




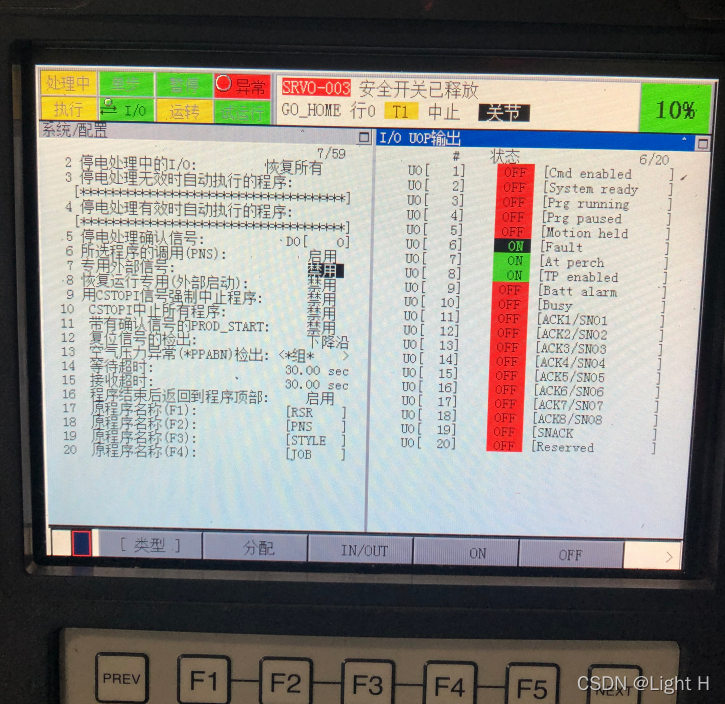
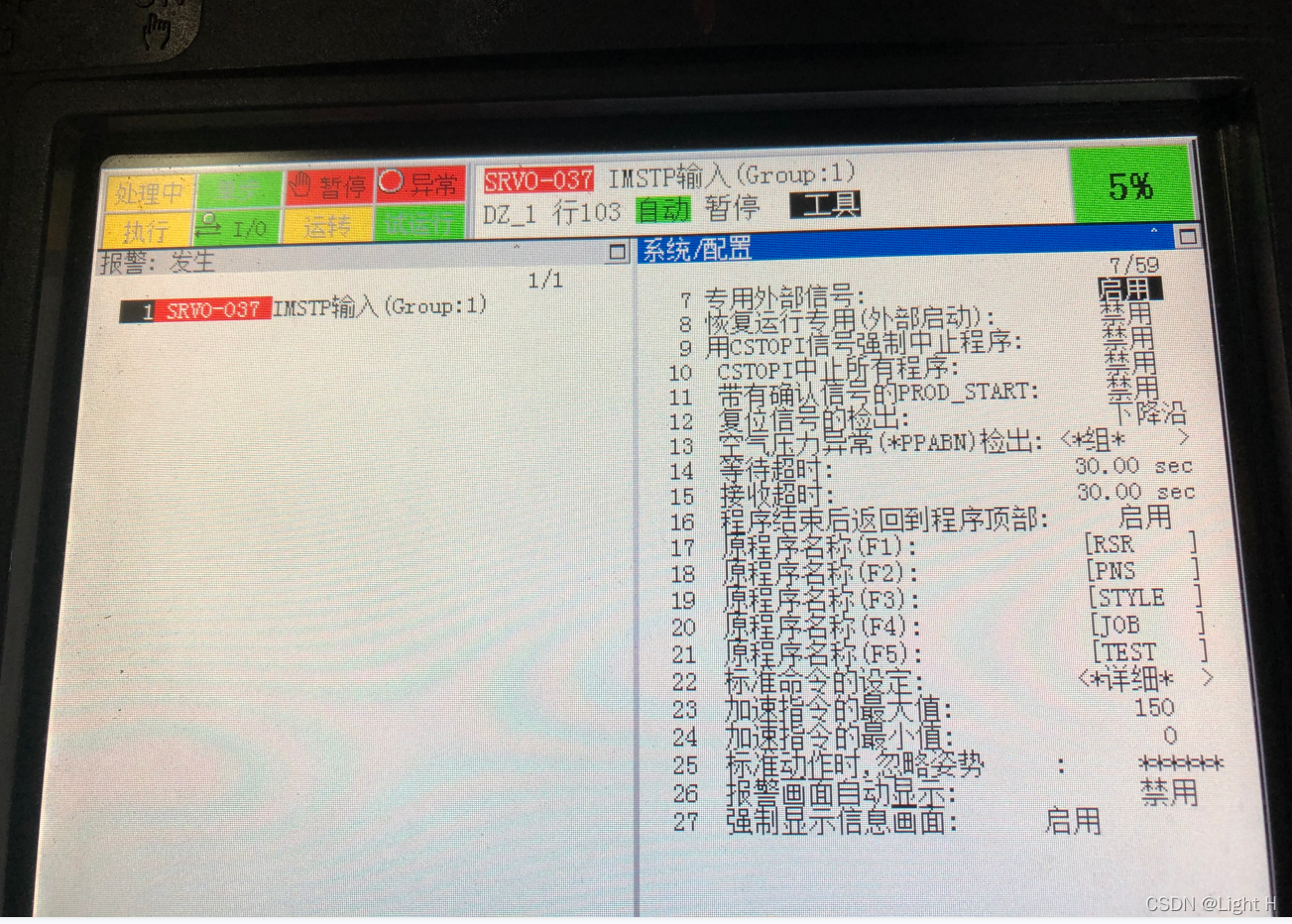
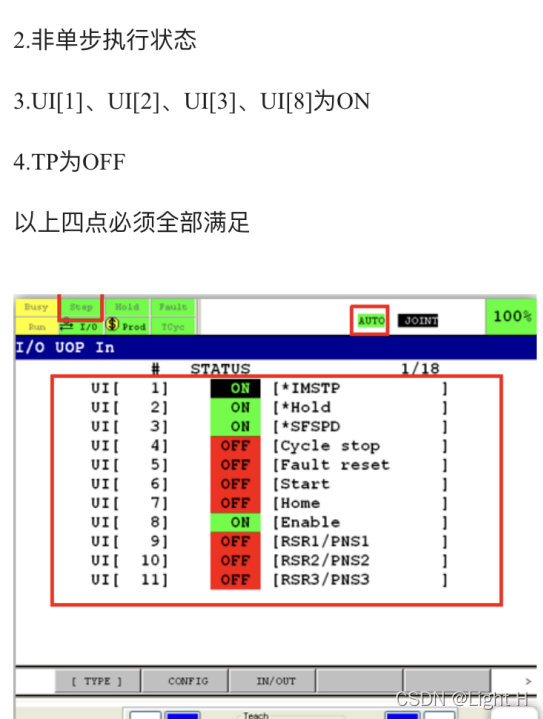
机器人在外部接有信号锁定的时候不能直接运动,有一个专用外部信号
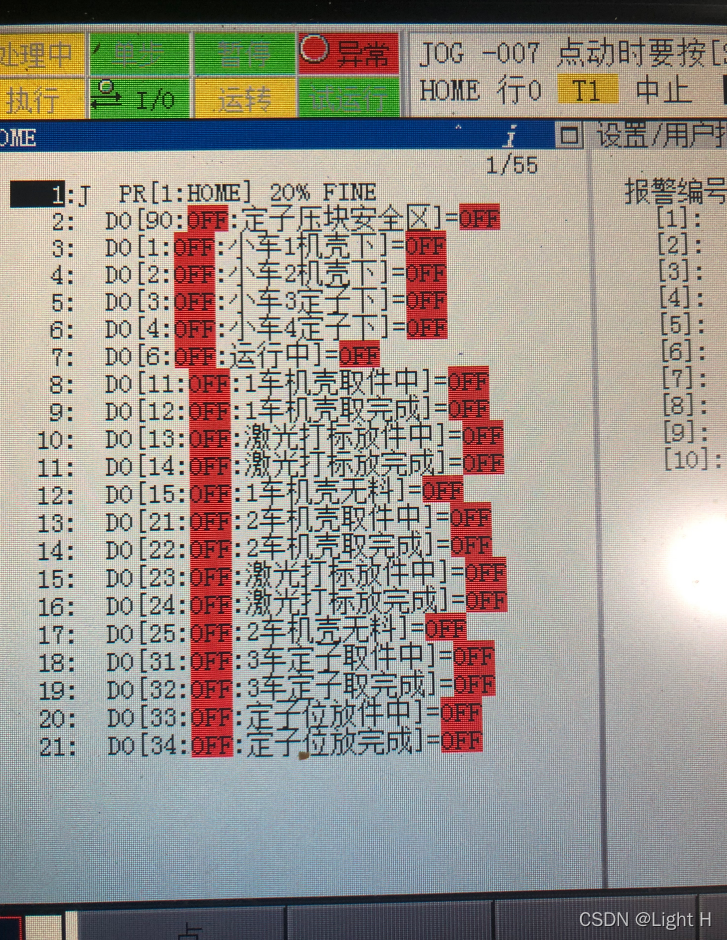
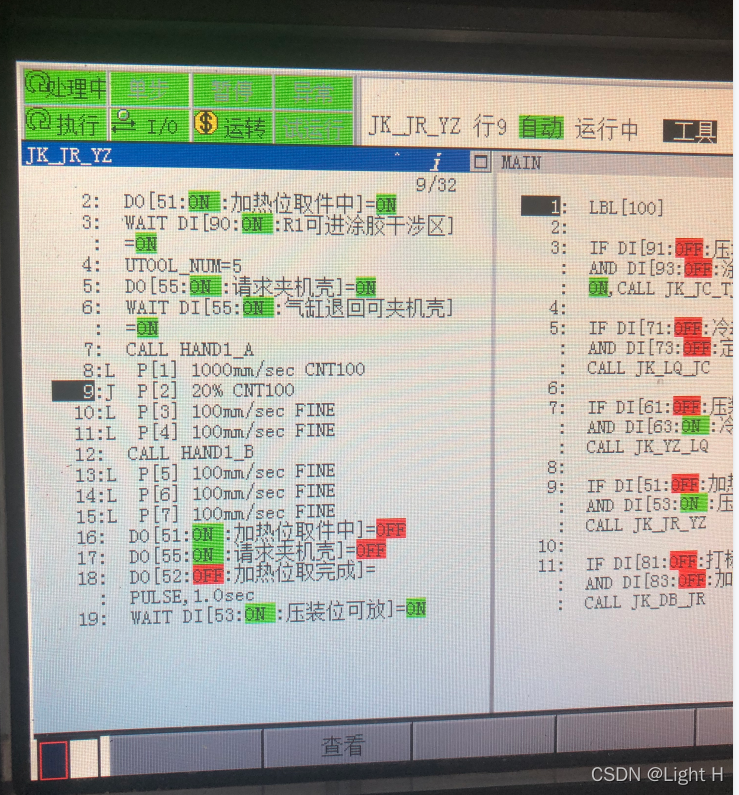
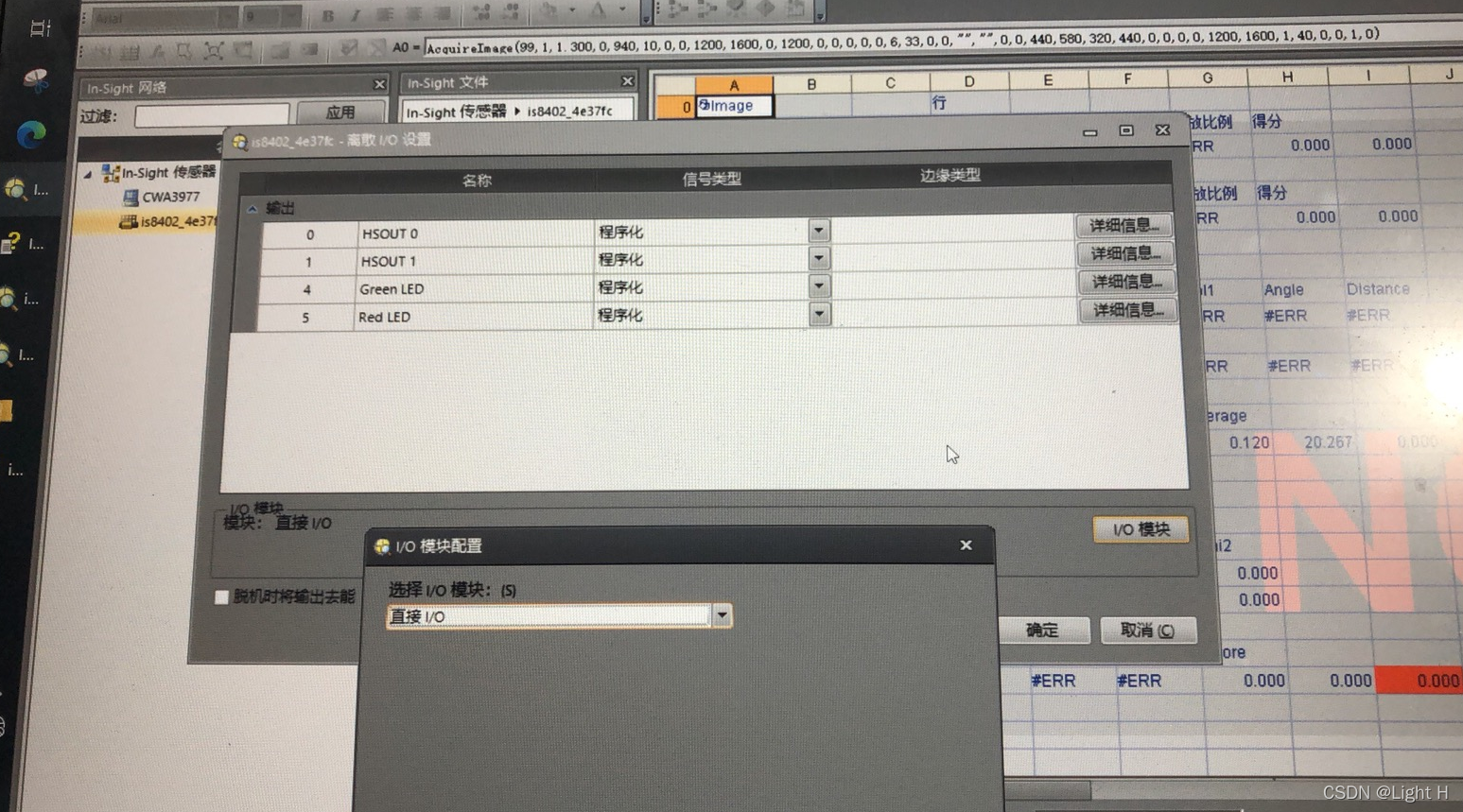
主要涉及一些程序的编写和IO输入输出的设置。以一个已有的程序进行设置。
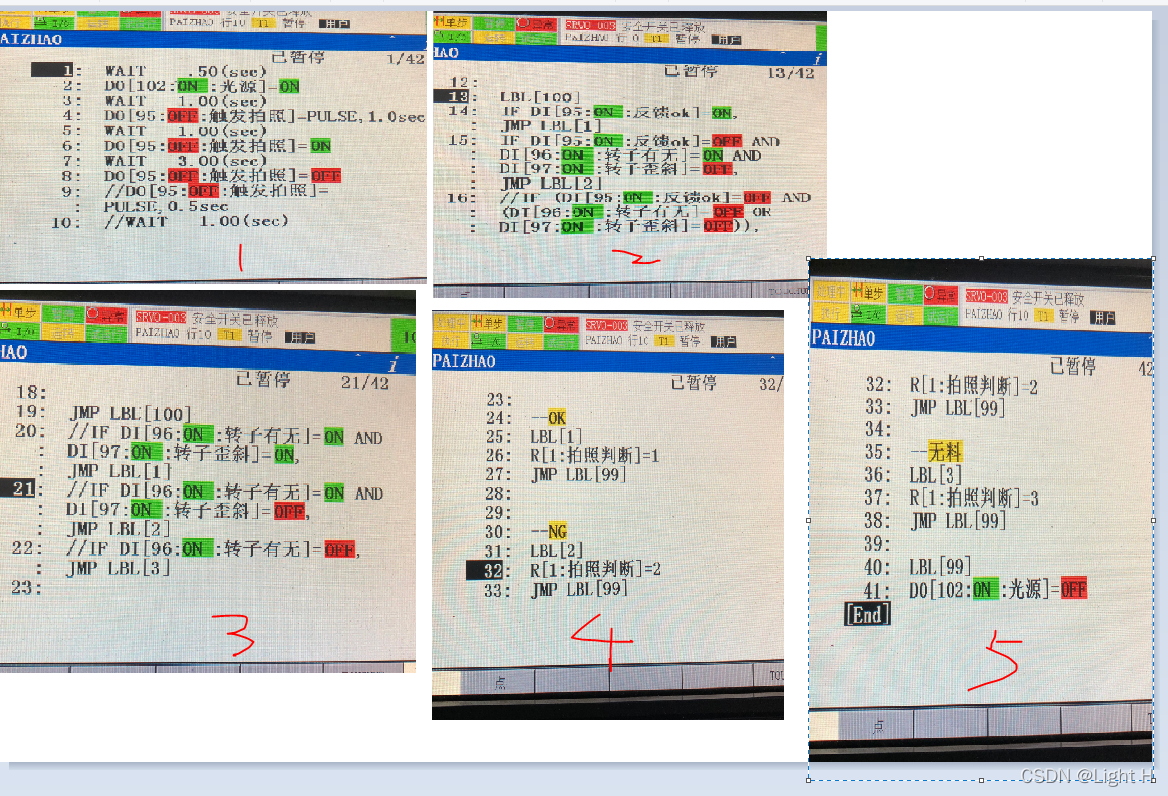
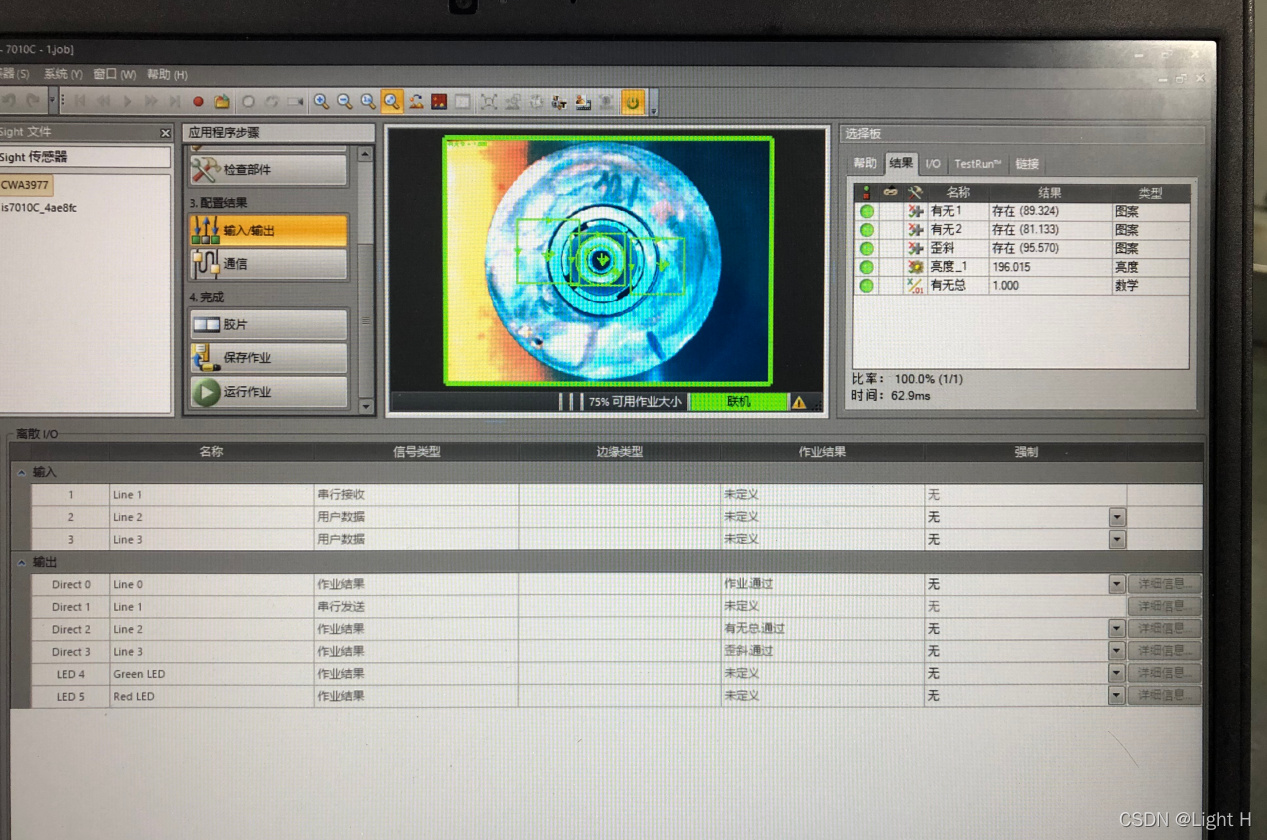
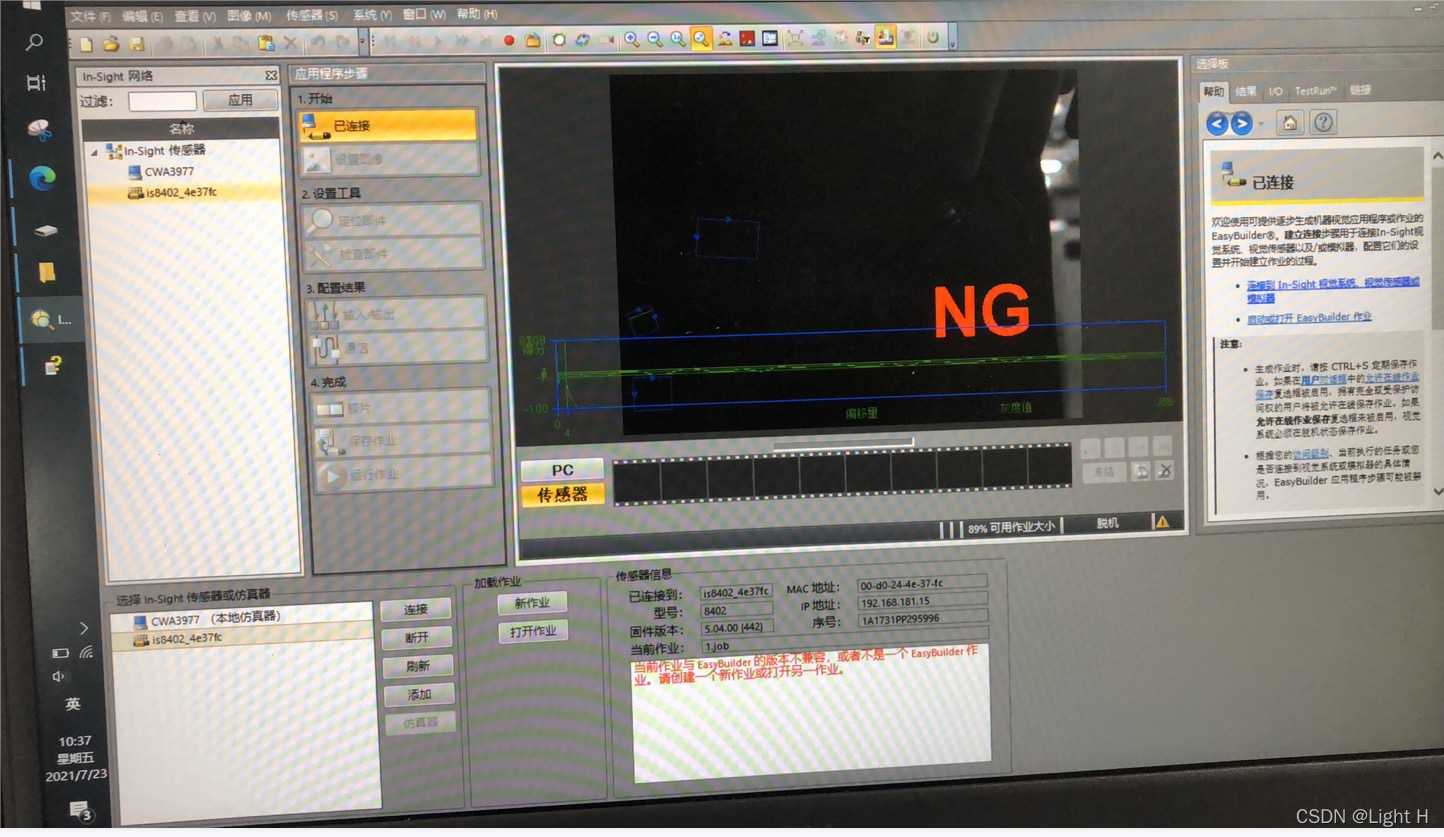
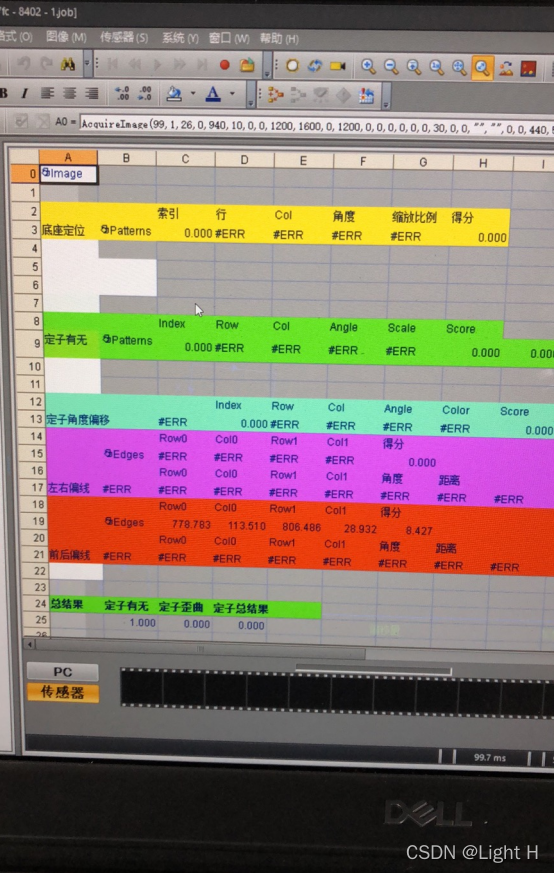
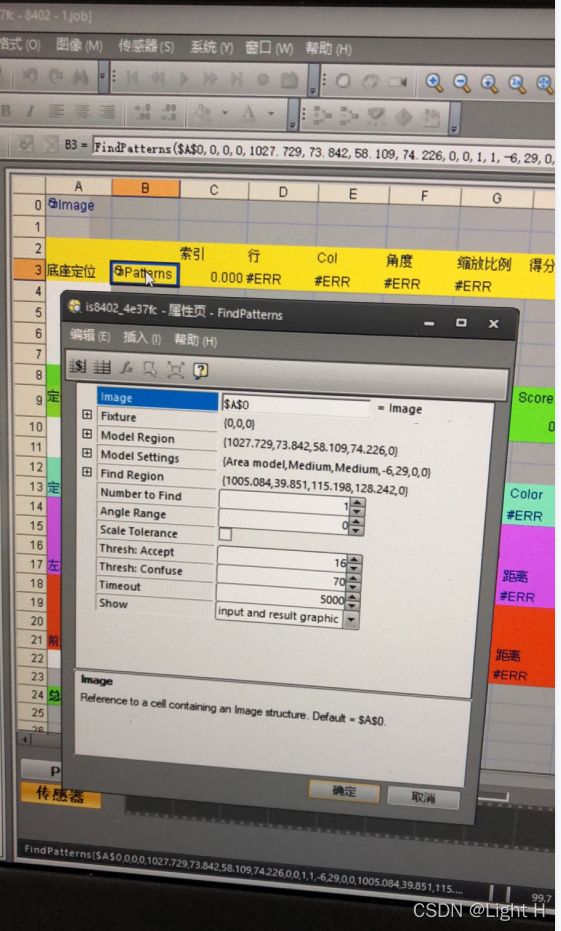
这个程序主要是和康耐视的InSight软件配合使用。
16)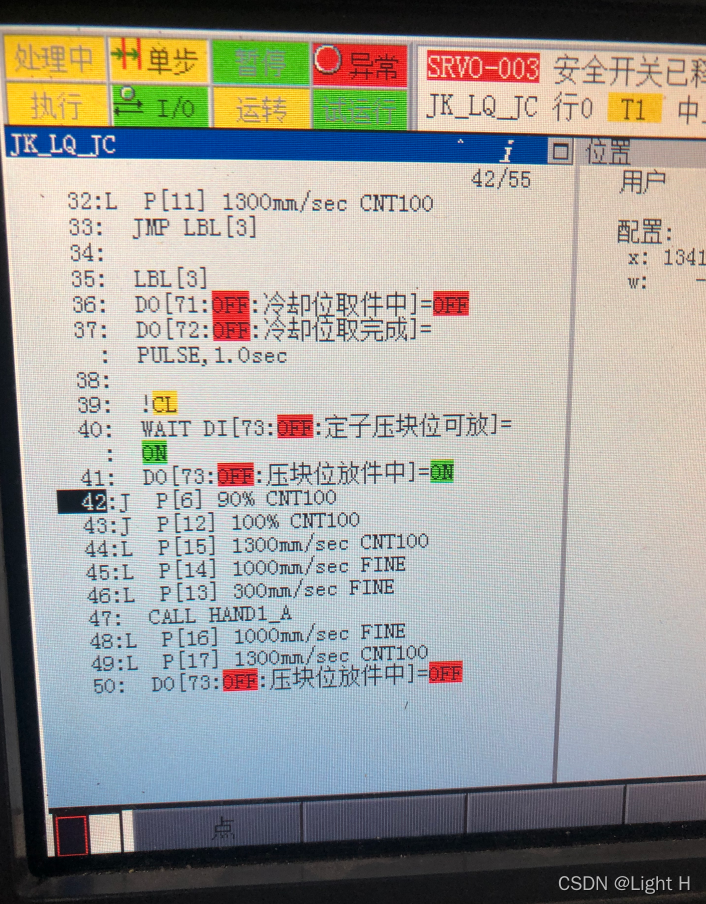
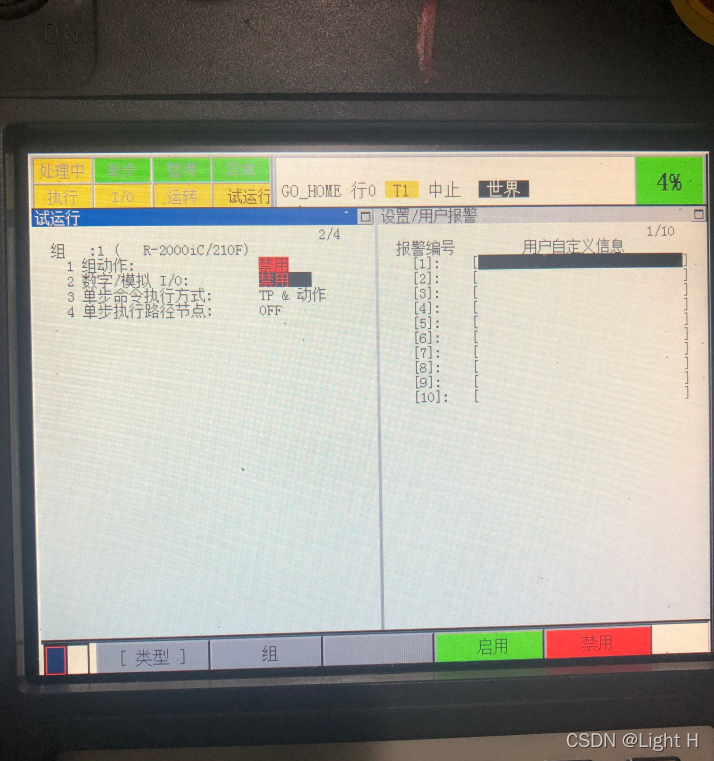
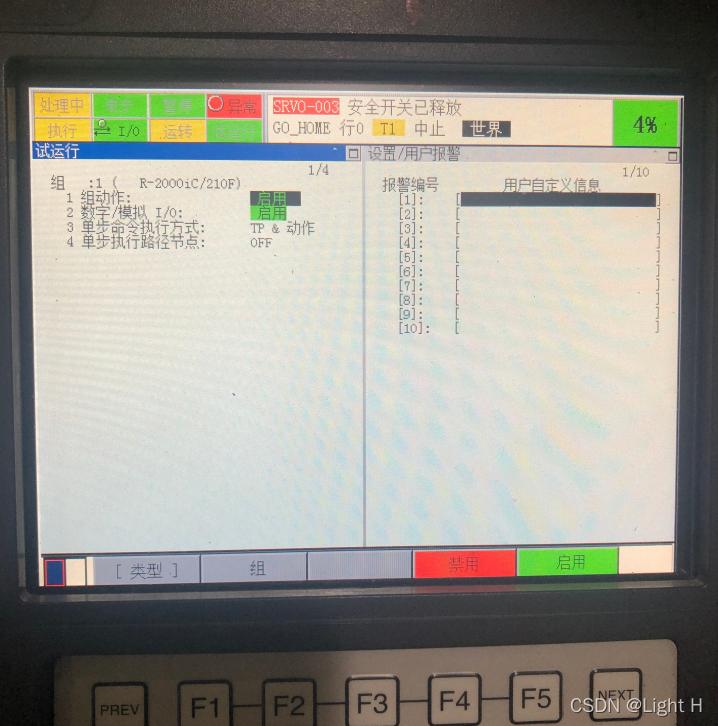
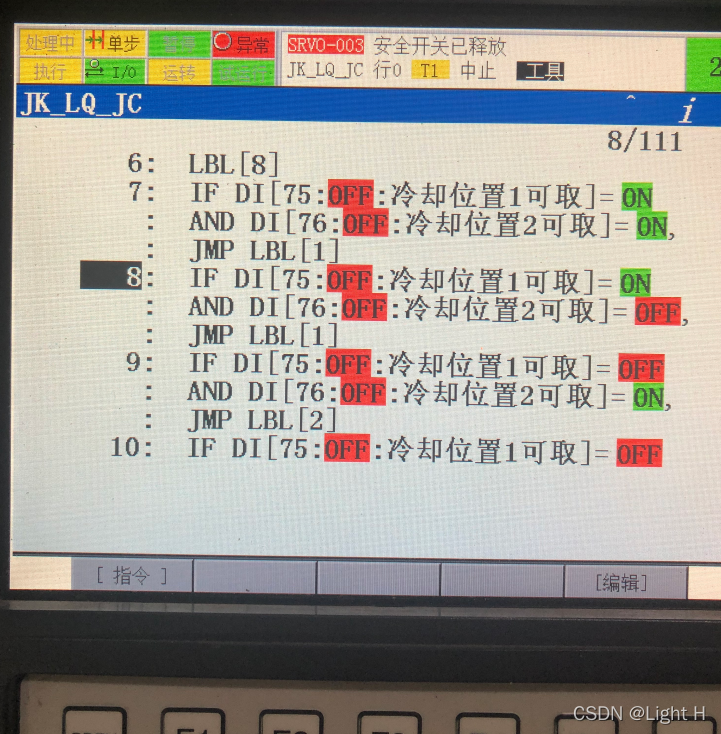
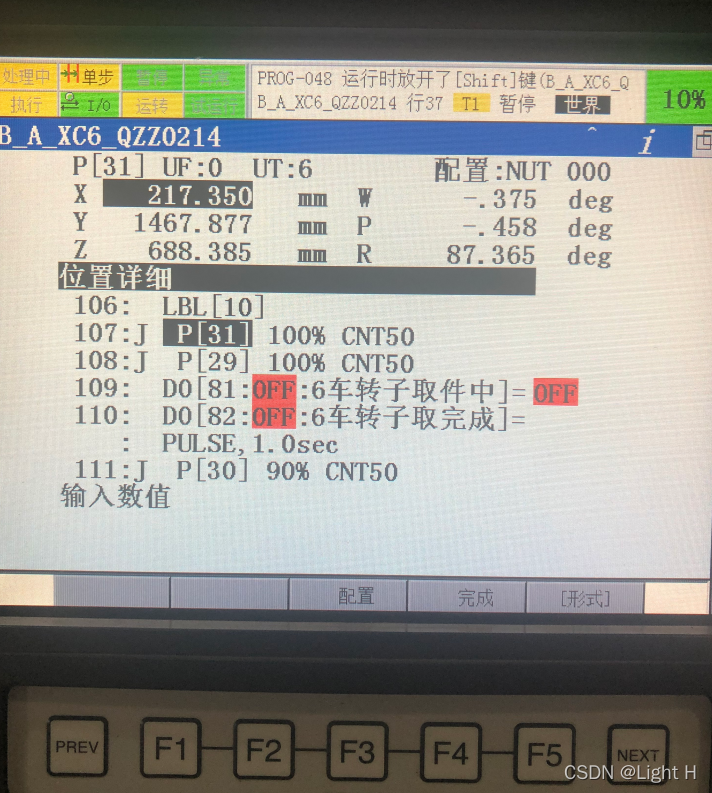 这里面主要是对于机器人程序的输入输出IO的一些设置和程序的编写设置
这里面主要是对于机器人程序的输入输出IO的一些设置和程序的编写设置
下面涉及到Insight软件使用的一些操作
FANUC机器人调试2
最新推荐文章于 2023-09-10 01:53:37 发布
 这篇博客探讨了在机器人系统中如何在外部信号锁定时阻止其运动,重点在于程序的IO输入输出设置。通过与康耐视InSight软件的配合,详细阐述了如何进行程序编写和IO配置,确保机器人在特定条件下能响应外部指令。
这篇博客探讨了在机器人系统中如何在外部信号锁定时阻止其运动,重点在于程序的IO输入输出设置。通过与康耐视InSight软件的配合,详细阐述了如何进行程序编写和IO配置,确保机器人在特定条件下能响应外部指令。

















 4143
4143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









