 广播机制与矩阵乘法详解
广播机制与矩阵乘法详解




这里是逐元素运算的广播规则,最后还有矩阵乘法的广播规则介绍,注意区分概念。
广播机制(broadcasting)使得不同维度的张量在进行逐元素运算(如加减乘除)时能够自动扩展为兼容的形状。
从右到左对齐维度规则是指:在操作两个张量时,从它们的形状数组的最后一个维度开始比较,逐步向前进行匹配。这种匹配方式适用于任意数量的维度。
详细规则
广播的执行过程
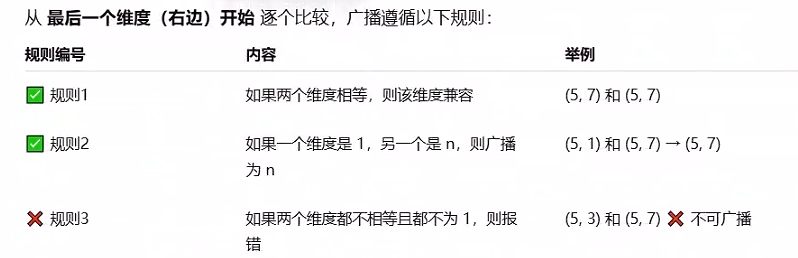
1️⃣ 从最后一个维度开始对齐。
2️⃣ 按上面三条规则检查每个维度是否可广播。
3️⃣ 缺少的高维在前面补 1。
4️⃣ 广播的结果形状是对应维度的最大值。
规则解析
-
从右到左比较:
对两个张量的形状,从最后一维开始,逐个比较每一维的大小。
- 匹配条件:
-
维度相等
-
某个张量的当前维度为 1(可以通过广播扩展匹配)。
-
某个张量缺失该维度(会被认为是 1)。
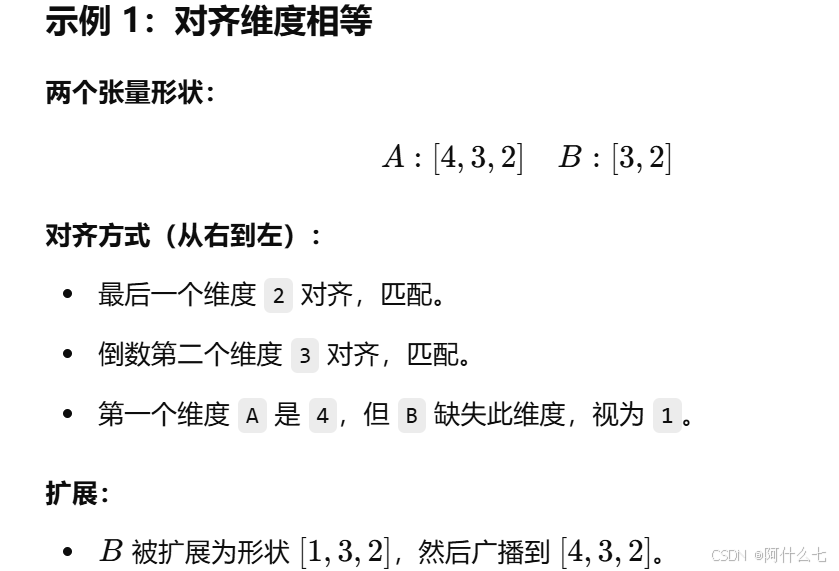
扩展:
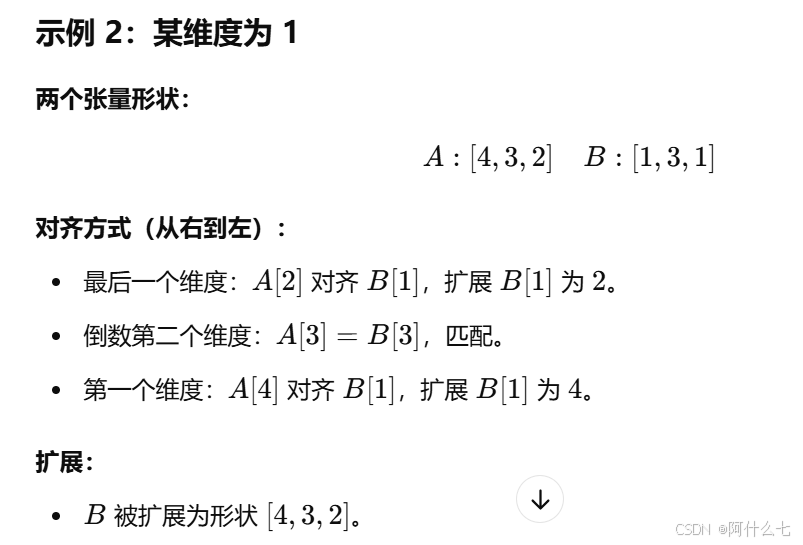
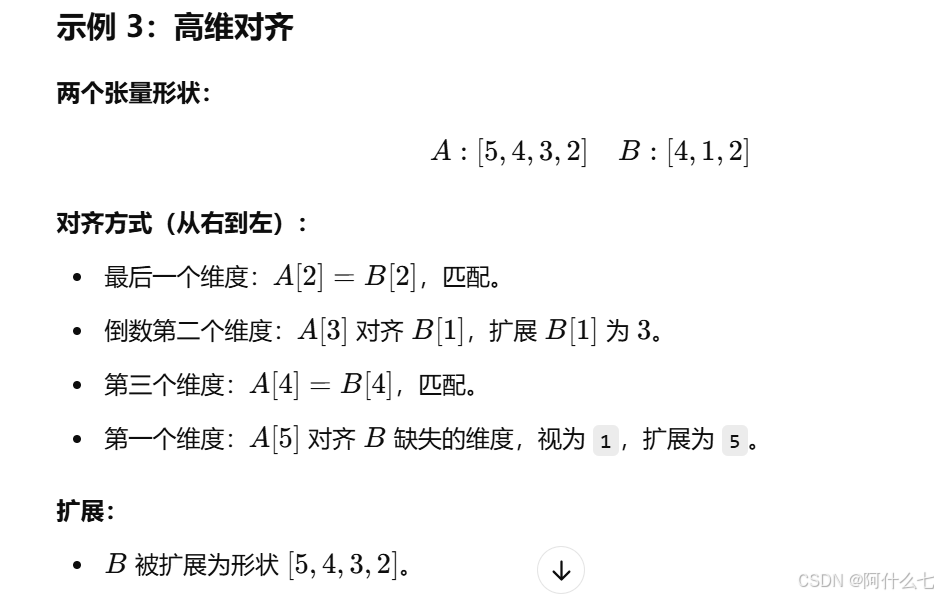
若某个张量在当前维度为 1,则扩展为另一个张量的大小。
若某个张量缺少某维度,则在操作中隐式补充 1 并扩展为另一个张量的大小。
在DeepFM的代码中,embedding向量与特征值相乘时用到广播机制, 其含义:
广播是指在不同形状的张量之间进行逐元素操作时,TensorFlow 自动扩展较小的张量以匹配较大张量的形状的过程。这样可以避免显式复制数据,提高计算效率。
# model embeddings = [batch_size, field_size, embedding_size]
self.embeddings = tf.nn.embedding_lookup(self.weights['feature_embeddings'], self.feat_index) # (batch_size、field_size、embedding_size)
feat_value = tf.reshape(self.feat_value, shape=[-1, self.field_size, 1]) # -1 让 TensorFlow 自动确定第一个维度的大小,
# 以保证总的元素数量不变。-1(N)表示样本数量,
# self.field_size(F)表示特征域数量
# print(feat_value.shape)
# (batch_size、field_size、embedding_size)
self.embeddings = tf.multiply(self.embeddings, feat_value) # 逐元素相乘,內积 tf.multiply支持广播机制
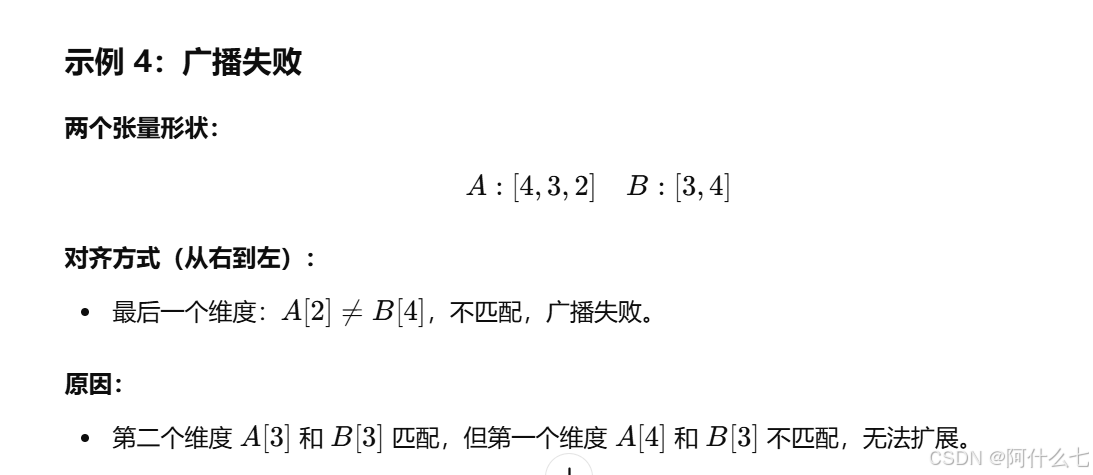
示例:
self.feat_value 的形状为 [2, 3],其中 batch_size=2,field_size=3:
self.feat_value = [
[1.0, 2.0, 3.0],
[4.0, 5.0, 6.0]
]
self.embeddings 的形状为 [2, 3, 8],其中 batch_size=2,field_size=3,embedding_size=8:
self.embeddings = [
[
[0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8],
[0.9, 1.0, 1.1, 1.2, 1.3, 1.4, 1.5, 1.6],
[1.7, 1.8, 1.9, 2.0, 2.1, 2.2, 2.3, 2.4]
],
[
[2.5, 2.6, 2.7, 2.8, 2.9, 3.0, 3.1, 3.2],
[3.3, 3.4, 3.5, 3.6, 3.7, 3.8, 3.9, 4.0],
[4.1, 4.2, 4.3, 4.4, 4.5, 4.6, 4.7, 4.8]
]
]
在将 self.feat_value 调整形状后:
self.feat_value = tf.reshape(self.feat_value, shape=[-1, self.field_size, 1])
调整后的 self.feat_value 的形状为 [2, 3, 1]:
self.feat_value = [
[
[1.0],
[2.0],
[3.0]
],
[
[4.0],
[5.0],
[6.0]
]
]
当与 self.embeddings 进行逐元素相乘时:
self.embeddings = tf.multiply(self.embeddings, self.feat_value)
结果将是:
self.embeddings = [
[
[0.1 * 1.0, 0.2 * 1.0, 0.3 * 1.0, 0.4 * 1.0, 0.5 * 1.0, 0.6 * 1.0, 0.7 * 1.0, 0.8 * 1.0],
[0.9 * 2.0, 1.0 * 2.0, 1.1 * 2.0, 1.2 * 2.0, 1.3 * 2.0, 1.4 * 2.0, 1.5 * 2.0, 1.6 * 2.0],
[1.7 * 3.0, 1.8 * 3.0, 1.9 * 3.0, 2.0 * 3.0, 2.1 * 3.0, 2.2 * 3.0, 2.3 * 3.0, 2.4 * 3.0]
],
[
[2.5 * 4.0, 2.6 * 4.0, 2.7 * 4.0, 2.8 * 4.0, 2.9 * 4.0, 3.0 * 4.0, 3.1 * 4.0, 3.2 * 4.0],
[3.3 * 5.0, 3.4 * 5.0, 3.5 * 5.0, 3.6 * 5.0, 3.7 * 5.0, 3.8 * 5.0, 3.9 * 5.0, 4.0 * 5.0],
[4.1 * 6.0, 4.2 * 6.0, 4.3 * 6.0, 4.4 * 6.0, 4.5 * 6.0, 4.6 * 6.0, 4.7 * 6.0, 4.8 * 6.0]
]
]
广播机制使得 self.feat_value 的形状 [batch_size, field_size, 1] 可以与 self.embeddings 的形状 [batch_size, field_size, embedding_size] 进行逐元素相乘,从而无需显式地复制 self.feat_value 的数据。这提高了计算的效率和内存的利用率。
矩阵乘法广播规则 pytorch.matmul
torch.matmul 的广播规则更复杂一些。
因为它不是逐元素操作,而是矩阵乘法,它会自动把前面的维度(即 batch 维度)广播。
记忆口诀:
在 matmul 中:
最后两维做矩阵乘法;
其余前面所有维度自动广播。
假设:
query.shape = [B, H, L, D]
key.shape = [B, H, L, D]
执行:
scores = torch.matmul(query, key.transpose(-2, -1))
🔍 分析逐步广播过程:
1️⃣ 先看矩阵相乘的“核心两维”:
query 的最后两维是 [L, D]
key.transpose(-2, -1) 的最后两维是 [D, L]
→ 这两维完全匹配矩阵乘法规则:
(L, D) @ (D, L) → 结果是 (L, L)。
2️⃣ 再看前面的批次维度 [B, H]
两个张量在这两维上完全一致,PyTorch 会认为它们是batch维度。
对于每个 [B, H] 的组合,独立执行一次矩阵乘法。
3️⃣ 所以,最终 scores 的形状是:
[B, H, L, L]
也就是说:
👉 每个 batch、每个 head 都会得到一个自己的 [L, L] 注意力矩阵。
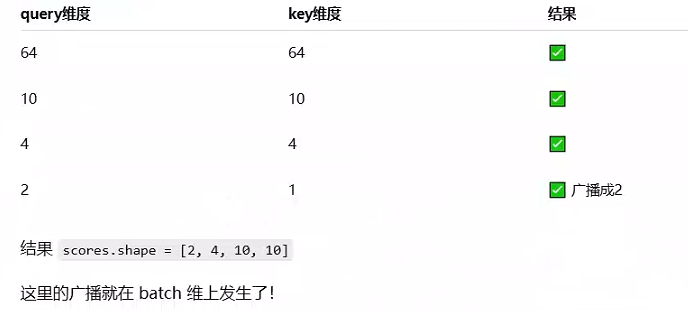
💡 四、如果前面的批次维不同怎么办?
假设:
query.shape = [2, 4, 10, 64]
key.shape = [1, 4, 10, 64]
从右往左比较:

















 2326
2326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









