







 本文介绍了边界跟踪中的内边界跟踪算法,主要用于区域已分出但边界未知的情况。算法分为四步,包括边界初始化、方向调整、闭合空间判断和边界点删除。对于一些细节,如奇偶性和方向调整的具体原理,仍有待深入理解。
本文介绍了边界跟踪中的内边界跟踪算法,主要用于区域已分出但边界未知的情况。算法分为四步,包括边界初始化、方向调整、闭合空间判断和边界点删除。对于一些细节,如奇偶性和方向调整的具体原理,仍有待深入理解。
边界跟踪:内边界跟踪算法解释
边界跟踪是基于边缘的分割常用方法之一,用于区域已分出(二值或已标注),但边界未知的情况。分为内边界与外边界。内边界为区域的一个子集,外边界不是区域的一个子集。
内边界跟踪算法具体的实施方法比较明确,但在学习的时候感觉稍微有点抽象,结合自己的理解拓展一下。
具体算法:
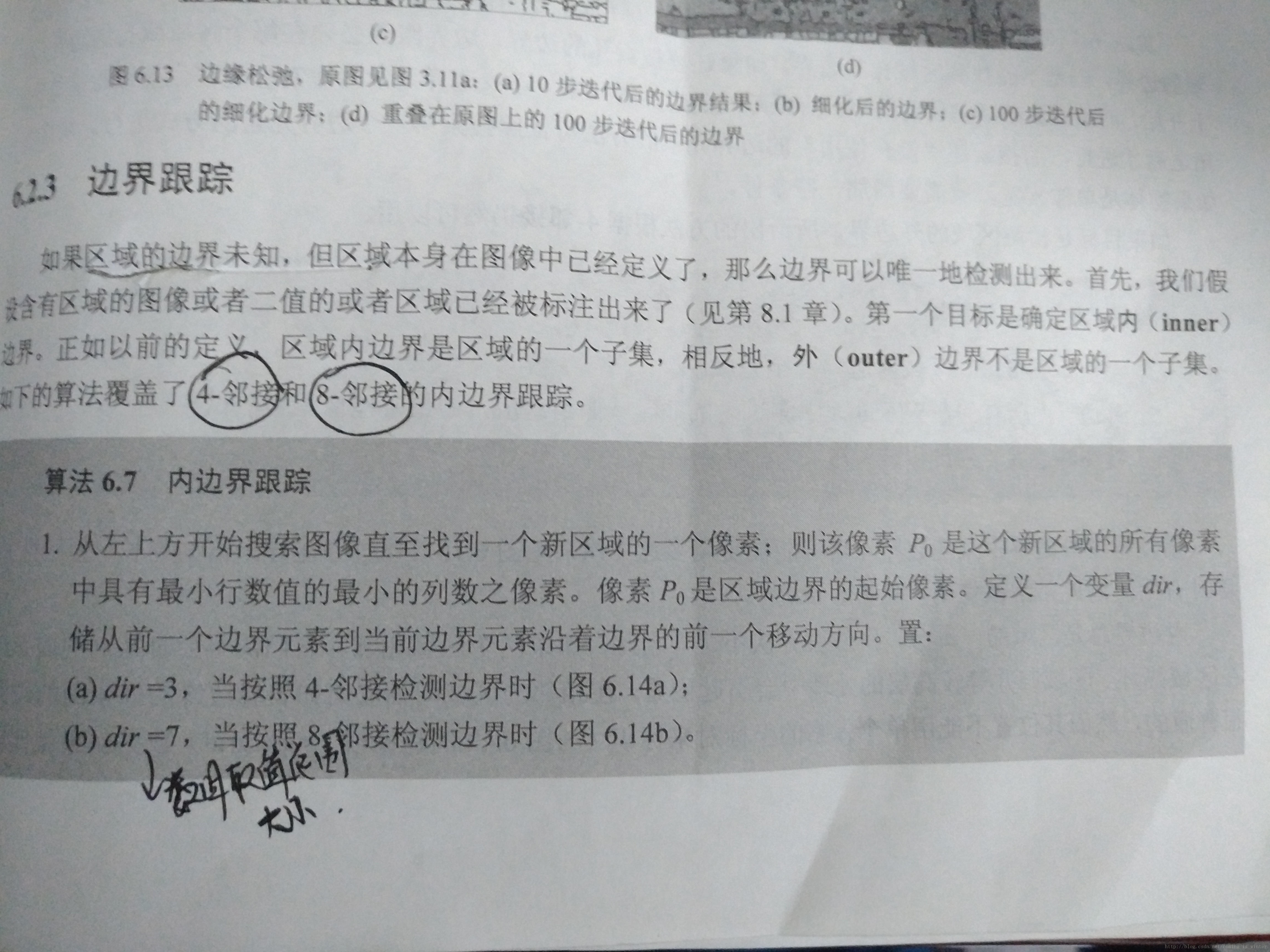
图1
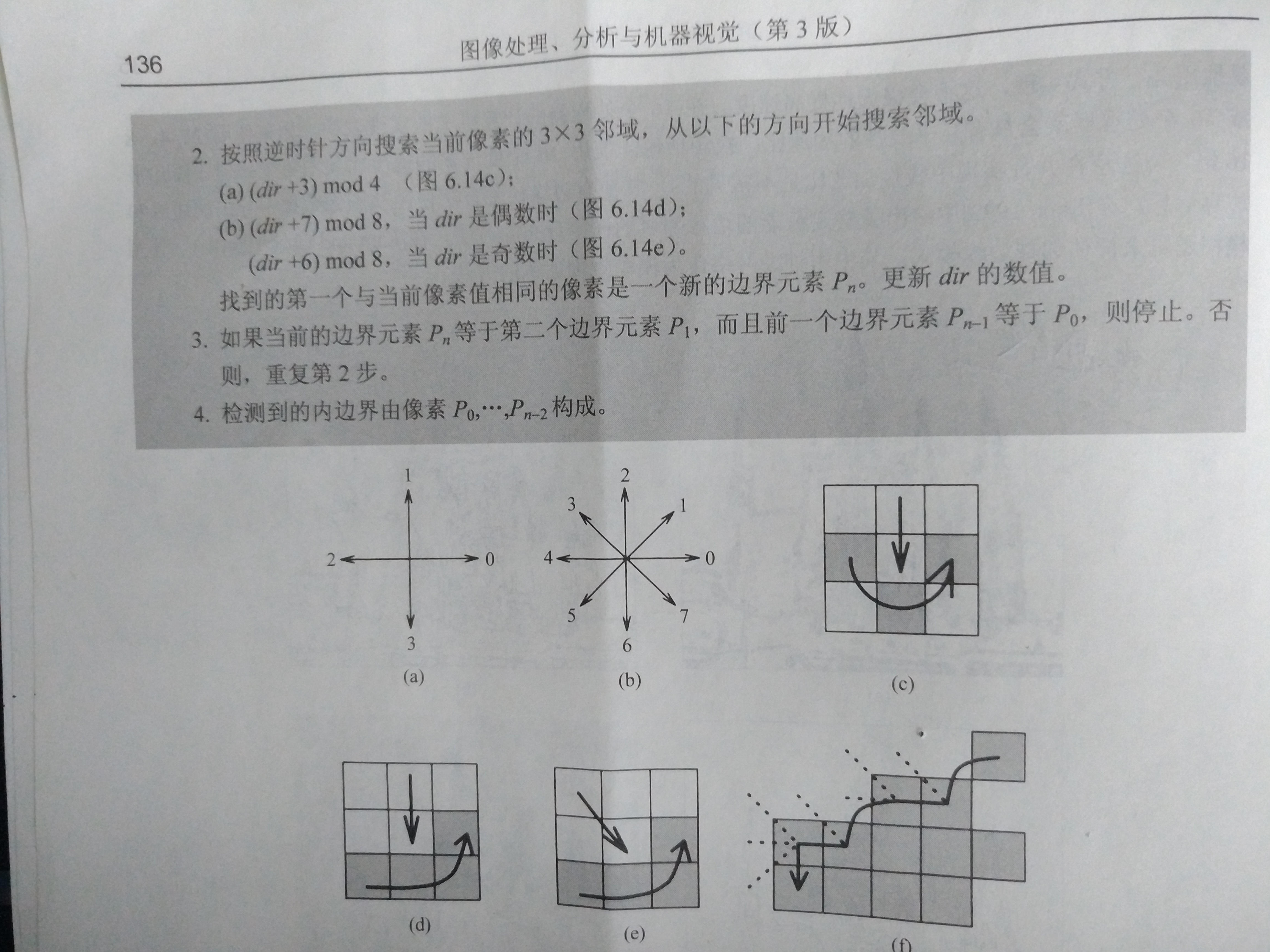
图2
具体有四步,以上图片中包含四邻域与八邻域,下面主要以以八邻域为例,四邻域原理相似。
第一步中图像处理是以整个图片的最左上角为坐标原点(0,0),所以最靠近左上角的P0为最小行数与最小列数之像素。定义的dir为边界移动的方向,具体为八邻域中的八个方向(0,1,2,3,4,5,6,7)中的一个(如图2中的(b)图),此时默认初始值为7(右下方向)。
第二步中先判断dir的奇偶性(默认值为7),然后对dir进行计算更改(就是根据上下文调整邻域扫描的初始方向))进行下一轮边界扫描。具体操作看图,画的不是很好,有点乱。
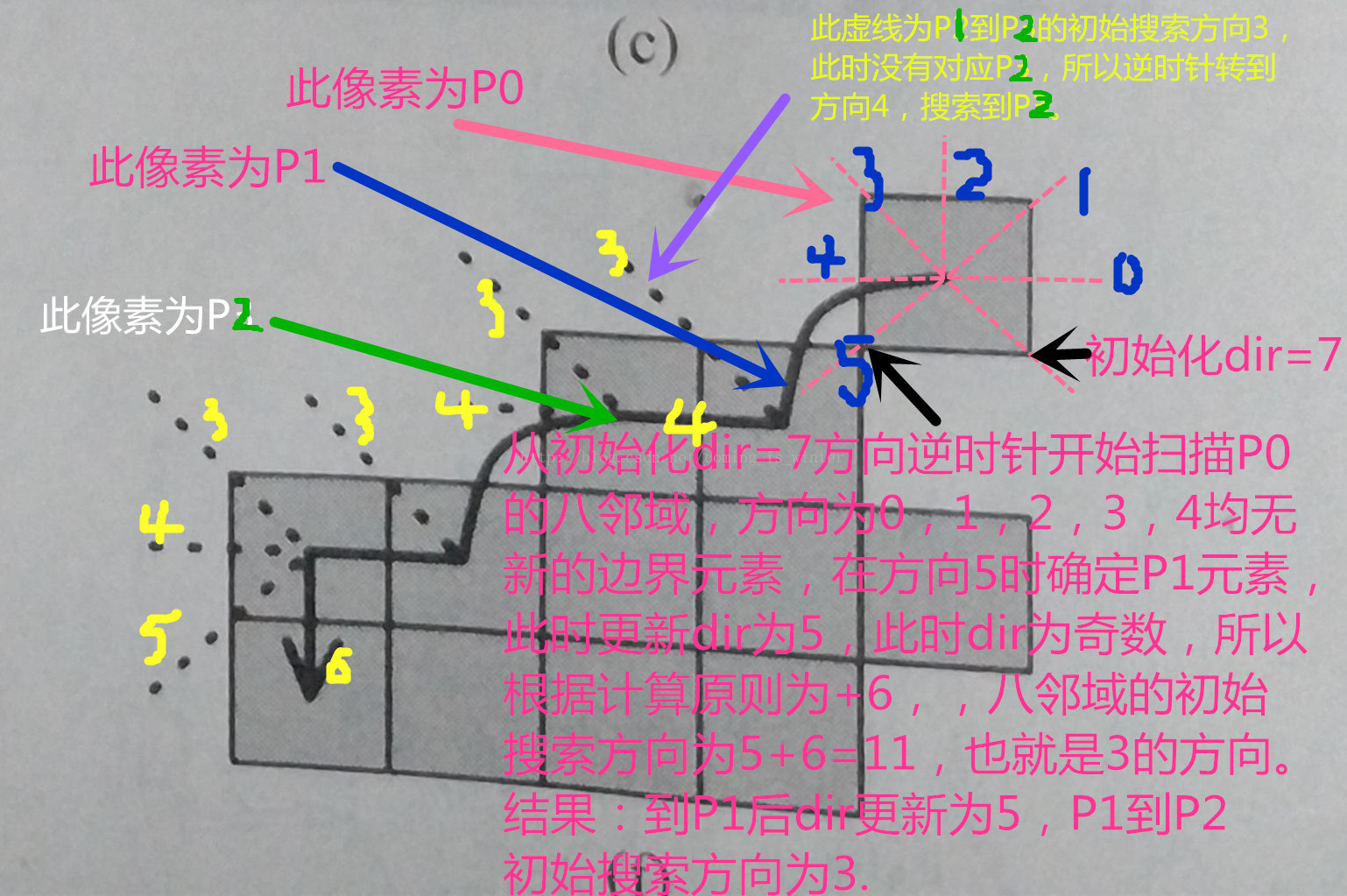
这里的奇偶判断及为何是+6,+7具体原理尚未能有效想明白,有待进一步学习。
第三步比较好理解边界是一个闭合空间,搜索到首尾相接时即结束。
第四步及将计算了两遍的Pn-1与Pn删除,最后边界为P0到Pn-2。
水平有限,理解可能有误,加之文笔不好,凑合看哈。
PS:后边发现有一个不确定的地方,搜索P0的时候dir是默认的7还是先判断dir的奇偶性再按第二步的步骤进行呢?这里先按初始7计算。
参考文献:
《图像处理、分析与机器视觉(第三版)》 作者 :Milan Sonka、艾海舟。


















 5849
5849

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











