




在agv公司实习,需学习cartographer算法。
参照大佬帖子Cartographer源码阅读_预准备 - 知乎
本贴仅作为记录自己学习cartographer源码的过程,笔记,感想。
cartographer代码主要包括两部分 cartographer_ros,cartographer,以及一个进行非线性优化的库ceres-solver。cartographer_ros是基于ros的通信机制,获取传感器的数据并转换成cartographer内定义的格式传递给cartographer处理。可以理解为基于cartographer的上层应用,对cartographer进行了一层ROS接口的封装。
代码整体框架:
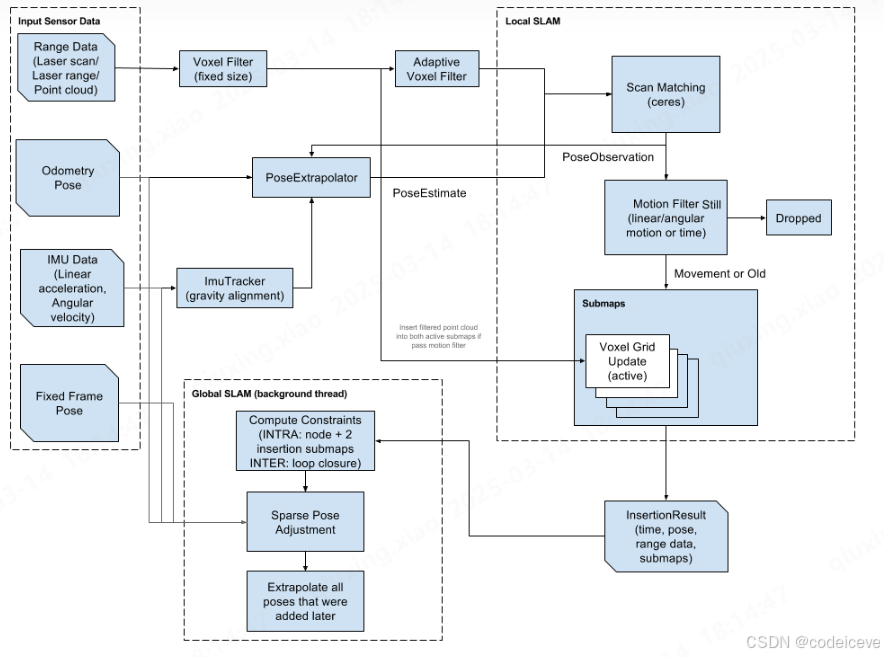
算法大致分为三个部分,local slam(前端),Global SLAM(后端),回环检测LoopClosure。
Local SLAM部分任务是建立子图Submaps,但前端建图会有部分建图误差,且随着时间累计。该部分的参数定义见/src/cartographer/configuration_files/trajectory_builder_2d.lua和/src/cartographer/configuration_files/trajectory_builder_3d.lua中。
Global SLAM部分主要任务是进行回环检测,采用BBA,Branch-and-Bound Approach (BBA)的方法来解决。具体方法见论文Real-Time Loop Closure in 2D LIDAR SLAM。在3Dladar中,该部分还根据IMU惯导的数据找到重力的方向。对BBA算法的理解:搜索窗口表达成一棵树的形式,树上每一个树枝就是这颗树干节点所有解可能性的划分,而树干对每个树枝都有一个上限得分,当有一个解比子节点(树枝)的得分高时,说明这个树枝不是最优解,就剪掉这个树枝,从而大大加快解题速度。并且在实际问题中,大部分分支的得分是非常低的,通过阈值就剪掉了很多分支。该种方法拿存储空间换时间效率,因为需要预先计算并存储子图每个pixel的得分值,当输入一个节点时,直接寻找即可,所以这个程序很吃内存。
总而言之,前端负责生成较好的子图,而后端将不同的子图以最匹配的位姿合在一起成为总图。
cartographer运行后系统ROS节点,topic,service等情况如下图: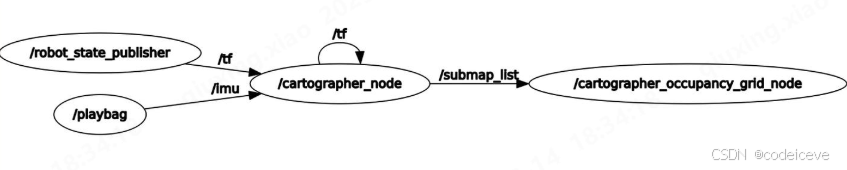
cartographer_node订阅传感器数据,运行算法,生成submap_list, 而cartographer_occupancy_grid_node则订阅了submap_list,并发布栅格地图。
cartographer_node
|===@订阅的Topic
|---------scan (sensors_msgs/LaserScan): 解释:传感器数据
|---------echoes (sensors_msgs/Mu 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









