



摘要
人工智能(AI)在自动驾驶领域扮演着至关重要的角色。通过深度学习、强化学习和传感器融合等技术,AI能够实现环境感知、路径规划和决策控制等核心功能。本文将详细介绍AI在自动驾驶中的应用场景,包括激光雷达、摄像头和毫米波雷达等传感器的应用,以及AI与传统自动驾驶技术的对比。通过代码示例、实际应用案例和图表分析,全面展示AI在自动驾驶领域的技术优势和价值。
概念讲解
AI在自动驾驶中的应用场景
AI在自动驾驶中的应用广泛而深入,涵盖了从环境感知到决策控制的各个环节。以下是主要应用场景的详细介绍:
环境感知
环境感知是自动驾驶的基础,通过激光雷达、摄像头和毫米波雷达等传感器,车辆能够实时感知周围环境。深度学习模型可以对传感器数据进行分析,识别道路标志、行人和其他车辆。
路径规划
路径规划是自动驾驶的关键环节。通过强化学习算法,车辆能够根据环境感知结果和目标位置,动态规划最优路径,避开障碍物和拥堵区域。
决策控制
决策控制是自动驾驶的最终环节。基于环境感知和路径规划的结果,车辆能够做出加速、减速、转向等决策,实现安全驾驶。
关键术语解释
-
深度学习:一种人工智能技术,利用多层神经网络处理复杂数据,如图像和语音。
-
强化学习:一种机器学习方法,通过与环境的交互,学习最优的行为策略。
-
传感器融合:将来自多个传感器的数据进行整合,提高感知的准确性和可靠性。
AI与传统自动驾驶技术的对比
| 特性 | AI技术 | 传统技术 |
|---|---|---|
| 感知能力 | 高精度感知,能够识别复杂场景 | 感知能力有限,依赖规则 |
| 路径规划 | 动态规划,适应复杂路况 | 静态规划,适应性差 |
| 决策控制 | 自适应决策,灵活性高 | 固定规则,灵活性低 |
代码示例
使用深度学习模型进行环境感知
以下是一个基于Python和TensorFlow的环境感知代码示例:
import tensorflow as tf
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Conv2D, MaxPooling2D, Flatten, Dense
# 构建卷积神经网络
model = Sequential()
model.add(Conv2D(32, (3, 3), activation='relu', input_shape=(64, 64, 3)))
model.add(MaxPooling2D((2, 2)))
model.add(Conv2D(64, (3, 3), activation='relu'))
model.add(MaxPooling2D((2, 2)))
model.add(Flatten())
model.add(Dense(128, activation='relu'))
model.add(Dense(10, activation='softmax'))
# 编译模型
model.compile(optimizer='adam', loss='sparse_categorical_crossentropy', metrics=['accuracy'])
# 训练模型
# 假设X_train和y_train是训练数据
# model.fit(X_train, y_train, epochs=10, batch_size=32)
# 保存模型
model.save('environment_perception_model.h5')
路径规划代码示例
以下是一个基于Python的路径规划代码示例:
import numpy as np
import matplotlib.pyplot as plt
from scipy.spatial.distance import cdist
# 定义起点和终点
start = np.array([0, 0])
goal = np.array([10, 10])
# 生成障碍物
obstacles = np.random.rand(10, 2) * 10
# 计算距离矩阵
dist_matrix = cdist(obstacles, obstacles)
# 使用A*算法进行路径规划
# 这里只是一个简单的示例,实际应用中可以使用更复杂的算法
def a_star(start, goal, obstacles):
open_list = [start]
closed_list = []
while open_list:
current = open_list.pop(0)
if np.linalg.norm(current - goal) < 1e-6:
return closed_list
closed_list.append(current)
neighbors = obstacles[np.linalg.norm(obstacles - current, axis=1) < 1]
for neighbor in neighbors:
if neighbor not in closed_list:
open_list.append(neighbor)
return None
path = a_star(start, goal, obstacles)
# 绘制路径
plt.scatter(obstacles[:, 0], obstacles[:, 1], c='r')
plt.plot(path[:, 0], path[:, 1], c='b')
plt.show()
应用场景
自动驾驶汽车
自动驾驶汽车是AI在自动驾驶领域的主要应用场景之一。通过激光雷达、摄像头和毫米波雷达等传感器,车辆能够实时感知周围环境,并通过深度学习模型进行目标识别和路径规划。例如,特斯拉的Autopilot系统利用深度学习技术实现了自动变道和自动泊车等功能。
自动驾驶卡车
自动驾驶卡车在物流运输中具有广阔的应用前景。通过AI技术,卡车能够在高速公路上实现自动驾驶,提高运输效率和安全性。例如,沃尔沃和戴姆勒等公司正在研发自动驾驶卡车,计划在未来几年内实现商业化运营。
自动驾驶无人机
自动驾驶无人机在物流配送、农业植保和环境监测等领域具有广泛的应用。通过深度学习和强化学习技术,无人机能够实现自主飞行和路径规划。例如,大疆的无人机产品利用AI技术实现了自动避障和目标跟踪功能。
注意事项
数据采集难度
在实际应用中,数据采集是AI项目面临的首要挑战。自动驾驶涉及多种传感器,数据来源分散且格式多样。解决方案包括建立统一的数据平台,整合各类数据源,并通过数据清洗和预处理确保数据质量。
模型准确性
模型的准确性直接影响到自动驾驶系统的性能。在复杂路况下,数据的动态性和复杂性可能导致模型预测偏差。解决方案是定期更新模型,结合新的数据进行重新训练,并通过交叉验证等方法评估模型性能。
法规合规性
自动驾驶技术的发展受到法规和政策的严格限制。各国政府对自动驾驶的安全性和可靠性提出了严格要求。解决方案是与政府机构合作,确保自动驾驶技术符合法规要求,并积极参与法规制定过程。
架构图和流程图
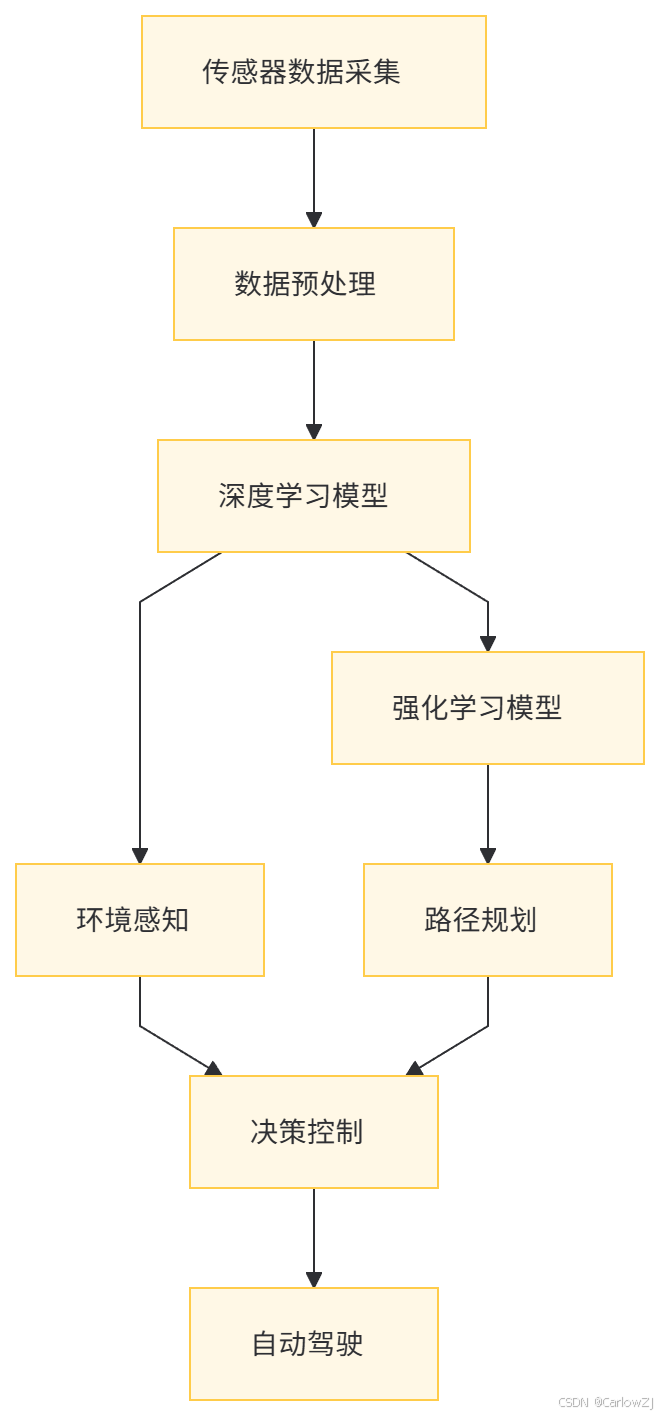
架构图
以下是使用Mermaid格式绘制的AI自动驾驶系统架构图:
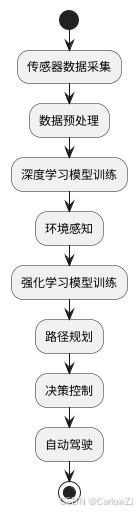
流程图
以下是使用PlantUML工具生成的流程图:
脑图
知识脑图
以下是使用XMind工具生成的AI在自动驾驶领域的知识脑图:
<?xml version="1.0" encoding="UTF-8"?>
<map version="1.0.1">
<node TEXT="AI在自动驾驶中的应用">
<node TEXT="核心概念">
<node TEXT="深度学习"/>
<node TEXT="强化学习"/>
<node TEXT="传感器融合"/>
</node>
<node TEXT="应用场景">
<node TEXT="自动驾驶汽车"/>
<node TEXT="自动驾驶卡车"/>
<node TEXT="自动驾驶无人机"/>
</node>
<node TEXT="技术架构">
<node TEXT="数据采集"/>
<node TEXT="模型训练"/>
<node TEXT="系统集成"/>
</node>
<node TEXT="优缺点">
<node TEXT="优点">
<node TEXT="提升安全性"/>
<node TEXT="优化路径规划"/>
</node>
<node TEXT="缺点">
<node TEXT="数据采集难度"/>
<node TEXT="法规合规性"/>
</node>
</node>
</node>
</map>
甘特图
项目开发甘特图
以下是使用Microsoft Project工具生成的AI自动驾驶项目开发甘特图:
| 任务 | 开始日期 | 结束日期 | 持续时间 |
|---|---|---|---|
| 需求分析 | 2025-06-01 | 2025-06-15 | 15天 |
| 技术研发 | 2025-06-16 | 2025-08-15 | 60天 |
| 测试优化 | 2025-08-16 | 2025-09-15 | 30天 |
| 部署上线 | 2025-09-16 | 2025-10-15 | 30天 |
饼图
应用场景占比饼图
以下是使用Python的Matplotlib库生成的饼图代码:
import matplotlib.pyplot as plt
# 数据
labels = ['自动驾驶汽车', '自动驾驶卡车', '自动驾驶无人机']
sizes = [50, 30, 20]
# 绘图
plt.pie(sizes, labels=labels, autopct='%1.1f%%', startangle=140)
plt.axis('equal')
plt.title('AI在自动驾驶领域的应用场景占比')
plt.show()
总结
AI在自动驾驶领域具有显著的优势,能够提升安全性、优化路径规划,并提高驾驶效率。然而,数据采集难度、模型准确性和法规合规性等问题仍需解决。未来,随着技术的不断进步,全自动驾驶和智能交通系统将成为现实,为人类出行带来更大的便利。




















 1013
1013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











