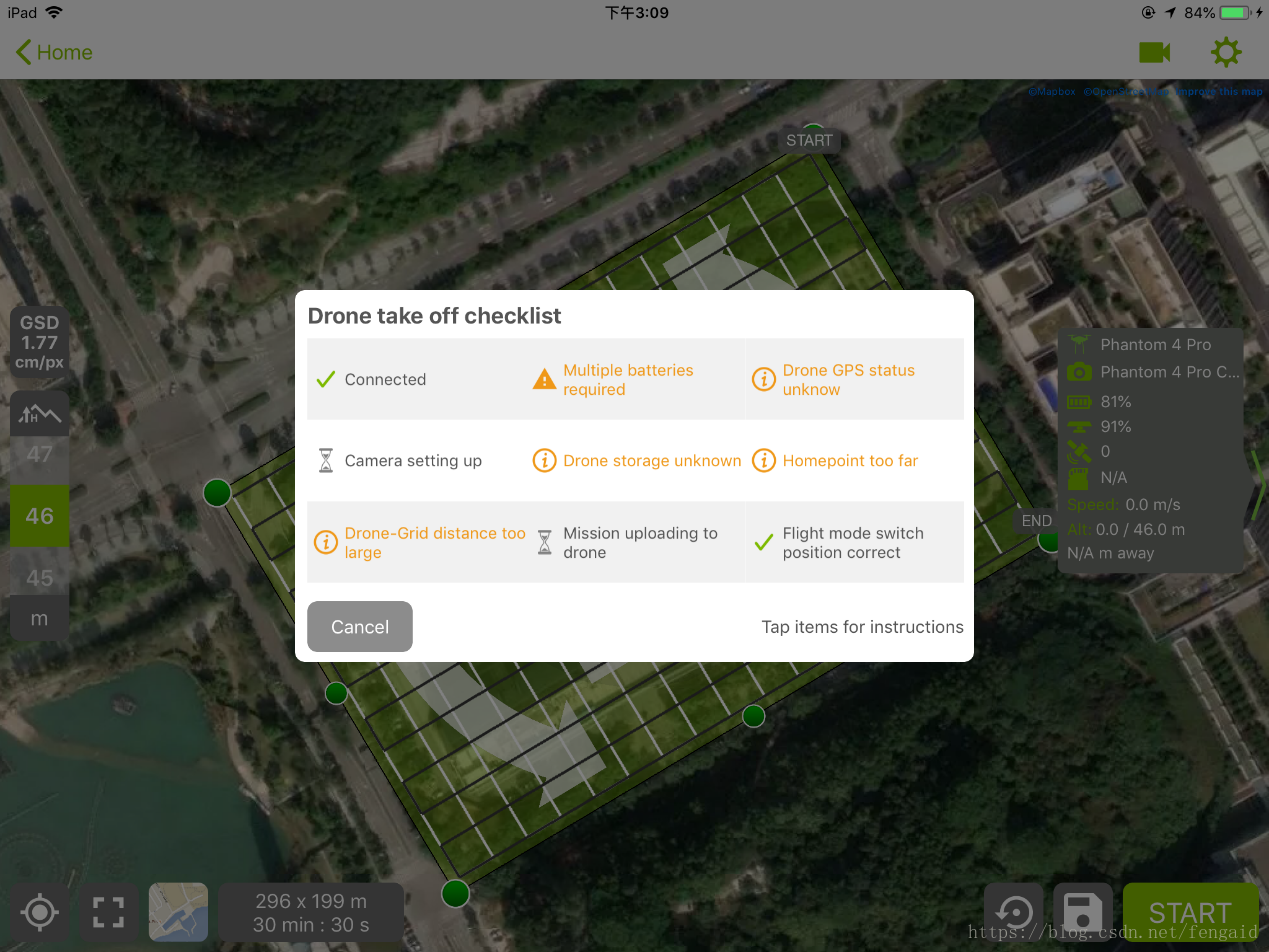
6、当飞机检查通过后,就可以点击开始飞行了。
注意事项:
(1)预计飞行时间功能:支持。
(2) 低电量报警功能:支持。
(3)低电量报警功能:支持。(低电量(30%)自动报警功能,和DJI GO4功能一样)
(4)自动返航功能:支持。(飞行过程中,APP会根据无人机与返航点的距离来计算返航电量,达到需要返航的电量时,会立即自动返航。)
(5) 断点续航功能:不支持。(特别注意任务所需要的时间,与飞机飞行的时间,看能不能控制飞行器在一个架次内完成两个互相垂直的格网航线,要不然徒劳无功)
(6) 失控返航功能:支持。
(7)其它安全策略:起飞点需处于测区中心位置(最远距离不超过150米),否则起飞前安全检查时会判定Home点过远无法起飞。
利用建模软件将照片建模,这里的照片不仅仅是通过无人机航拍的倾斜摄影数据,还可以是单反甚至是手机以一定重叠度环拍而来的,这些照片导入到建模软件中,通过计算机图形计算,结合pos信息空三处理,生成点云,点云构成格网,格网结合照片生成赋有纹理的三维模型。区域整体三维建模方法生产路线图:

行业里主流的有Smart3D、Photoscan、 Pix4D mapper等这几个建模软件也是各有优缺点,Photoscan比较轻量级,但是生成的模型纹理效果不是太理想,Smart3D生成的三维模型效果最为理想,人工修复工作量较低,但是软件比较复杂不易上手且价格较高。目前国内企业科创数字的“如初三维重建平台”,可以不需要有专业背景,测量设备、不需要手动贴图,让场景重建变得更简单,你只需要拍摄一些照片即可,上传到平台即可。
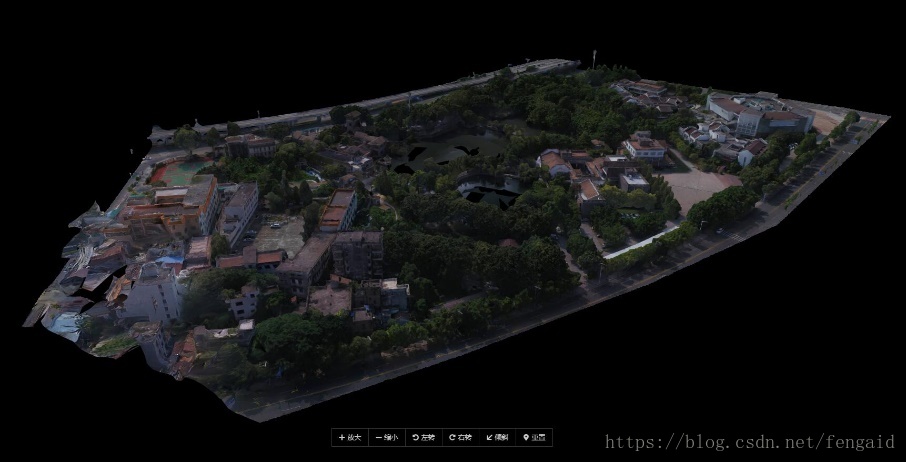
如初三维重建平台的研发而起无疑造福了大量的三维爱好者,使得三维重建的门槛大大降低,人人都可以成为三维模型的作者。下面我们来看怎么在“如初三维重建平台”制作模型。
总结
在如初三维建模平台上面注册免费账号上传照片,等待云端自动生成3D模型。Smart3D、Photoscan建模对电脑要求很高,费时费力,还不一定能成,直接免费云端建模效率超高,还不用浪费电费,推荐大家使用。其实我刚才看了个图文并茂的3D建模帖子,觉得其实没有必要,直接使用云端才好。



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









