




参考资料:
整个源码主要围绕着Transformers库中的model_t5展开,也默认大家都已经熟悉了transformer的基本原理,知道了像GPT和Bert这些为代表的decoder和encoder架构,这里我们就介绍另一个流派的代表:基于encoder-decoder架构的T5模型
1.代码文件框架:
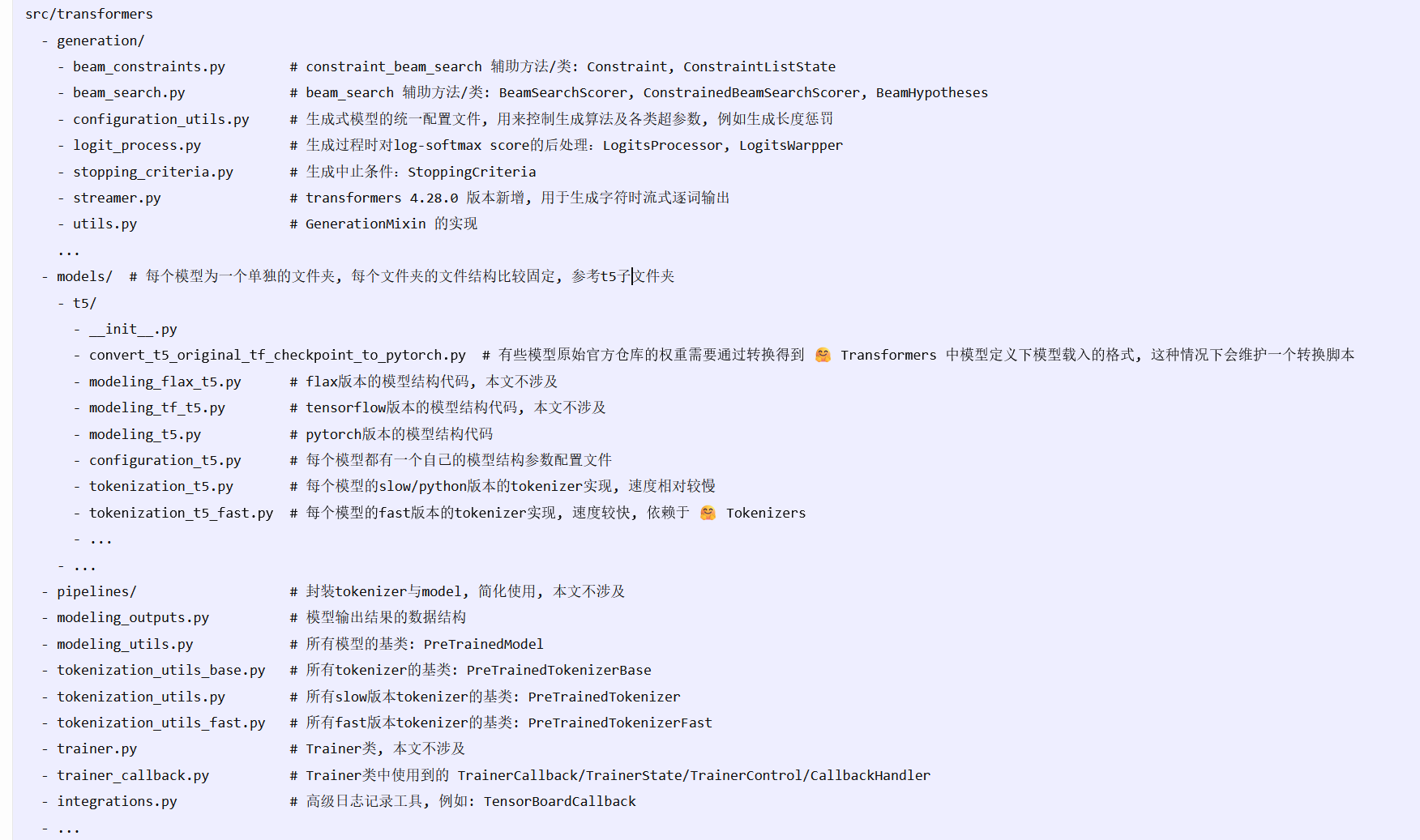
这里主要围绕modeling_t5展开(基本原理强力推荐上面的博客,下面主要是对官方代码的解读):
class T5LayerNorm(nn.Module):
def __init__(self, hidden_size, eps=1e-6):
"""
Construct a layernorm module in the T5 style. No bias and no subtraction of mean.
"""
super().__init__()
self.weight = nn.Parameter(torch.ones(hidden_size))
self.variance_epsilon = eps
def forward(self, hidden_states):
variance = hidden_states.to(torch.float32).pow(2).mean(-1, keepdim=True)
hidden_states = hidden_states * torch.rsqrt(variance + self.variance_epsilon)
# convert into half-precision if necessary
if self.weight.dtype in [torch.float16, torch.bfloat16]:
hidden_states = hidden_states.to(self.weight.dtype)
return self.weight * hidden_states层归一化:hidden_states(B,L,C),return (B,L,C)
class T5DenseActDense(nn.Module):
def __init__(self, config: T5Config):
super().__init__()
self.wi = nn.Linear(config.d_model, config.d_ff, bias=False)
self.wo = nn.Linear(config.d_ff, config.d_model, bias=False)
self.dropout = nn.Dropout(config.dropout_rate)
self.act = ACT2FN[config.dense_act_fn]
def forward(self, hidden_states):
hidden_states = self.wi(hidden_states)
hidden_states = self.act(hidden_states)
hidden_states = self.dropout(hidden_states)
if (
isinstance(self.wo.weight, torch.Tensor)
and hidden_states.dtype != self.wo.weight.dtype
and self.wo.weight.dtype != torch.int8
):
hidden_states = hidden_states.to(self.wo.weight.dtype)
hidden_states = self.wo(hidden_states)
return hidden_states主要作为FFN中的一部分,输入和输出维度没有变化,用于深层次加工和信息提炼
class T5DenseGatedActDense(nn.Module):
def __init__(self, config: T5Config):
super().__init__()
self.wi_0 = nn.Linear(config.d_model, config.d_ff, bias=False)
self.wi_1 = nn.Linear(config.d_model, config.d_ff, bias=False)
self.wo = nn.Linear(config.d_ff, config.d_model, bias=False)
self.dropout = nn.Dropout(config.dropout_rate)
self.act = ACT2FN[config.dense_act_fn]
def forward(self, hidden_states):
hidden_gelu = self.act(self.wi_0(hidden_states))
hidden_linear = self.wi_1(hidden_states)
hidden_states = hidden_gelu * hidden_linear
hidden_states = self.dropout(hidden_states)
# To make 8bit quantization work for google/flan-t5-xxl, self.wo is kept in float32.
# See https://github.com/huggingface/transformers/issues/20287
# we also make sure the weights are not in `int8` in case users will force `_keep_in_fp32_modules` to be `None``
if (
isinstance(self.wo.weight, torch.Tensor)
and hidden_states.dtype != self.wo.weight.dtype
and self.wo.weight.dtype != torch.int8
):
hidden_states = hidden_states.to(self.wo.weight.dtype)
hidden_states = self.wo(hidden_states)
return hidden_states这个和前面一个多了门控机制,也就是wi_0的输出当作模型重要性权重来控制wi_1,输入输出维度依旧不变
class T5LayerFF(nn.Module):
def __init__(self, config: T5Config):
super().__init__()
if config.is_gated_act:
self.DenseReluDense = T5DenseGatedActDense(config)
else:
self.DenseReluDense = T5DenseActDense(config)
self.layer_norm = T5LayerNorm(config.d_model, eps=config.layer_norm_epsilon)
self.dropout = nn.Dropout(config.dropout_rate)
def forward(self, hidden_states):
forwarded_states = self.layer_norm(hidden_states)
forwarded_states = self.DenseReluDense(forwarded_states)
hidden_states = hidden_states + self.dropout(forwarded_states)
return hidden_statesFFN,输入输出维度不变,用于特征融合。
下面介绍最重要的注意力机制:
1.初始化:
def __init__(
self,
config: T5Config,
has_relative_attention_bias=False,
layer_idx: Optional[int] = None,
):
super().__init__()
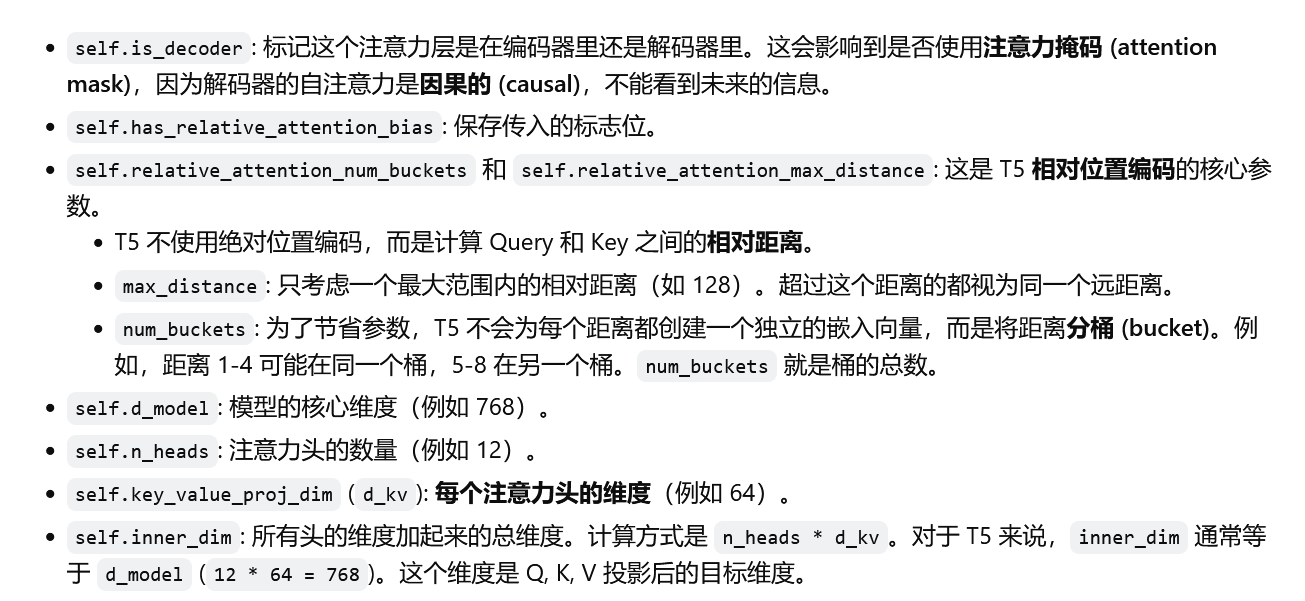
self.is_decoder = config.is_decoder
self.has_relative_attention_bias = has_relative_attention_bias
self.relative_attention_num_buckets = config.relative_attention_num_buckets
self.relative_attention_max_distance = config.relative_attention_max_distance
self.d_model = config.d_model
self.key_value_proj_dim = config.d_kv
self.n_heads = config.num_heads
self.dropout = config.dropout_rate
self.inner_dim = self.n_heads * self.key_value_proj_dim
self.layer_idx = layer_idx
if layer_idx is None and self.is_decoder:
logger.warning_once(
f"Instantiating a decoder {self.__class__.__name__} without passing `layer_idx` is not recommended and "
"will to errors during the forward call, if caching is used. Please make sure to provide a `layer_idx` "
"when creating this class."
)
# Mesh TensorFlow initialization to avoid scaling before softmax
self.q = nn.Linear(self.d_model, self.inner_dim, bias=False)
self.k = nn.Linear(self.d_model, self.inner_dim, bias=False)
self.v = nn.Linear(self.d_model, self.inner_dim, bias=False)
self.o = nn.Linear(self.inner_dim, self.d_model, bias=False)
if self.has_relative_attention_bias:
self.relative_attention_bias = nn.Embedding(self.relative_attention_num_buckets, self.n_heads)
self.pruned_heads = set()
self.gradient_checkpointing = False
下面是各个参数的解释:

2.relative_position_bucket 函数
def _relative_position_bucket(relative_position, bidirectional=True, num_buckets=32, max_distance=128):
relative_buckets = 0
if bidirectional:
num_buckets //= 2
relative_buckets += (relative_position > 0).to(torch.long) * num_buckets
relative_position = torch.abs(relative_position)
else:
relative_position = -torch.min(relative_position, torch.zeros_like(relative_position))
# now relative_position is in the range [0, inf)
# half of the buckets are for exact increments in positions
max_exact  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1491
1491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









