 树莓派驱动步进电机实战
树莓派驱动步进电机实战




之前写过一篇驱动步进电机的文章,可以跟这篇参考着看。请戳这里!
一、硬件:
树莓派3B

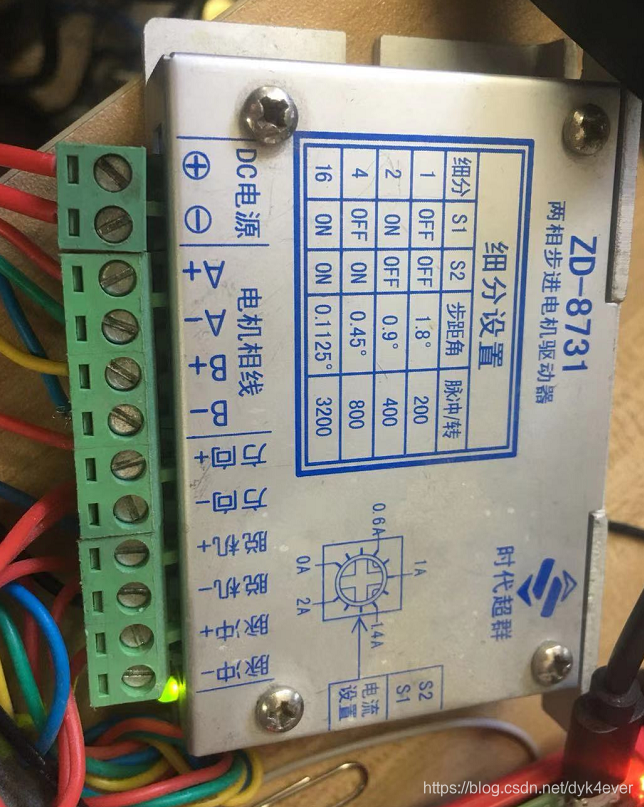
ZD-8731驱动器
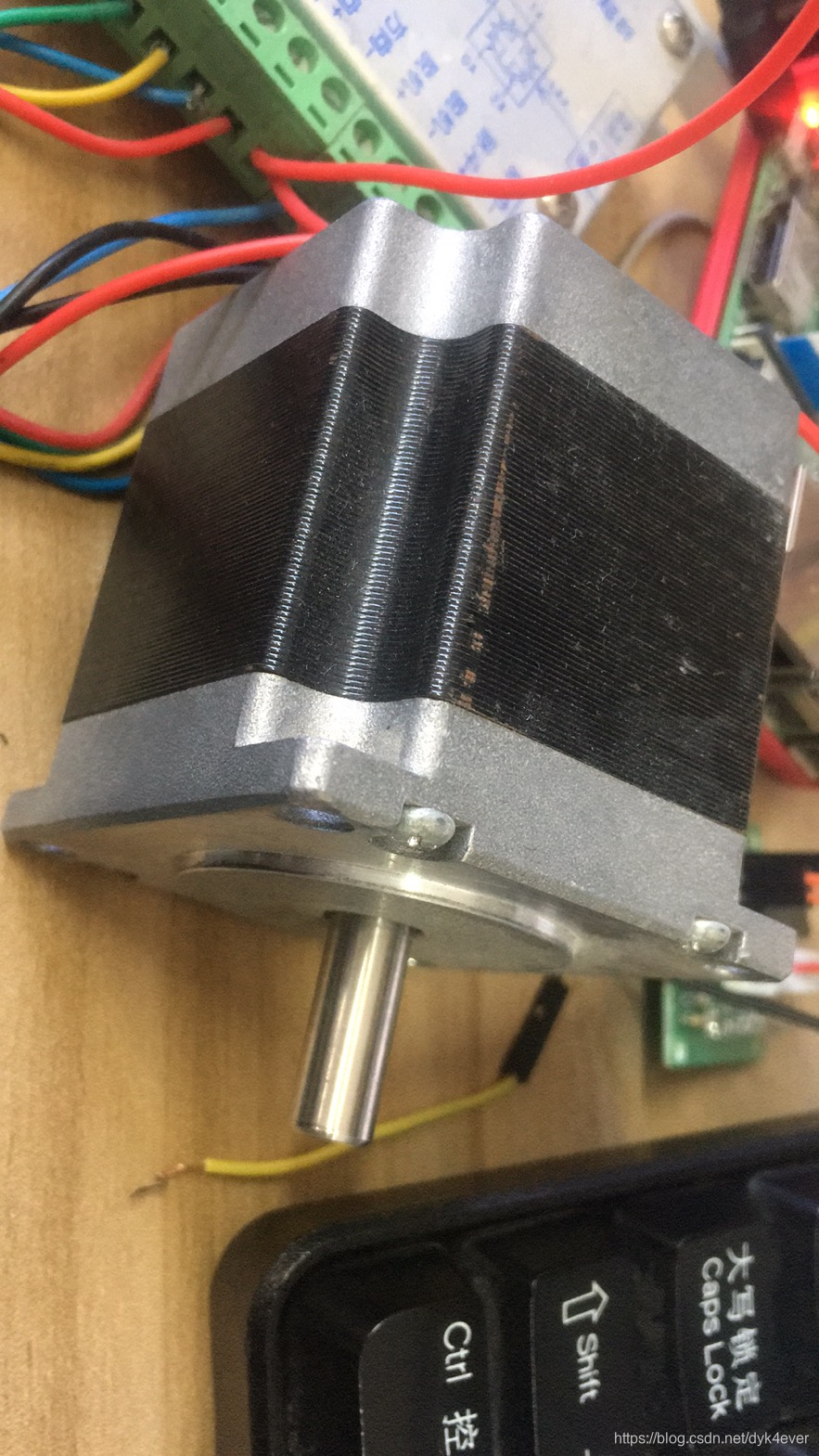
与驱动器配套的步进电机
电源
驱动器需要24V电源供电(用电很危险,请注意安全!)

二、驱动器的说明书
详细的说明书请戳这里!
2.1工作条件
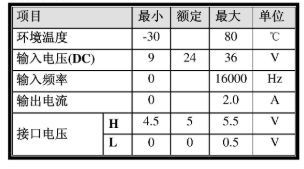
因为额定电压是24V,所以我们需要用到24V电源。而接口电压指的是脉冲、脱机和方向,额定5V。则可以直接接在树莓派的GPIO口上。
2.2接口定义
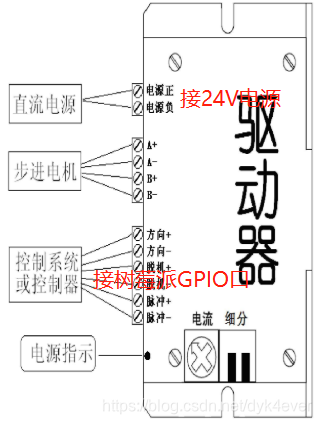
2.3接线
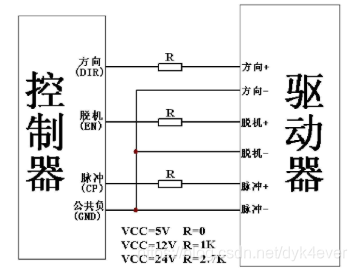
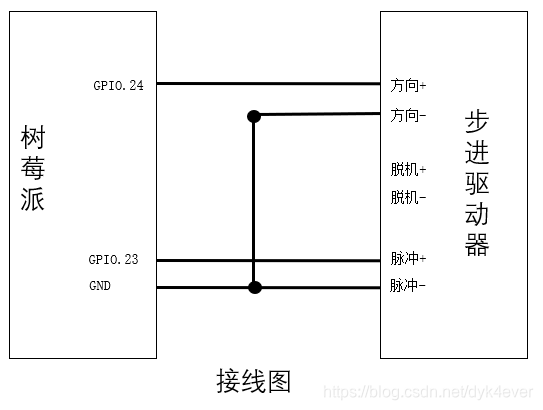
本次采用的是共阴极接法(公共地方式),可以采用共阳极接法,具体请参考说明书的指示。
2.4控制方式
脉冲+:有脉冲时工作,低电平有效;无脉冲时锁定电机并自动平流。
方向+:低电平输入或悬空时正转;高电平输入时反转。
脱机+:低电平输入或者悬空时正常工作;高电平时脱机。(本次没有用到脱机功能)
三、代码
接线完毕,进入树莓派python IDE写入代码,运行即可。
import RPi.GPIO as GPIO
import time
if __name__=='__main__':
pin_19=19 #GPIO口
pin_13=13
freq=100 #1-2000Hz
dc=0 #占空比 0-100
state=0 #正反转状态 1 或 0
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin_19,GPIO.OUT)
GPIO.setup(pin_13,GPIO.OUT)
pwm=GPIO.PWM(pin_13,freq)
pwm.start(dc)
GPIO.output(pin_13,state)
try:
while True:
freq=int(input("Please input the frequency of PWM(1-2000Hz):"))
pwm.ChangeFrequency(freq)
dc=int(input("Please input the duty cycle(0-100):"))
state=int(input("Please input the state of motor(1 or 0):"))
GPIO.output(pin_13,state)
time.sleep(1)
finally:
pwm.stop()
GPIO.cleanup()


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









