




这篇论文介绍了MobilEye的基于视觉的前车碰撞预警算法。
不去进行3D建模,直接去计算TTC(Time-to-Contact)。
情况一 相对速度恒定时
由相机模型的几何关系进行推理
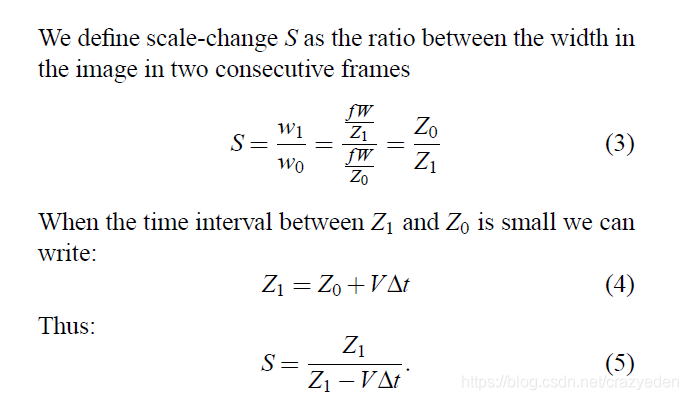
S表示时间间隔内同一物体连续两张图片的宽度比例。
表示连续两帧的时间差。
做这个实验是,需要的数据为,前后两帧检测到的物体在图片中宽度比值。
情况二 相对速度变化,存在加速度时

Z表示时间后二者的相对距离,<
 该论文聚焦于MobilEye的单摄像头前车碰撞预警系统,不依赖3D建模,通过计算Time-to-Contact (TTC)来实现。在相对速度恒定和存在加速度两种情况下,论文详细阐述了如何利用相机几何关系推导算法。关键在于通过连续帧中物体宽度比例变化求得TTC,并利用离散导数求解加速度,从而实现碰撞预警。验证算法需要真实目标的宽度变化比例和速度信息。
该论文聚焦于MobilEye的单摄像头前车碰撞预警系统,不依赖3D建模,通过计算Time-to-Contact (TTC)来实现。在相对速度恒定和存在加速度两种情况下,论文详细阐述了如何利用相机几何关系推导算法。关键在于通过连续帧中物体宽度比例变化求得TTC,并利用离散导数求解加速度,从而实现碰撞预警。验证算法需要真实目标的宽度变化比例和速度信息。
这篇论文介绍了MobilEye的基于视觉的前车碰撞预警算法。
不去进行3D建模,直接去计算TTC(Time-to-Contact)。
情况一 相对速度恒定时
由相机模型的几何关系进行推理
S表示时间间隔内同一物体连续两张图片的宽度比例。
表示连续两帧的时间差。
做这个实验是,需要的数据为,前后两帧检测到的物体在图片中宽度比值。
情况二 相对速度变化,存在加速度时
Z表示时间后二者的相对距离,<
 6028
6028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























