



拟人化机械手的抓取数据库生成器
1 引言
稳定的抓取综合研究已进行了几十年,由此衍生出大量抓取算法,详见[12]。这些算法大多依赖不同的度量指标[11]来评估抓取的稳定性。为了分析诸如论文 [5, 7]中的抓握质量度量,我们需要一个包含多种抓取方式的大型抓取数据库。
一项重要的相关工作是哥伦比亚抓取数据库[6]。这个公开的数据库包含了人手模型和Barrett机器人手的抓取集合。然而,该抓取数据库更倾向于手部与物体之间具有较大接触面积的抓握方式,称为动力抓握,而不是仅限于fingertips的精细抓握[10];两种抓握方式的示例如图1所示。
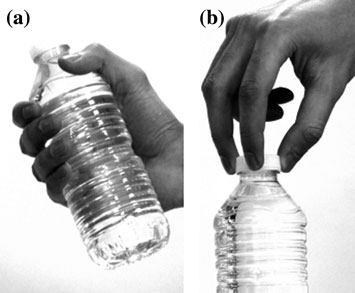
使用哥伦比亚抓取数据库分析质量度量无法告诉我们这些度量在精细抓握上的有效性。然而,对于机械手而言,手内操作的精细抓握才是主要目标,因为强力抓握很容易通过夹持器实现。
目前存在多种生成抓取的方法[12],但这些方法通常只生成特定类型的抓取,难以适应其他物体或其他机械手。本文提出的方法基于手部预形态的概念[14],并能够从抓取分类法[4]生成不同类型抓取的数据集。该方法易于适配到不同的机械手,并且适用于所有由三角网格建模的物体。
本文结构如下。第2节详细说明了我们算法所针对的抓取类型及其选择原因。第3节介绍手部预形态的概念,第4节解释生成过程。第5节讨论所获得的结果。最后,第6节总结全文并展望未来工作。
2 目标抓取
为了设计出与人手具有相同灵巧性的机械手,研究人员一直在研究人类的抓取行为。这项研究促成了多种分类法,用于对人类多样的抓取方式进行分类。
其中最新的分类法是由Feix等人[4]提出的。作者将人类的抓取行为分为33种抓取类型,并将其归为三类:力抓、中间抓和精细抓。
It’s useful to have the same variety of grasps for 拟人手, therefore we will base our 抓取数据库 on this taxonomy. We will limit our study in this paper to the grasps presented on Fig. 2. This set of grasps was chosen based
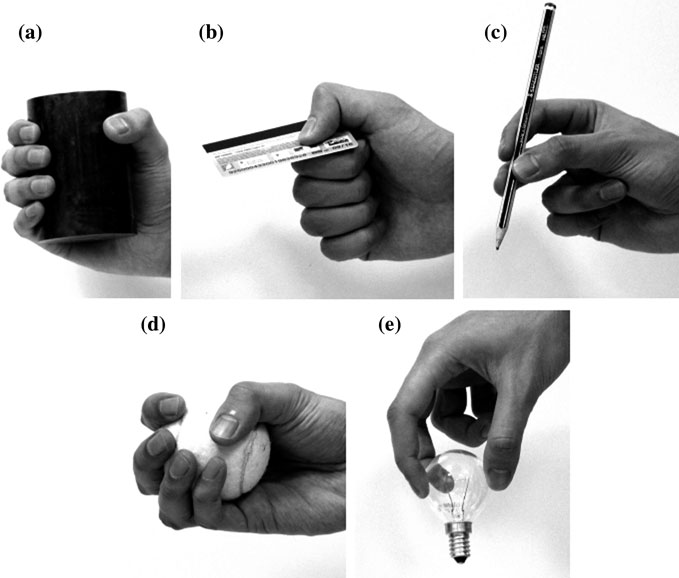
关于[3]的研究。作者分析了两名管家和两名机械师在日常工作中执行的近10,000次抓取实例。他们发现,这五种抓取类型涵盖了几乎70%的抓取动作。
中等包裹抓取和动力球抓取属于动力抓握。拇指‐2‐指和三脚架抓取属于精细抓握。在Feix’的分类体系中,侧捏抓取是一种介于两者之间的抓取方式。然而,为了简化,本文后续将其归为动力抓握,因为它在所提出的方法中与其他动力抓握具有相似的生成过程,详见第4节。
3 抓取预形状
抓取生成器基于手部预形态[14]。对于分类中的每种抓取类型,用户必须为机械手定义相应的预形状。这种预形状的概念扩展了[9]中定义的预抓取姿态,因为它还包括了手部应如何接近物体以及如何操作的信息
手指应如何移动。预形状包括接近阶段的初始关节值、手部朝向,以及手部闭合阶段中移动手指和固定手指的详细信息。
类似于特征抓取,预形状基于关节耦合。特征抓取的关节耦合是基于对人类抓取动作进行的主成分分析(如[13]中所述)。然而,这种分析甚至会导致手指之间的耦合,因此确定针对特定类型抓取应使用哪些特征抓取变得非常复杂。因此,特征抓取的概念难以适应以复现该分类体系。
我们预形状中的关节耦合主要用于fl手指的屈曲运动,从而在拟人手上实现更自然的抓取。图fi3展示了目标抓取的不同预形状。三脚抓握和拇指‐2‐3指抓取具有相同的初始关节值。区别在于手指闭合阶段。对于三脚抓握,外展‐内收关节会移动,而在拇指‐2‐fi指抓取中这些关节保持静止。
4 抓取生成
预抓取围绕物体移动,对于每个位置,手指闭合并评估抓取效果。对于每次抓取,我们通过验证抓取力空间的凸包是否包含整个力空间来检查其是否为力封闭。
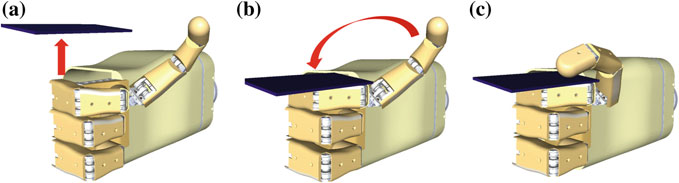 接近阶段。(b) 手指闭合阶段。(c) 抓取验证)
接近阶段。(b) 手指闭合阶段。(c) 抓取验证)
通过与物体关联的球面坐标系将机械手定位在物体周围。球面坐标系的中心沿物体最长维度进行采样。该过程以不同的手部方向重复进行。我们利用物体对称性调整采样范围,以减少计算时间。
动力抓握通过单一半径值进行采样,预形状逐渐靠近物体直至手与物体发生碰撞,然后fi关闭手指。该过程如图4所示。一旦抓取有效,即保存手部位置和在物体坐标系中的方向、关节值以及接触点及其法向量。
5 结果
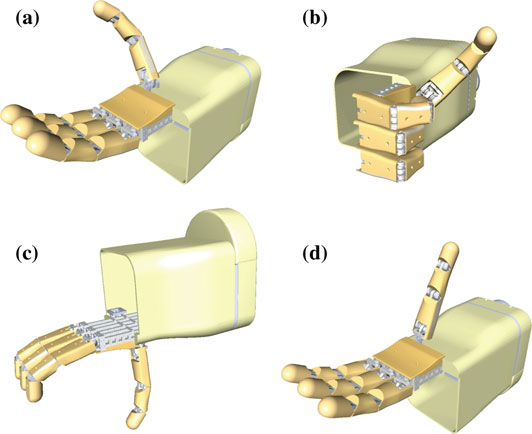
用于生成数据库的机械手是RoBioSS实验室开发的一种新型人手尺寸拟人化机械手。手部运动学模型如图5所示。该机械手有四个fi指,共十六个肌腱驱动自由度;每个fi指具有四个自由度。所有fi指的运动学几乎相同,唯一的区别是拇指具有略微不同的连杆结构
长度。长度见表1。每个finger具有一个外展‐内收关节和三个flexion‐extension关节。
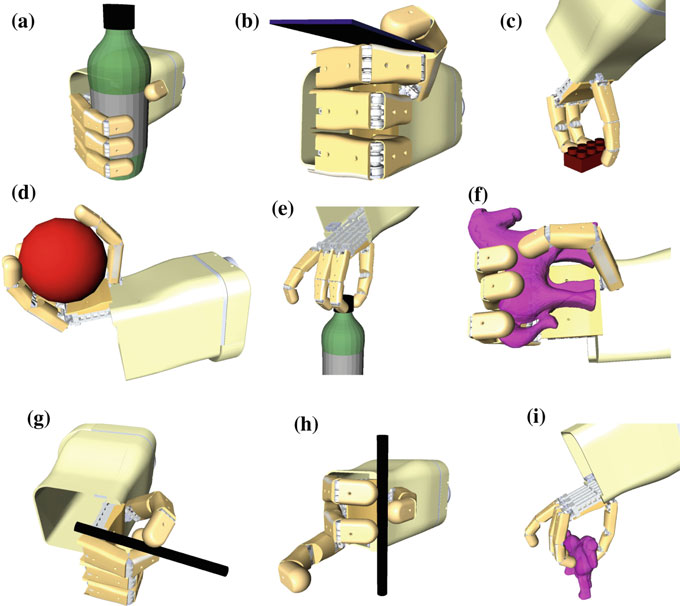
所提出的方法在开源软件OpenRAVE中实现[2]。为了获得丰富多样的抓取方式,选择了具有不同几何形状的多种物体来构建数据库。图6展示了所获得的抓取示例。
力闭合准则非常严格,因此生成的动力抓握无需任何后处理。然而,精细抓握需要
| 拇指 | T1 | T2 | T3 | T4 |
|---|---|---|---|---|
| 长度(毫米) | 15.2 | 53 | 40 | 21 |
| 手指 | F1 | F2 | F3 | F4 |
| 长度(毫米) | 15.2 | 45 | 35 | 22 |
更多用户干预,因为它们会产生许多不稳定抓取。为了自动过滤掉这些抓取,我们需要通过为精细抓握找到合适的质量度量来改进抓取验证过程。
6 结论
我们提出了一种能够生成大量不同类型抓握的方法。该方法适用于任何由三角网格建模的物体,并且可轻松适配于各种拟人手。针对每种期望的抓握类型,我们为机械手定义了手部预姿态。然后将该预形状应用于多个物体以生成数据库。动力抓握的生成效果相当好,且不需要太多用户干预,而精细抓握的生成则相对需要更多干预。
精密抓取数据集需要更多的后处理来过滤不稳定抓取。为了进一步自动化数据库生成,我们需要引入新的质量度量用于验证过程。这将在我们的未来工作中完成,下一步将是使用该抓取数据库来评估抓握质量度量。一旦该过程实现完全自动化,我们将添加更多抓取类型和物体以创建更大的数据库。

















 9855
9855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









