





本文经授权转载自焱公子(ID:Yangongzi2015)
老苗做程序开发,私信我说想辞职,让帮留意合适的工作。
我问,干得好好的,为啥要走?
“没法呆啊!去年刚来的应届研究生,和我干一样的活,工资比我还高 2000 块!”
我有些奇怪,不可能吧,你不是都工作五六年了么?一个新人比你待遇高?
老苗快速回应:“有什么奇怪?我去打听了,说入职薪资普调,但我这种老人不享受。明显是老板觉得新人好用,故意打压我呗!”
职场中,老板怠慢老人,重用新人的例子并不少见,但老人知根知底,熟悉工作流程,用起来更顺手,大多数情况下,老板是不会故意制造嫌隙的。
“老”,从来不是遭到“打压”的理由。
也许,因“老”而倚老卖老、停滞不前,甚至尸位素餐、消极怠工,才是根因。

习以为常,是你停止进化的开端
西汉文学家刘向说:“入芝兰之室,久而不闻其香;入鲍鱼之肆,久而不闻其臭。”
父母从小到大的宠溺,让你觉得全世界都该为你让道;
有个人持续对你好,让你误认为对方本该一直对你好;
一个环境无论好坏,只要待的时间足够长,最终你都会融入其中。
以上这些都是生活中常说的:习惯了。
心理学上有适应性偏见:随着时间推移,你会对任何一件事都慢慢习惯。
恰是适应性偏见,让老苗从内心深处认定,自己工龄长、资历深,薪资待遇理所应当高过应届新人。
这话对么?
对的!正常来讲,确实本该超过。
尤其是在一些新兴行业,技术更迭快速。深耕三五年,你也极有可能成为业界权威。
权威薪资超不过新人?这不可能。
但按照老苗原话:新人干的活和自己一样。这句本身,就暴露出他的问题。
你已工作五六年,为什么还跟新人干的活一样?
老板宁愿多花 2 千给新人,却不肯给你老苗加薪水,他心里应该是算过一笔账吧?
这笔账,叫做“按实际价值付费”。在老板的心里,老苗的价值就这点钱。
对环境和过往既得习以为常,认为一切都理所应当,因而止步不前,就别抱怨拿不到更高收入。
停止进化,安于现状,注定被嫌弃。

你值多少钱,取决于你当前的“潜能”
在前公司时,老板教我用态度与能力管理方格来评估下属表现。
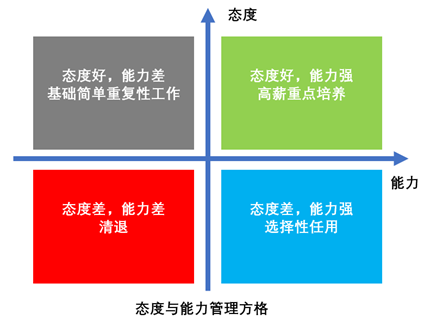
如上图所示,通过四象限划分,可将评估者分为四类:
第一类,态度好,能力强。
这类人,无论何时都是重点培养对象,公司会提供最好的项目资源,给予最高薪资与奖金。
第二类,态度差,能力强。
这类人,需要在严格监管下,选择性任用,比如团队配合较少的专项技术类工作。同时,视其结果好坏,决定是否分配更重要项目。
第三类,态度好,能力差。
这类人,通常先以基础、简单、重复性工作安排为主,再辅以一些培训引导,看能否转化为第一类人。
第四类,态度差,能力差。
这类人,没什么好说的,直接清退,不浪费彼此时间,是最佳选择。
从老板或管理者的角度看,你当前在哪个象限内,就已经决定了你在他心中值多少钱。
我的前辈老朱是典型的第一类,他从无线优化工程师做起,一开始做 GSM,后来多次主动请缨,做 EDGE、WCDMA。上 4G 后,又主动申请带队攻坚。
现在,老朱是公司为数不多的、贯穿 2G 到 4G 的技术大拿,每年的涨薪和绩效,都位于绝对的第一梯队。
尽管他今年已经 41 岁,在公司工作已超过 15 年,是个绝对的“老人”,但他依然是老板和同事们的香饽饽。
因为在大家眼中,他始终“潜能无限”,与年岁无关。

让自己持续值钱,分享 3 个策略
身在职场,我们要如何才能让自己持续值钱,我想分享 3 个策略。
1. 建立微目标清单
所谓微目标清单,即一系列连续、可进阶的小目标组成的集合。
当你动力满满达成一个目标,可该目标单一,且再无后续,那一定会很快懈怠,进入停滞期。
针对技能学习,细化目标,设定不同维度,才有助于自我进化的完成。
比如,你是个写作小白,希望在写作上有所成就,可以这样设置:
a. 每天阅读 1 小时,日更 800 字;
b. 尝试有偿投稿,1 个月内,至少上稿 1 篇;
c. 3 个月内,签约 XX 平台;
d. 一年内,出一本书;
……
微目标落地的关键,是这一系列目标可衡量、可量化,彼此关联,形成目标台阶。
当你完成前一阶段目标时,要不断添加新的目标,以持续进阶。
2. 培养“卡位意识”
职场中,你的不可替代性越强,就越值钱。要做到这点,你得擅长“卡位”。
前文的老朱,他擅长把握最前沿动向,第一时间卡位,最终成为公司极少数掌握全面核心技术的顶尖人才。
越会卡位,越稀缺,才越不可动摇。
培养卡位意识,你得善于分析:当前公司最缺的岗位是什么?什么样的技能在行业内是最不可或缺的?
同时,以此为目标,不断努力靠近。
如果你身处一个稳定型的行业,没有那么多创新,那么你可以不断淬炼当前技艺。
若能做得更深入,更贴近用户,一样可以迅速卡位,将自己做成稀缺资源。
我以手机为例,分享一个简单思路,供你快速识别趋势,找到“卡位点”:
首先,你要分析公司出产的手机,体验最不好的部分。比方说从前的瓶颈,是屏幕不够大,分辨率不够高,速度不够快。
随着技术突破,现在最大的问题,是电池待机时间过短。
为改善体验,市场上不少公司都围绕共享充电宝、生物电池、手机耗电优化等方面做文章。
这时,如果你速度够快,就可以在这些方面占领先机。
当首要矛盾被解决后,新的矛盾就会出现,第一时间琢磨出用什么解决方案应对,你就找到了新的卡位点。
3. 保有即战力
即战力的意思,是能临危受命,具备随时投入新战斗的能力。一旦有机会来临,你可以立即主动举手,而不是被动等待分配。
要做到这点,一靠平时积累,二靠在途改善思维。
一位销售精英曾跟我分享过一句理念:先敲门,然后再想说什么。
机会稍纵即逝,当你完全想好说什么,竞争对手早就坐在客户对面了。
成熟的职场人,都懂得 50 分即起跑,在过程中不断改善迭代,而不是非要有九成把握,才敢迈出第一步。
你的即战力越强,也就越值钱。
刘润曾说过:工资,是用来支付给责任的。责任越大,工资越高。涨工资,是因为你承担了更大的责任。
职场中,你最重要的责任,是对自己负责。别管年岁,挖掘潜能,持续进化,才是你承起的最大担当。
作者简介:焱公子,发型光芒万丈的跨界理工男。多年500强,专注写职场。写有灵魂的故事,过有温度的人生。微信公众号:焱公子(ID:Yangongzi2015)。
获得20万程序员的点赞!Python这波操作厉害了!
https://edu.youkuaiyun.com/topic/python115?utm_source=cxrs_bw



热 文 推 荐
戳他↓↓↓

☞ 救救中国 996 程序员!GitHub 近 230,000 Star、Python 之父伸张正义!
☞ 一次爬取腾讯视频 390,000 条弹幕我都踩了哪些坑?
☞ 特斯拉Q1销量大跌,马斯克吹出的“交付100万”如何破?| 极客头条
☞ 2019年技术盘点微服务篇(二):青云直上云霄 | 程序员硬核评测
System.out.println("点个在看吧!");
console.log("点个在看吧!");
print("点个在看吧!");
printf("点个在看吧!\n");
cout << "点个在看吧!" << endl;
Console.WriteLine("点个在看吧!");
Response.Write("点个在看吧!");
alert("点个在看吧!")
echo "点个在看吧!"
 你点的每个“在看”,我都认真当成了喜欢
你点的每个“在看”,我都认真当成了喜欢

















 1259
1259












 到【灌水乐园】发言
到【灌水乐园】发言







