 立创EDA空格键切换走线拐角技巧
立创EDA空格键切换走线拐角技巧




概述
在PCB上走线的过程中,我们可以按空格键来切换两点之间走线的拐角处,选择在上方拐角或者在下方拐角。下面进行具体介绍。
按空格键切换走线的角度
下面举个例子来进行说明。
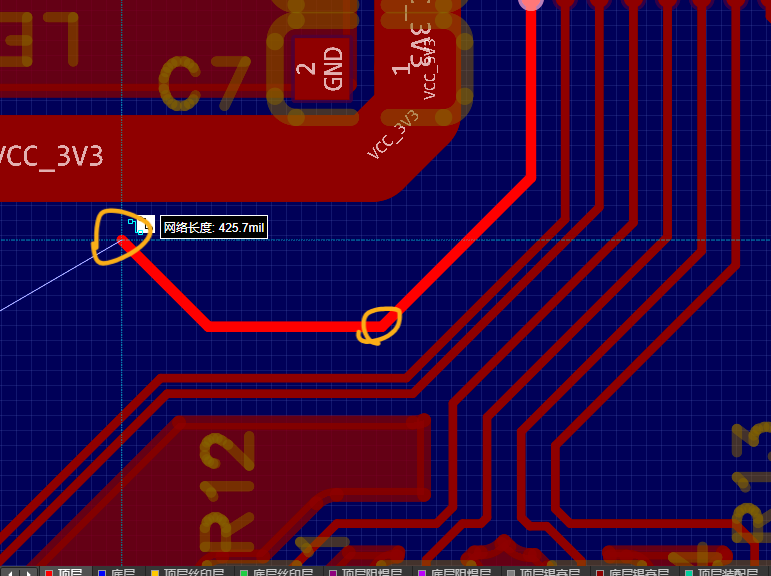
要在图中两点之间进行走线。用鼠标划出你想要的走线路径,然后停留在走线的终点处,先不要点下去。图中会显示出走线的预览路径。
图中走线的路径是:从起始点出发,先往左边走,然后往上一拐,走到了终点。
在这种状态下,我们按下空格键,可以在图中看到,走线的拐角处发生了改变。
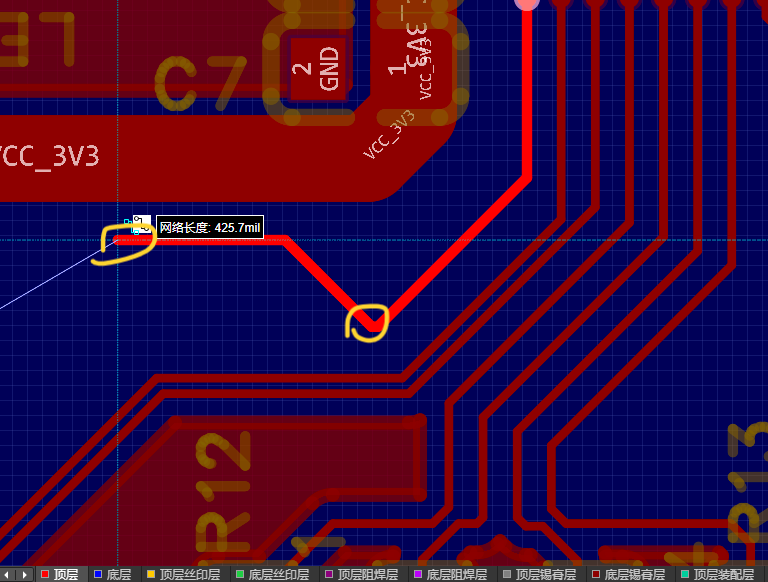
走线的路径变成了:从起始点出发,先往上面走,然后往左一拐,走到了终点。和之前的走线路径是中心对称的。
可以反复地按空格键,这样的话,走线拐角可以在上面两种模式中来回地切换。
选择自己想要的路径,然后点击鼠标左键,就能把当前的走线路径给确定下来了。
以上只是举了一个例子。对于各个方位两点之间的走线,按空格键,都能在“先上下”和“先左右”之间切换走线模式。
自己去操作一下,会有更直观的理解。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









