







概要: 这篇文章对ORB-SLAM2运行结果KeyFrameTrajectory.txt文件的内容进行简单的解释说明。KeyFrameTrajectory.txt文件内记录了ORB-SLAM2系统运行开始到结束这段时间内相机的关键帧位姿,理解KeyFrameTrajectory.txt文件内容是进行后续应用的第一步。
关键字: KeyFrameTrajectory.txt文件; 说明
1 文件说明
KeyFrameTrajectory.txt文件的部分内容如图1所示:
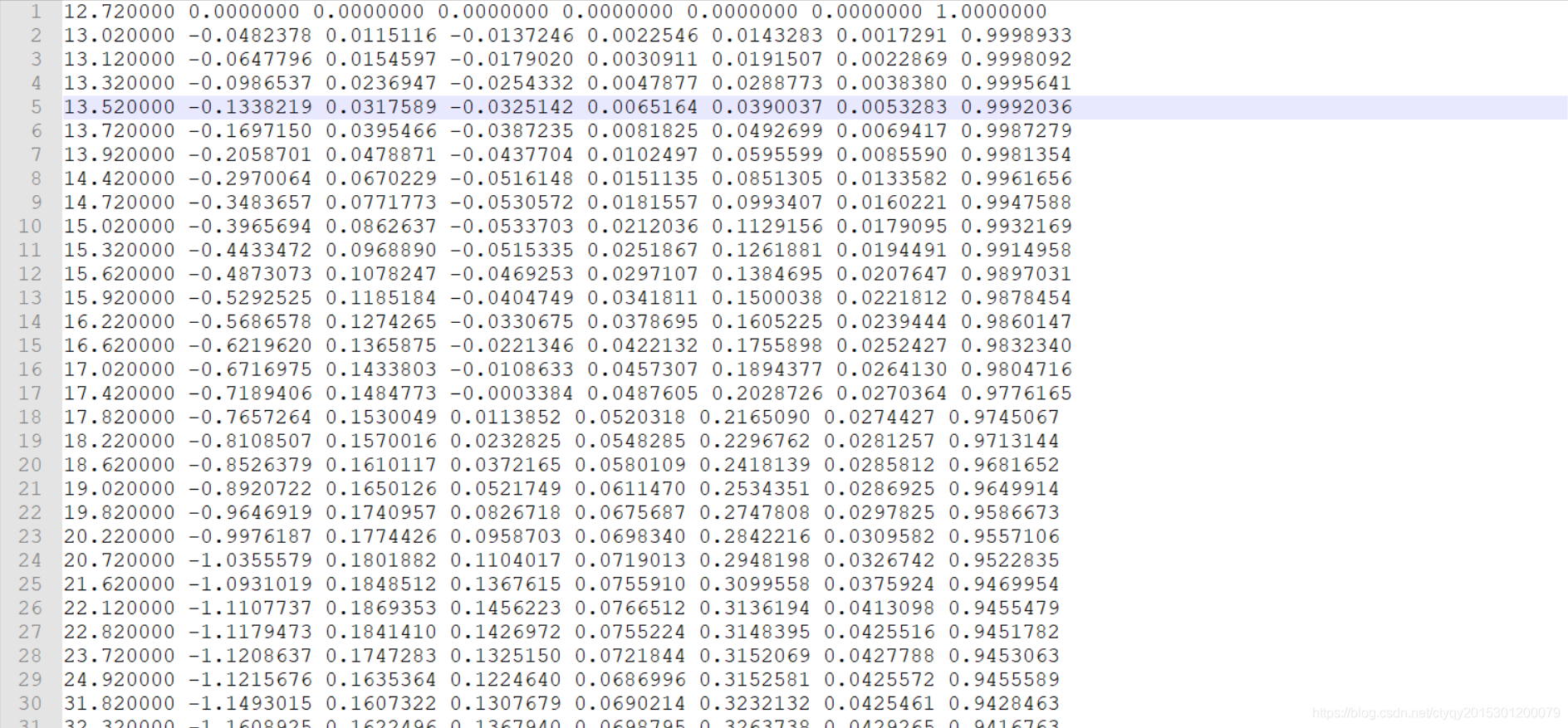
其中,每一行描述了一个关键帧的位姿。一行有8列,内容分别是:
其中timestamp是当前帧的时间戳,_x, t_y, t_z表示当前帧的位置,q1, q2, q3, qw是四元数,Q=q1*i+q2*j+q3*k+qw,表示当前帧的姿态。下面分别详细展开。
2.1 时间戳
timestamp是当前帧的时间戳,在ORB-SLAM2的图片命名规则中,当前帧的时间戳也就是当前帧的图像名。例如这里的第一个关键帧的timestamp是12.720000(秒),就是说明ORB-SLAM2是在系统运行到了第12.7秒时才开始工作的,之前的时间都在尝试初始化。
如果我们运行TUM数据集的话,第一列的时间戳数据却不是这样的,而是如图2所示:
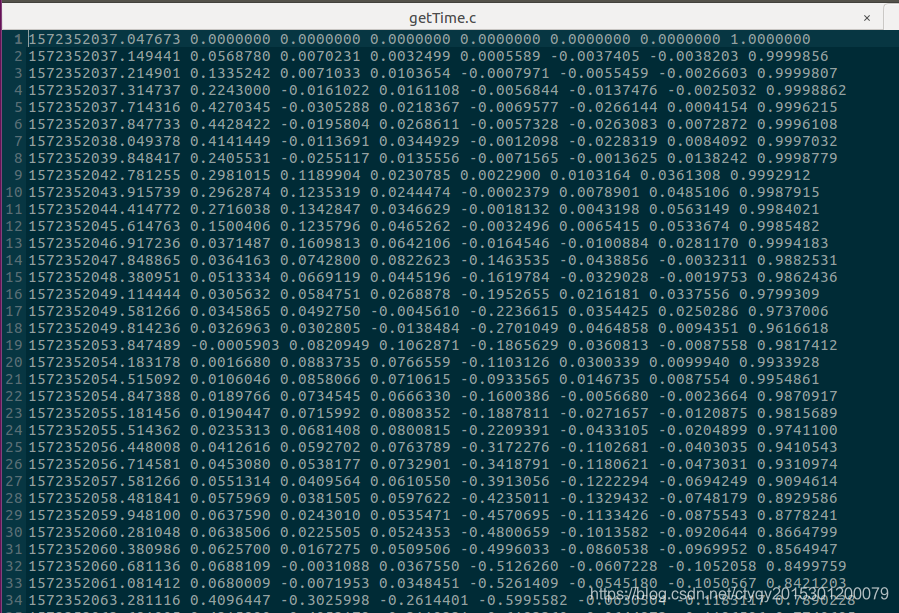
实际上在这里的时间戳,例如1572352037.147673,实际上是Linux系统下拍摄该帧时的Linux系统时间,单位是秒,这里精确到小数点后6位,说明精确到微秒。下面说说Linux系统时间。
UNIX及Linux的时间系统是由“新纪元时间”——Epoch开始计算起,单位为秒,Epoch则是指定为1970年一月一日凌晨零点零分零秒,格林威治时间。目前大部份的UNIX系统都是用32bit来记录时间,正值表示为1970以後,负值则表示1970年以前。我们可以很简单地计算出其时间领域是(单位:年):
准确的时间为2038年一月十八日星期一晚上十点十四分七秒,那一秒钟过去以后,时间将会转为负数,变成1901年十二月十三日星期五下午三点四十五分五十二秒。这就是所谓的UNIX 2038 BUG,或者Jason hatchet bug。当然,解决这个问题的办法也很简单:用64bit记录时间就OK了,这时Unix世界的末日将会推迟到银河系灭亡以后。
在Linux系统下获得当前时间戳的代码很简单,如下:
#include <stdio.h>
#include <sys/time.h>
int main(void)
{
struct timeval stamp;
gettimeofday(&stamp, NULL);
printf("tv_sec : %ld \n",stamp.tv_sec);
printf("tv_usec : %ld \n",stamp.tv_usec);
return 0;
}
结果如图3所示:
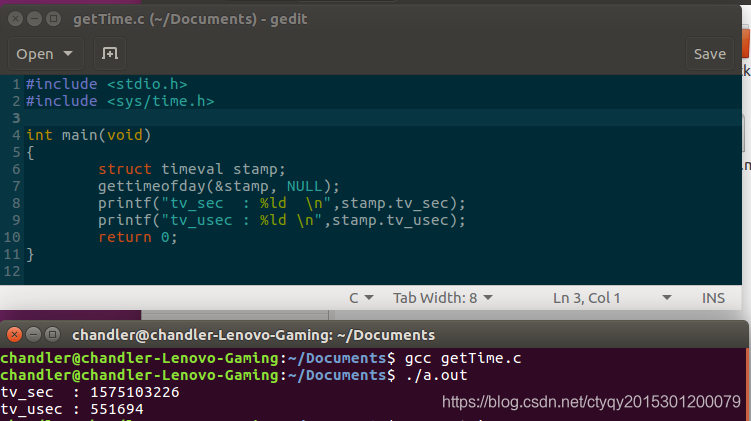
回到正文,第一列的1572352037秒就是2019年10月28日的某一秒。
2.2 位姿
现在介绍剩下7列。第2-4列分别是关键帧在初始帧坐标系下的位置坐标,初始帧坐标系就是ORB-SLAM2初始化成功时那一帧的相机坐标系,也就是ORB-SLAM2中的“世界坐标系”。因此你可以看到任意一个KeyFrameTrajectory.txt文件的第一行的2-4列都是0。
第5-8列分别是关键帧在初始帧坐标系下的姿态四元数,第5-7列为四元数的虚部,第8列为实部,因此你可以看到任意一个KeyFrameTrajectory.txt文件的第一行的5-7列都是0,第8列都是1。ORB-SLAM2系统下的相机坐标系的XYZ三轴朝向规定如下:
X、Y、Z三轴分别指向相机右侧、下侧和沿着光轴指向正前方
如图4所示:

由此,以第一帧为参考可以得到剩余关键帧的位姿,如果知道第一帧在真实世界中的位姿,就可以知道剩余关键帧在真实世界中的位姿,也就知道了相机在真实世界中的运动轨迹。
2 注意事项
有以下几点需要注意:
1-时间戳是有单位的,一般情况下是秒;
2-四元数可以转换为俯仰、滚转和航向角;
3-在单目SLAM中,KeyFrameTrajectory.txt文件的第2-4列表示位移的数据是没有单位的,这就是单目相机的尺度不确定性。

















 1726
1726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









