




 本文介绍了如何使用IAP15W4K61S4单片机控制舵机,详细讲解了舵机的基本原理、硬件设计和软件设计,包括PWM脉宽调制控制和定时器T0的使用,最终实现人形机器人摇头动作。
本文介绍了如何使用IAP15W4K61S4单片机控制舵机,详细讲解了舵机的基本原理、硬件设计和软件设计,包括PWM脉宽调制控制和定时器T0的使用,最终实现人形机器人摇头动作。
多自由度人形双足舞蹈机器人
——疯壳·机器人开发系列
舵机的基本控制
1 舵机简介
本章,我们将使用 IAP15W4K61S4 单片机控制舵机的转动。

图 1
一般来说,舵机由舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路组成。
它的输入线一共 3 条,电源线、地线和控制线。
舵机是通过 PWM 脉宽调节角度,周期为 20ms,占空比 0.5ms 到 2.5ms 的脉宽电平对应舵机 0 度到 180 度角度范围。因此,我们就可以通过 IAP15W4K61S4 单片机产生不同占空比的方波,来控制舵机轴的不同位置,从而控制舵机的转动。
2 硬件设计
由于单片机在实际中的输出电流很小,本次就使用了 74HC244 来增加输出电流。另外,机器人的头部舵机的信号线是通过 P27 与 74HC244 相连间接控制的。
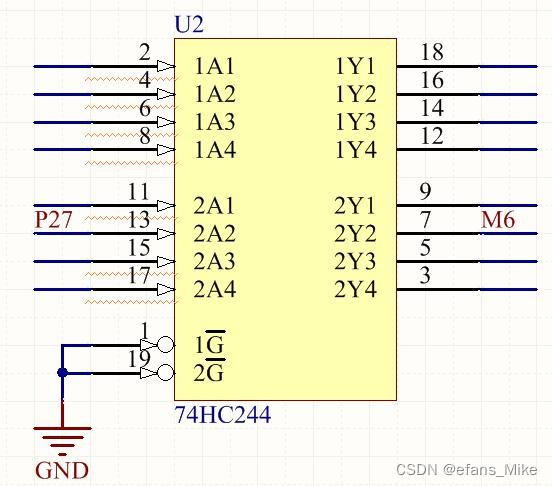
图 2
3软件设计
本次我们是通过定时器 T0 控制 IO 口输出高低电平的时间来输出 PWM。首先,我们介绍一下 IO 口以及定时器相关寄存器。
(1)数据寄存器 Px
Px 对应的输入输出数据,以 P0 为例,如下图所示:

图 3
(2)模式寄存器
每个引脚对应的两个模式寄存器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 691
691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









