







 该实验报告详细介绍了北京航空航天大学自动控制原理实验中关于控制系统串联超前和滞后校正的设计与验证过程。通过MATLAB软件进行模拟,分析了校正对系统稳定性及过渡过程的影响,旨在提升系统的性能指标。
该实验报告详细介绍了北京航空航天大学自动控制原理实验中关于控制系统串联超前和滞后校正的设计与验证过程。通过MATLAB软件进行模拟,分析了校正对系统稳定性及过渡过程的影响,旨在提升系统的性能指标。
北 京 航 空 航 天 大 学
自动控制原理实验报告

自动控制与测试教学实验中心
实验三控制系统串联矫正
实验时间 2013/12/11 实验编号 三 同组同学 无
一、实验目的
1.了解和掌握串联校正的分析和设计方法。
2.研究串联校正环节对系统稳定性及过渡过程的影响。
二、实验内容
2.设计串联滞后校正,并验证。
- 实验原理
1.系统结构图如图 3-1 所示
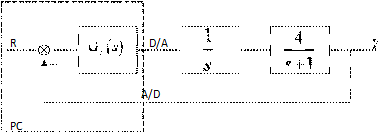
图3-1 系统结构图
其中为 校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
2.系统模拟电路如图3-2所示.
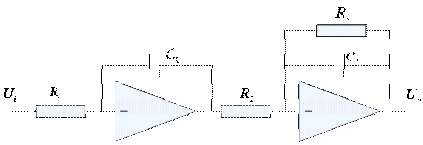
图3-2 系统模拟电路图
本实验的电阻取值:
3.未加矫正时,
4.加串联超前矫正时,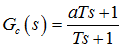
 。给定
。给定 ,则
,则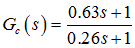 。
。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1569
1569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









