




 本文介绍了三维重建技术及其在自动驾驶、AR等领域的重要应用。文章提供了国内首个深度剖析OpenMVS原理的课程,通过逐行代码讲解帮助学员快速掌握三维重建的理论与实践,涵盖相机模型、多视图几何、点云处理、网格重建和纹理贴图等核心技能。课程适合有一定C++基础的学生和从业者,提供作业和奖学金激励,助力三维重建领域入门与提升。
本文介绍了三维重建技术及其在自动驾驶、AR等领域的重要应用。文章提供了国内首个深度剖析OpenMVS原理的课程,通过逐行代码讲解帮助学员快速掌握三维重建的理论与实践,涵盖相机模型、多视图几何、点云处理、网格重建和纹理贴图等核心技能。课程适合有一定C++基础的学生和从业者,提供作业和奖学金激励,助力三维重建领域入门与提升。
原文链接:赞!图像几何三维重建代码实战教程来啦!深度计算+点云处理+网格重建优化+纹理贴图!
前言
随着近几年机器人、自动驾驶、AR等技术的飞速发展,三维重建这个学术名词也逐渐出现在大众的视野中。那究竟什么是三维重建呢?
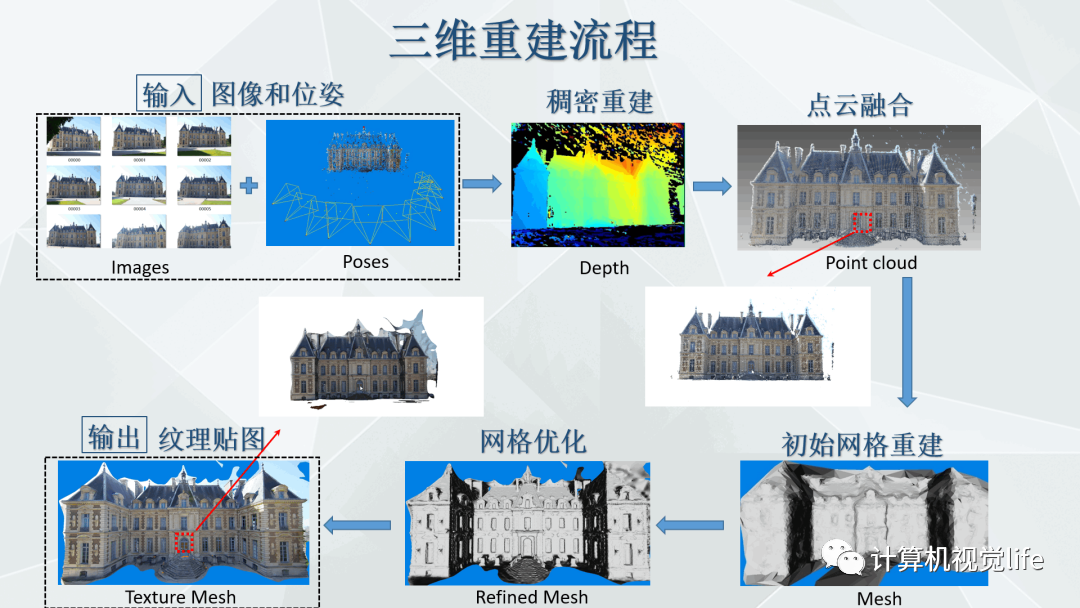
简单来说,三维重建是指用相机等传感器拍摄真实世界的物体、场景,并通过计算机视觉技术进行处理,从而得到物体的三维模型。如下所示。
涉及的主要技术有:多视图立体几何、深度图估计、点云处理、网格重建和优化、纹理贴图、马尔科夫随机场、图割等。
下图是图像三维重建的基本流程:
三维重建应用
三维重建是增强现实(AR)、混合现实(MR)、机器人导航、自动驾驶等领域的核心技术之一。本文列举几个典型的应用场景:
自动驾驶。构建高精地图,高精地图对于自动驾驶来说太重要了,没有的话相当于蒙着眼睛开车。
文物重建、 AR旅游。目前大家去很多博物馆或旅游景点其实都已经有了类似的产品。比如AR游西湖之类的。很有趣的应用!
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








