



完整代码文件见文末
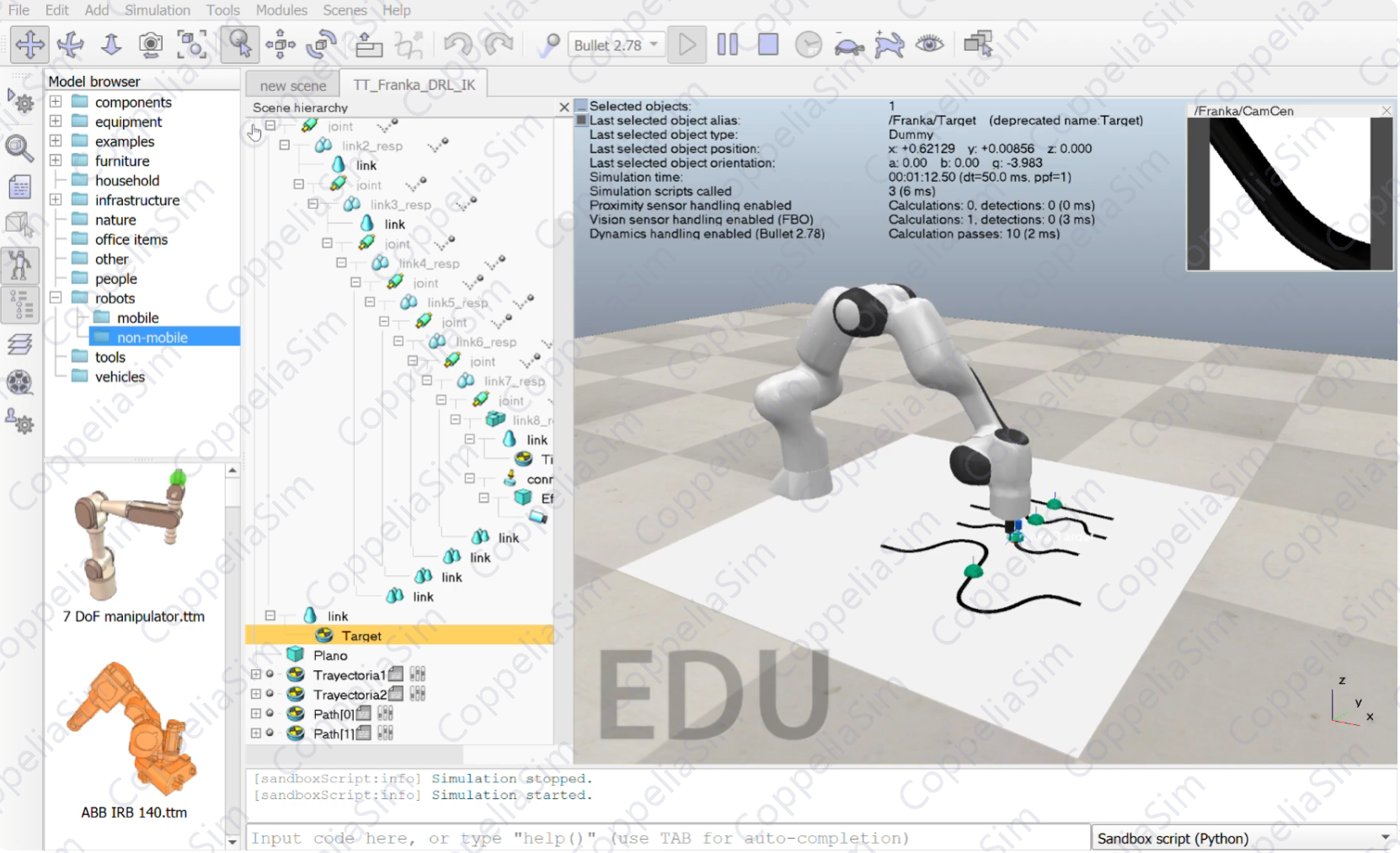
机器人操纵臂使用基于深度强化学习的控制方法,执行在CoppeliaSim仿真场景工作区内跟踪轨迹的任务。
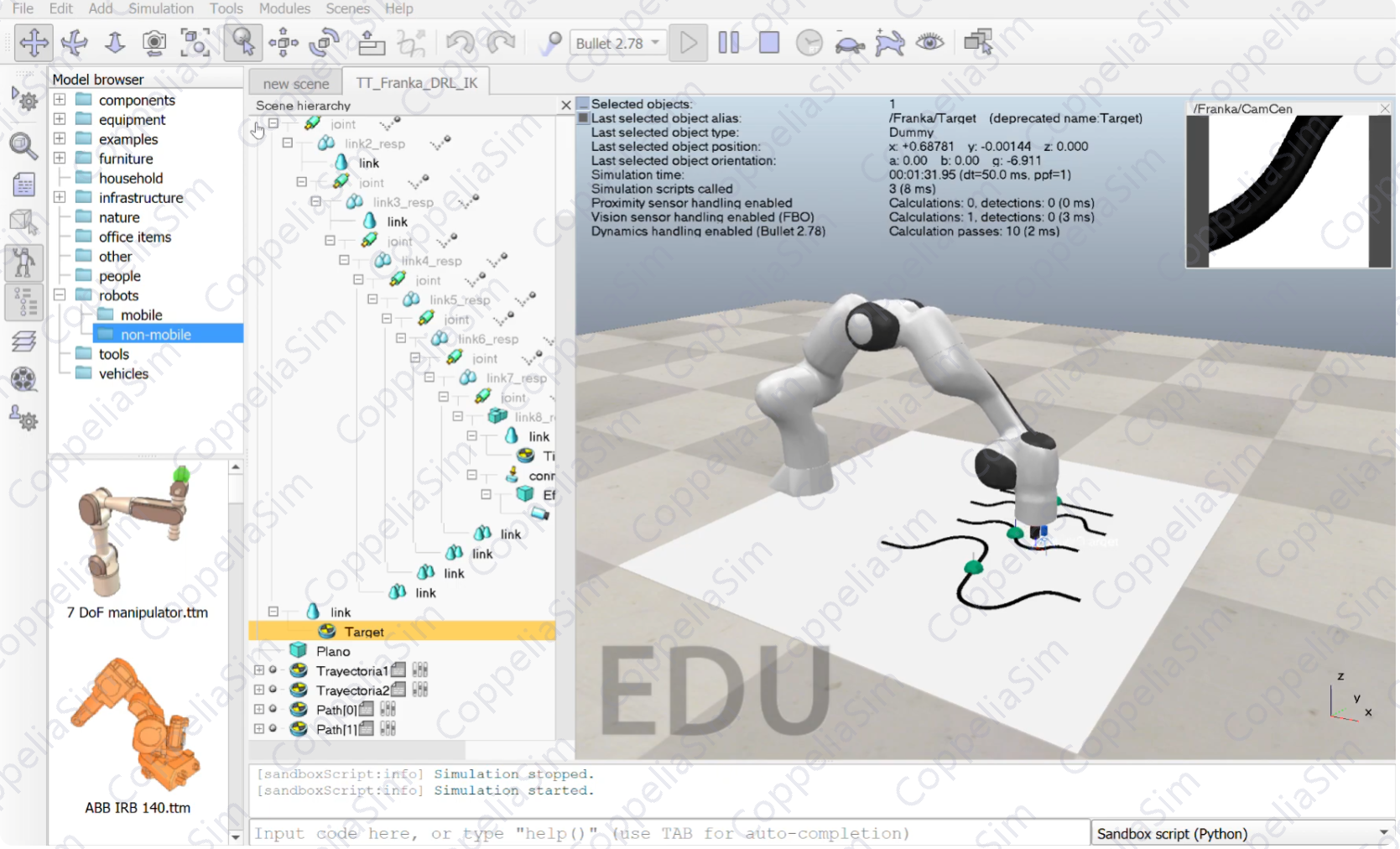
机器人操纵臂使用基于深度强化学习的控制方法,执行在CoppeliaSim仿真场景工作区内跟踪轨迹的任务。
 3644
4380
4619
1351
3644
4380
4619
1351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























