 教育行业9学科大模型评测结果公布
教育行业9学科大模型评测结果公布





继续评测,本期安排上了应用于教育行业的大模型能力评测,涉及小学、初中、高中3个阶段9个学科,和高考答题的评测。同时,教育领域不同类型、不同阶段、不同科目的评测,都在爆肝输出中,敬请期待。
一、评测结论:
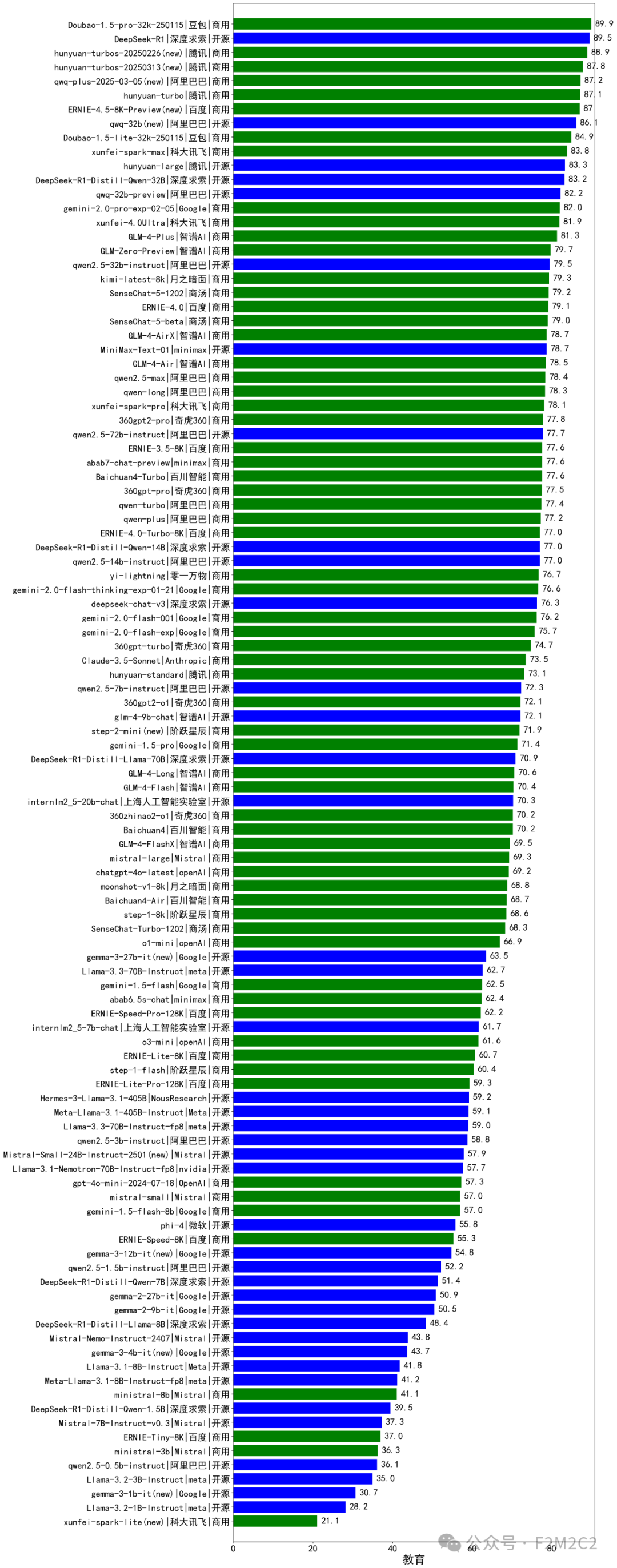
字节系豆包大模型得分第一!DeepSeek排名第二,腾讯系大模型和阿里系大模型包揽3-5名,DeepSeek是排名前5中唯一的开源模型。
二、评测维度:
针对教育行业的各阶段考试的选择题进行评测,囊括小学、初中、高中3个阶段,和高考试题的评测,细分维度为9个学科:语文、数学、英语、历史、地理、政治、物理、化学、生物。
各科目完整评测题集及结果详见:https://github.com/jeinlee1991/chinese-llm-benchmark
三、评测方法:
结合以上医疗类目考试的选择题,分别让各个大模型进行回答,根据结果进行打分,并统计每个模型的答题准确率。
*评测综合得分排名(图)|绿色(闭源),蓝色(开源)
*实测大模型列表和得分、排名:

完整评测题集及结果详见:https://github.com/jeinlee1991/chinese-llm-benchmark
大模型评测EasyLLM,目前已就DeepSeek和各个大模型的不同能力维度进行了综合评测(详情可回顾以下链接👇),接下来还会针对大模型当律师、医生、老师等各个岗位角色进行测评,看看谁是各个垂直领域的最强打工人!宝子们看好哪个大模型可以在哪些岗位胜任最强牛马?或者想评测大模型的哪方面能力?评论区留言,有求必测,一一公布结果!有评测样本、有图有真相!
往期文章
Llama/Qwen/DeepSeek开源之争——CLiB开源大模型排行榜03.04
那些免费的大模型API效果到底好不好?——CLiB大模型排行榜
关于大模型评测EasyLLM
-
最全——全球最全大模型产品评测平台,已囊括203个大模型
-
最新——月更各个大模型各项能力指标评测,输出排行榜
-
最方便——无需注册/梯子,国内外各个大模型可一键评测
-
结果可见——所有大模型评测的方法、题集、过程、得分结果,可见可追溯!
-
错题本——百万级大模型错题本
大模型评测EasyLLM目前已囊括187个大模型,覆盖chatgpt、gpt-4o、o3-mini、谷歌gemini、Claude3.5、智谱GLM-Zero、文心一言、qwen-max、百川、讯飞星火、商汤senseChat、minimax等商用模型, 以及DeepSeek-R1、deepseek-v3、qwen2.5、llama3.3、phi-4、glm4、书生internLM2.5等开源大模型。不仅提供能力评分排行榜,也提供所有模型的原始输出结果!
完整评测题集及结果详见:https://github.com/jeinlee1991/chinese-llm-benchmark


















 2288
2288

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









