




基于RT-DETR算法的夜间交通车辆与行人目标检测:智能交通的未来
文末有完整代码数据集获取方式
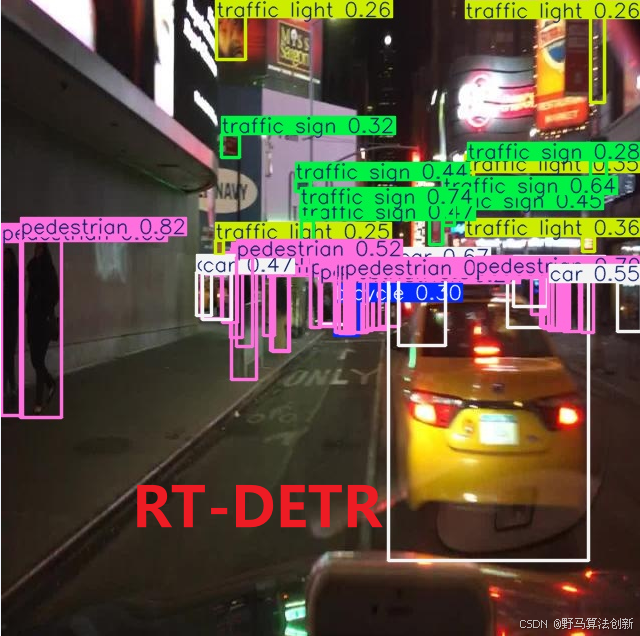
随着智能交通系统(ITS)的发展,实时、高效的交通监控成为了城市安全管理的重要一环。尤其是在夜间,低光照、复杂天气条件等因素使得传统的目标检测算法面临巨大的挑战,如何在夜间环境中准确地识别车辆和行人,成为智能交通系统中亟待解决的痛点。
痛点:夜间检测困难,传统方法效率低
在夜间,交通监控摄像头拍摄的图像普遍存在光照不足、噪声大、对比度低等问题。传统的基于特征提取的目标检测方法往往难以应对这些复杂的环境条件,导致以下痛点:
- 低光照环境下检测精度差:夜间的光照条件远不如白天清晰,传统的图像处理方法难以准确提取车辆和行人的特征,识别精度严重下降。
- 高噪声影响:低光照环境下的摄像头容易捕捉到较多噪声,影响目标检测算法的稳定性和准确性。
- 实时性要求高:交通监控系统需要对车辆和行人进行实时监控和处理,传统的目标检测方法往往计算量大,难以满足实时性要求。
这些痛点不仅影响了交通管理的效率,也带来了安全隐患。
解决方案:RT-DETR算法助力夜间目标检测
针对夜间交通监控中的种种挑战,基于RT-DETR(Real-Time Detection Transformer)算法的目标检测方法脱颖而出。RT-DETR是深度学习领域中最新的一项突破,它结合了Transformer模型和卷积神经网络(CNN),能够高效、精确地进行目标检测,尤
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 6071
6071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











