






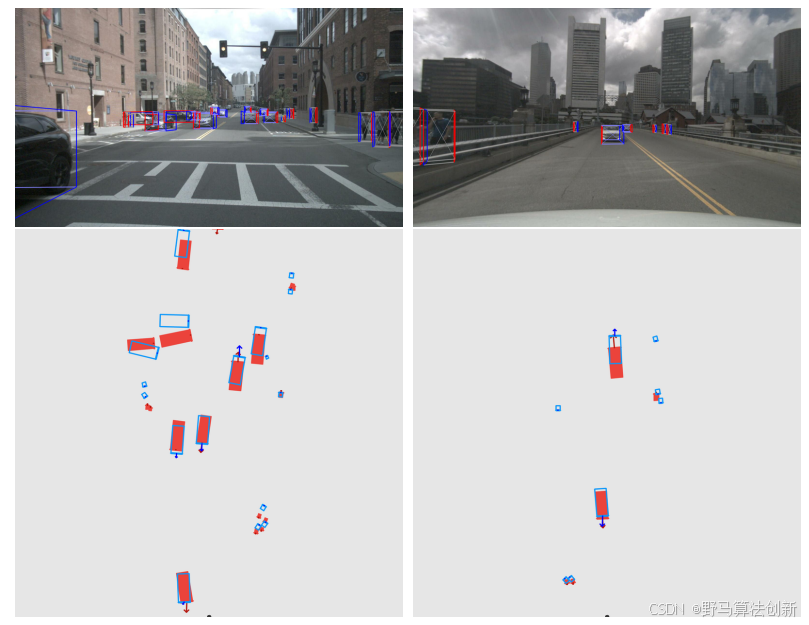
1.早期融合(EF)作为雷达点云投影到图像平面的一种方式。投影后的雷达点图像特征(默认包括:深度、x和z方向的速度分量及雷达散射截面(RCS)值)随后与RGB图像通道进行拼接,作为网络架构中基于图像的主干网络的新输入。EF增强了对相机传感器故障和复杂环境条件(如雨天/夜间/雾霾)的鲁棒性。
2.替代传统方法中通过选择与主干网络及主要头部检测结果最接近的雷达点进行关联的做法。输出一个人工雷达点r*,代表视锥体中的所有雷达点。训练为输出与该雷达点关联的边界框中心的深度以及相应的径向速度。输出随后作为新通道


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









