




本文来源公众号“3D视觉工坊”,仅用于学术分享,侵权删,干货满满。
原文链接:点云中ICP算法的详解
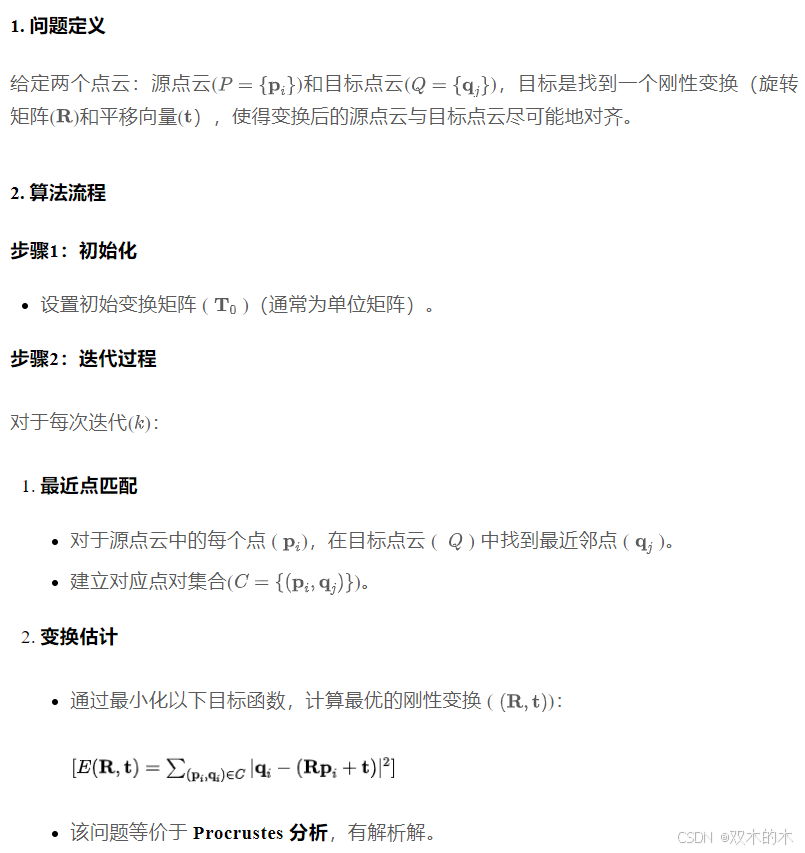
ICP(Iterative Closest Point)算法是一种用于刚性点云配准的经典算法。其核心思想是通过迭代地寻找两个点云之间的最近点对,并计算最优的刚性变换(包括旋转和平移),使得源点云在目标点云的坐标系下对齐。ICP算法广泛应用于计算机视觉、机器人导航、3D建模等领域。
一、发展历史
ICP算法最早由 Besl 和 McKay 于1992年在论文《A Method for Registration of 3-D Shapes》中提出。几乎在同一时间,Chen 和 Medioni 也独立地提出了类似的算法。自提出以来,ICP算法经历了多次改进和扩展,以提高其收敛速度、精度和鲁棒性。以下是ICP算法的发展历程:
-
基础ICP算法(1992):最初的ICP算法采用点到点的距离度量,通过迭代最近点匹配和最小化均方误差实现点云配准。
-
改进的ICP变体:
-
点到平面ICP:考虑点与对应平面的距离,提高了在具有平面特征的场景中的收敛速度。
-
点到曲面ICP:用于处理更复杂的曲面模型。
-
加权ICP:为不同的点对赋予不同的权重,以提高配准精度。
-
-
全局优化和鲁棒性增强:
-
采用k-d树加速最近邻搜索:提高算法的效率。
-
引入鲁棒估计器:如RANSAC、M-estimators,减少异常值对配准的影响。
-
多尺度ICP:通过从粗到精的多尺度策略,提高算法的全局收敛性。
-
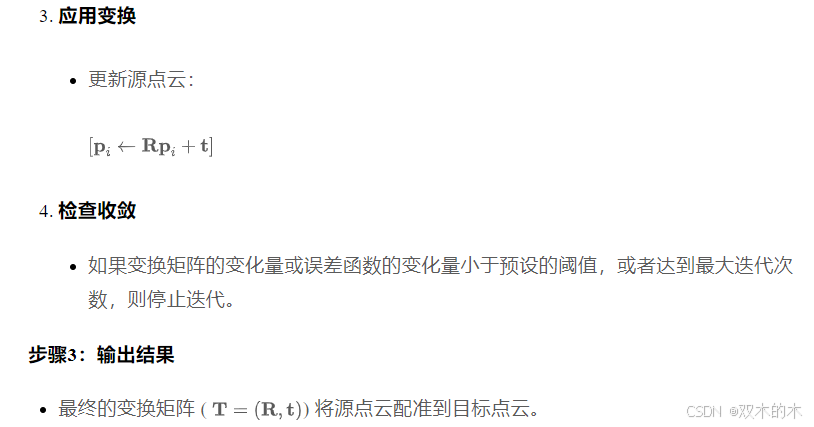
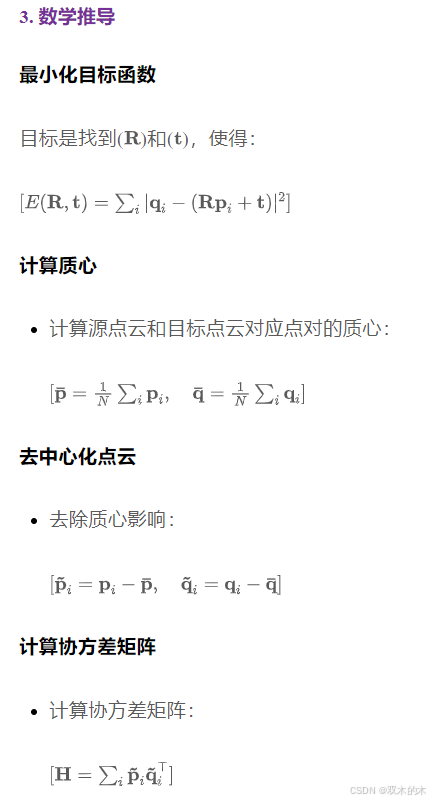
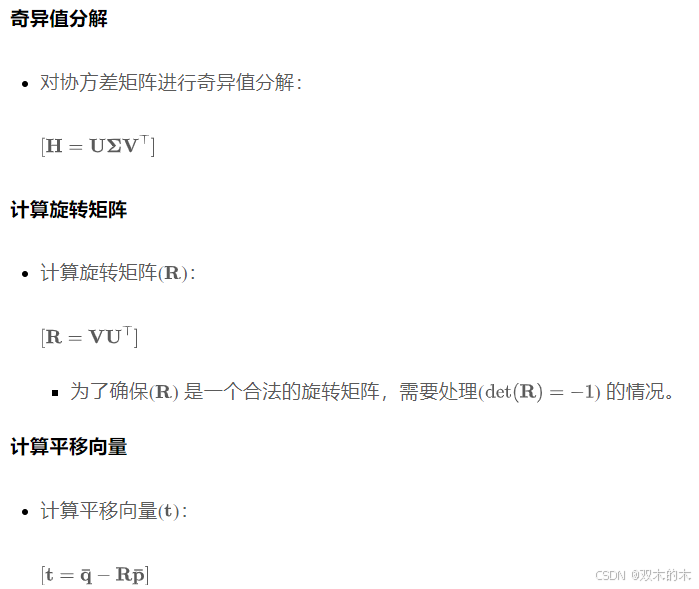
二、数学原理
三、应用领域与场景
1. 3D建模与重建
-
多视角扫描数据融合:在获取物体或场景的多视角点云数据后,使用ICP算法对不同视角的数据进行配准,生成完整的三维模型。
2. 机器人导航与定位
-
SLAM(Simultaneous Localization and Mapping):在未知环境中,机器人通过传感器获取环境的点云数据,利用ICP算法实现自身定位和地图构建。
3. 医学影像分析
-
三维医学图像配准:将不同时间、不同模态的医学图像进行配准,辅助诊断和手术规划。
4. 计算机视觉与图形学
-
物体识别与跟踪:通过将实时获取的点云与已知模型进行配准,实现物体的识别和姿态估计。
5. 质量检测与逆向工程
-
制造业中的误差分析:将实际产品的扫描点云与设计模型进行配准,分析制造误差和变形。
四、优缺点
优点
-
简单易实现:ICP算法思想直观,步骤简单,易于编码实现。
-
广泛适用性:适用于刚性物体的配准,且对不同类型的点云数据都能使用。
-
渐进式优化:通过迭代逐步逼近最优解,能够在一定程度上克服初始误差。
缺点
-
依赖初始位置:ICP算法对初始变换的依赖性较强,初始位置差异过大会导致算法收敛到局部最优解甚至不收敛。
-
容易陷入局部最优:由于采用最近邻匹配,可能在复杂场景下陷入局部最优,影响配准精度。
-
计算量较大:在大规模点云数据下,最近邻搜索和迭代过程计算量大,耗时长。
-
对噪声和异常值敏感:噪声点和异常值会影响最近邻匹配的准确性,导致配准误差。
五、算法实例
下面提供一个使用Python和Open3D库实现ICP算法的示例代码。
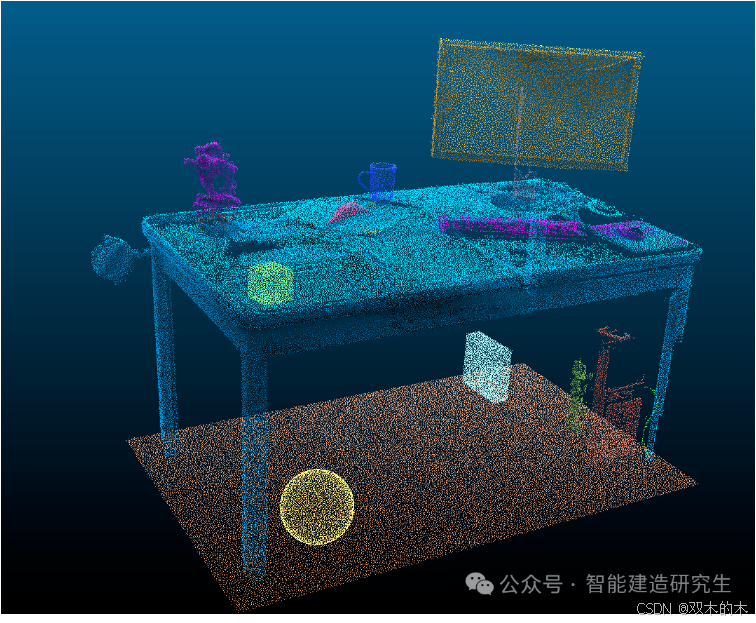
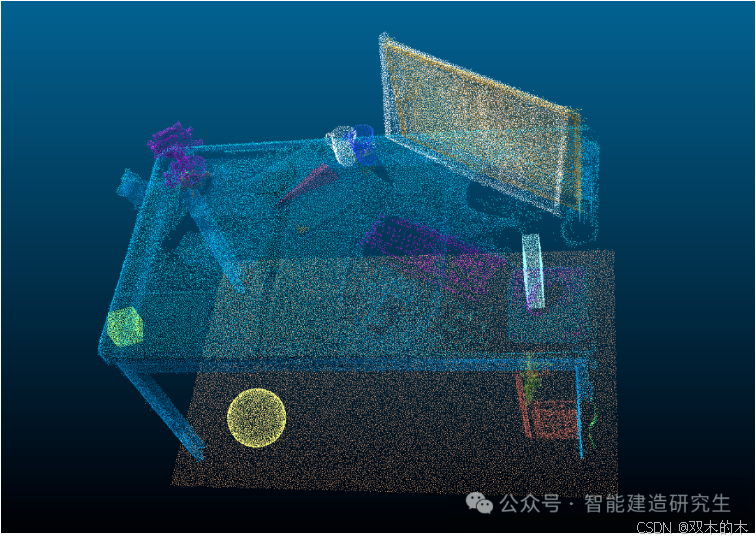
复制一份数据并错开,对两份数据进行ICP配准:
示例代码:
# ICP is only valid when two point cloud is coarse registration basically.
import numpy as np
import open3d as o3d
# 读取点云数据
def read_txt_pointcloud(file_path):
# 使用 numpy 加载数据,假设每行是 x y z,用空格或制表符分隔
points = np.loadtxt(file_path)
point_cloud = o3d.geometry.PointCloud()
point_cloud.points = o3d.utility.Vector3dVector(points)
return point_cloud
# 执行 ICP 算法
def icp_registration(source_cloud, target_cloud, threshold=1.0):
# 初始变换矩阵(单位矩阵)
trans_init = np.identity(4)
# 采用 Point-to-Point ICP
reg_p2p = o3d.pipelines.registration.registration_icp(
source_cloud, target_cloud, threshold, trans_init,
o3d.pipelines.registration.TransformationEstimationPointToPoint())
return reg_p2p
# 可视化点云
def visualize_registration(source_cloud, target_cloud, transformation):
# 变换源点云
source_temp = source_cloud.transform(transformation)
# 给点云上色
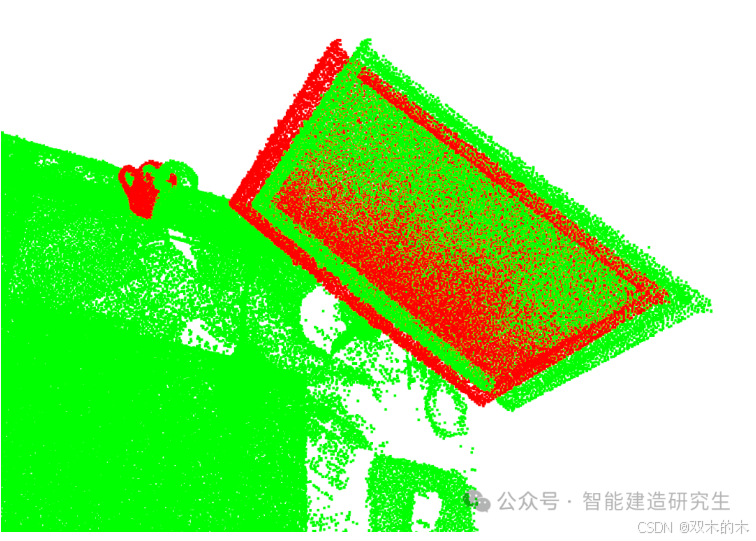
source_temp.paint_uniform_color([1, 0, 0]) # 红色
target_cloud.paint_uniform_color([0, 1, 0]) # 绿色
# 显示
o3d.visualization.draw_geometries([source_temp, target_cloud],
window_name='ICP Point Cloud Registration',
width=800, height=600)
def main():
# 读取源点云和目标点云
source_cloud = read_txt_pointcloud('screen.txt') # 源点云
target_cloud = read_txt_pointcloud('desk.txt') # 目标点云(BIM 模型)
# 下采样(可选):加速计算,减少噪声
voxel_size = 0.05 # 根据数据尺度调整
source_down = source_cloud.voxel_down_sample(voxel_size)
target_down = target_cloud.voxel_down_sample(voxel_size)
# 计算法线(如果需要使用 Point-to-Plane ICP)
source_down.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
target_down.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
# 配准阈值(根据数据尺度调整)
threshold = 1000
# 执行 ICP 配准
reg_result = icp_registration(source_down, target_down, threshold)
# 打印结果
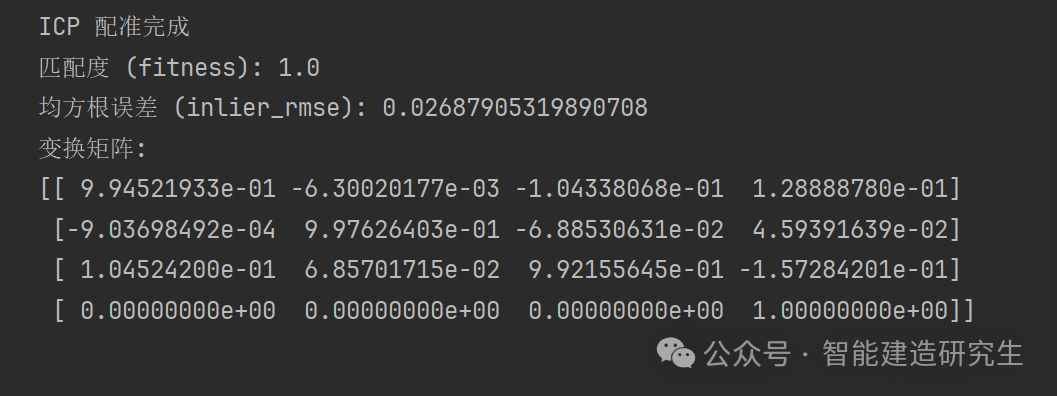
print("ICP 配准完成")
print("匹配度 (fitness):", reg_result.fitness)
print("均方根误差 (inlier_rmse):", reg_result.inlier_rmse)
print("变换矩阵:")
print(reg_result.transformation)
# 可视化配准结果
visualize_registration(source_cloud, target_cloud, reg_result.transformation)
if __name__ == "__main__":
main()
结果如下:
ICP算法还需要进一步调试,达到满意的结果。如果点云的初始位姿与对应点云差距较大,则算法效果较差。
六、总结
ICP算法作为点云配准的基石算法,具有重要的理论意义和实用价值。通过不断的改进和优化,ICP算法在处理复杂的点云配准任务中依然发挥着重要作用。对于初学者,理解ICP的基本原理和实现方法,是深入学习点云处理和三维计算机视觉的关键一步。
THE END !
文章结束,感谢阅读。您的点赞,收藏,评论是我继续更新的动力。大家有推荐的公众号可以评论区留言,共同学习,一起进步。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









