很多语现在还不方便说,到底是什么,你们随便猜猜吧。
点击浏览大图。

2007.07.27另注:
现在可以说了。
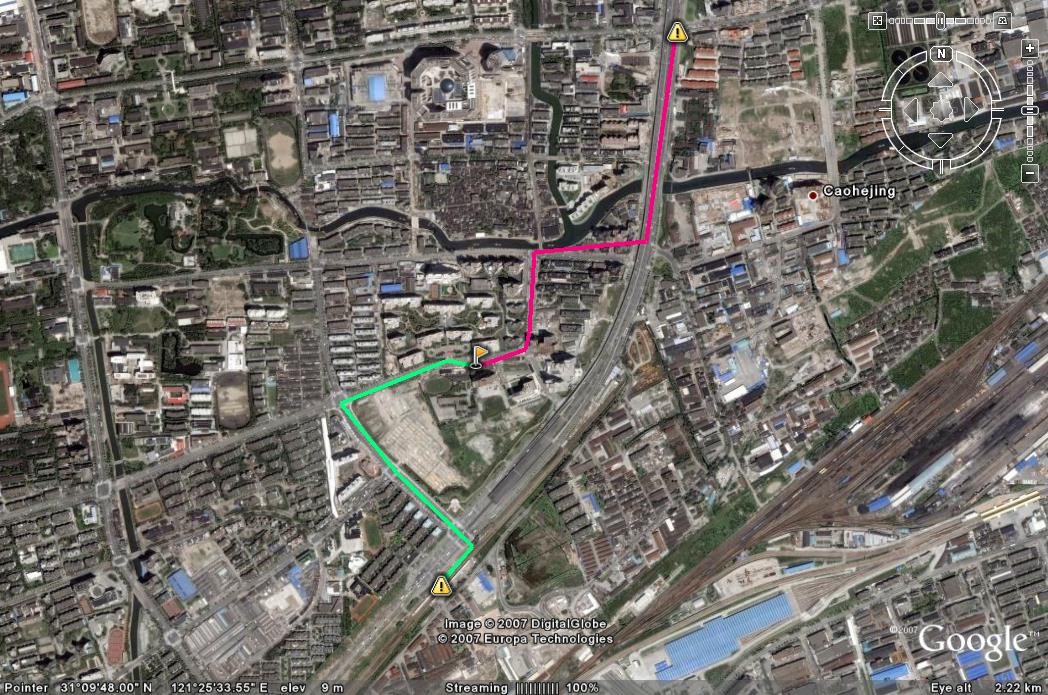
这个是我去上海激动面试前一天。在网上找的路线图。黄色的是地铁一号线的火车南站和漕宝路站。棋子是目的地。路线是用来测量距离的。
漕宝路站走过去1.12公里,南站站过去0.9公里。结果我选择的是火车南站的路线。整个过程,包括面试都很顺利。
以后就要和Jeffrey Zhao一起共事了。今天已经向部长提交的辞呈。下面估计1-2周内会做一些工作上的交接。8.10号之前可以到达新的岗位。新的开始,新的挑战,新的机遇。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言

























 835
835





