



广度优先搜索(bfs)广搜,又称宽度优先搜索,是一种搜索算法。
广搜它基于队列(queue)实现,我们用例题迷宫来讲
例题如下:
描述
当你站在一个迷宫里的时候,往往会被错综复杂的道路弄得失去方向感,如果你能得到迷宫地图,事情就会变得非常简单。
假设你已经得到了一个 n∗m 的迷宫的图纸,请你找出从起点到出口的最短路。
输入
第一行是两个整数 n 和 m,表示迷宫的行数和列数。
接下来n行,每行一个长为 m 的字符串,表示整个迷宫的布局。字符‘.’表示空地,‘#’表示墙,‘S’表示起点,‘T’表示出口。
输出
一个整数,即从起点到出口最少需要走的步数。
样例
输入数据 1
3 3
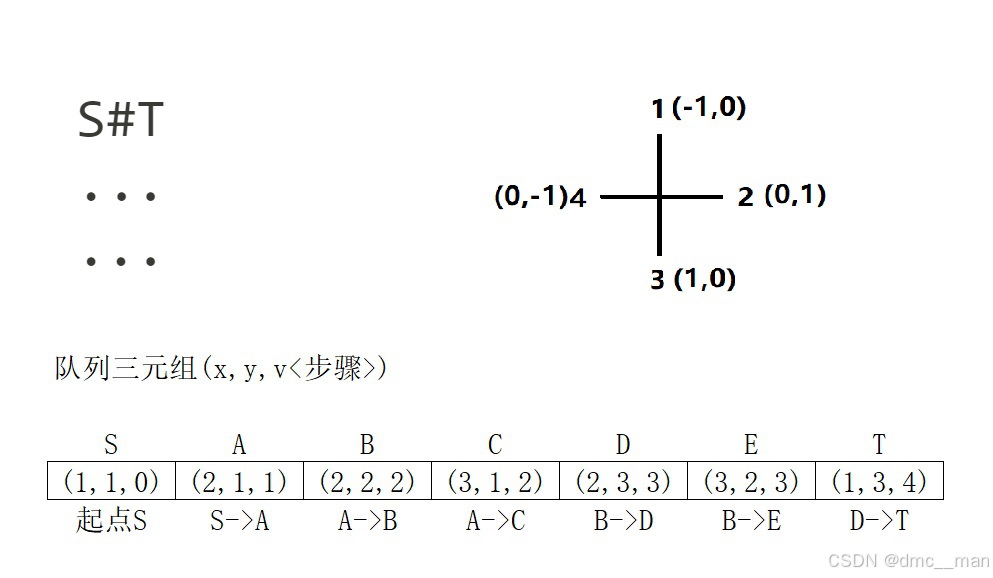
S#T
...
...
输出数据 1
4
样例解析
数据范围
1≤n,m≤100
分析如上图,接下来开始写代码
#include<bits/stdc++.h>
using namespace std;
const int N=110;
int sx,sy,ex,ey;//sx和sy是起点位置,ex和ey是终点位置
char mp[N][N];//地图
bool sg[N][N];//标记走过的地方与障碍
int mx[4]={1,-1,0,0};//图中有解释
int my[4]={0,0,1,-1};
int n,m;
struct NODE{
int x,y,step;//step表示步骤
};
int main()
{
scanf("%d%d",&n,&m);
for(int i=1;i<=n;i++){
for(int j=1;j<=m;j++){
cin>>mp[i][j];
if(mp[i][j]=='S'){
sx=i,sy=j;
sg[i][j]==true;//记住起点位置并标记
}
else if(mp[i][j]=='#') sg[i][j]=true;//标记障碍
else if(mp[i][j]=='T') ex=i,ey=j;//标记终点
}
}
queue<NODE>q;//图中
NODE t={sx,sy,0};//表示目前位置
q.push(t);//起点入队
while(!q.empty()){//栈非空则搜索
t=q.front();q.pop();
for(int i=0;i<4;i++){
int nx=t.x+mx[i];//t.x+mx[i]表示拓展结点位置
int ny=t.y+my[i];//同上
if(nx<1||nx>n||ny<1||ny>m||sg[nx][ny]) continue;
// 不能走的情况(障碍,走过的(sg),超出边界)
sg[nx][ny]=true;//走过了
if(nx==ex&&ny==ey){//到终点
printf("%d",t.step+1);
return 0;
}
q.push({nx,ny,t.step+1});//更新当前位置
}
}
printf("-1");//走不到输出-1
return 0;
}
通过这个题,我们可以总结出广搜原理如下:
1.广搜从起点开始,开始拓展节点。
2.每走一步,就不在走前一步的位置。
3.遇到障碍,超出边界的情况,就跳过这次拓展
4.拓展新的节点后,就在这次拓展的基础上继续拓展。
5.搜到终点以后,直接结束
附录
广搜模板(根据实际情况改动):
NODE t;
queue<NODE>q;
t={起点,终点,0};
q.push(t);
while(!q.empty()){
f=q.front();q.pop();
for(int i=0;i<可走情况;i++){
int nx=mx[i]+t.x;
int ny=my[i]+t.y;
if(不可走的情况) continue;
if(到达终点){
cout<<答案;
return 0;
}
q.push(nx,ny,t.step+1);
}
}
注意事项
广搜需要配合队列使用,请学习相关内容后在学习广搜
如果文中有错,请指出
谢谢您的观看!

















 2388
2388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









