






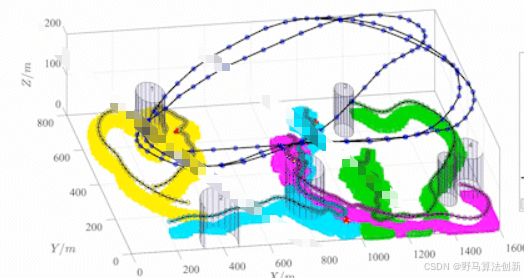
在此基础上,提出了一种跳跃网格决策方法,以满足无人机的机动性约束;开发了一种参数动态选择方法,使得搜索决策更能响应任务需求;并设计了一种低带宽的搜索信息传输方法。该方法能够使无人机快速发现目标,应对各种约束和突发情况,并做出自适应决策,显著提高了复杂、动态和未知环境中搜索任务的鲁棒性。通过多个搜索场景进行测试,仿真结果表明,与同质无人机相比,异构无人机的协同搜索性能得到了显著提升。
在此基础上,提出了一种跳跃网格决策方法,以满足无人机的机动性约束;开发了一种参数动态选择方法,使得搜索决策更能响应任务需求;并设计了一种低带宽的搜索信息传输方法。该方法能够使无人机快速发现目标,应对各种约束和突发情况,并做出自适应决策,显著提高了复杂、动态和未知环境中搜索任务的鲁棒性。通过多个搜索场景进行测试,仿真结果表明,与同质无人机相比,异构无人机的协同搜索性能得到了显著提升。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























