 多PC协同的CANoe MultiCANoe高级应用
多PC协同的CANoe MultiCANoe高级应用




 本文介绍了Vector CANoe的进阶功能MultiCANoe,如何实现多个CANoe工程跨计算机独立运行,通过时间同步进行ECU联合仿真,降低硬件负载,节省许可证成本。讲解了配置步骤、网络连接、时间同步和系统变量同步的关键要素。
本文介绍了Vector CANoe的进阶功能MultiCANoe,如何实现多个CANoe工程跨计算机独立运行,通过时间同步进行ECU联合仿真,降低硬件负载,节省许可证成本。讲解了配置步骤、网络连接、时间同步和系统变量同步的关键要素。
前言
今天带大家认识一个CANoe的进阶功能,这个功能可以使多个CANoe工程同时运行在不同的计算机上,每个CANoe工程都有自己的独立界面,通过同步线进行时间同步,这个功能就是Multi CANoe。它的时间同步示意图如下:
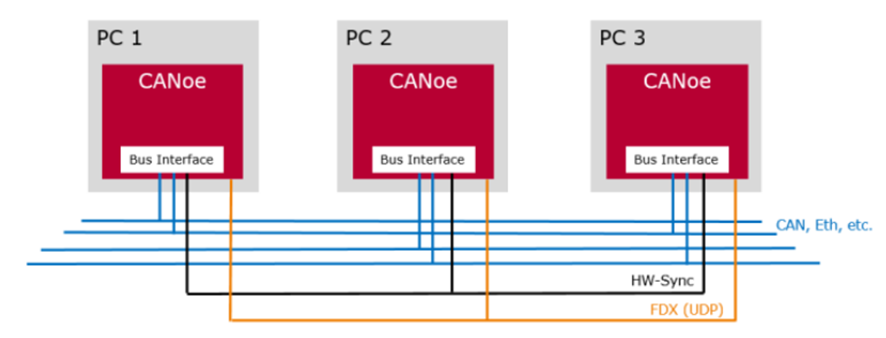
图1 Multi CANoe的同步示意图
看到这个功能我们第一时间可以想到的是ECU的联合仿真,这个过程涉及到大量信号的交互,有了Multi CANoe之后,一个很大的工程可以放在多个电脑上运行,从而有效降低电脑负载。除此之外,使用一台主机就可以控制所有设备上CANoe的运行,这大大简化了多设备联调的操作。Multi CANoe还可以为您节约资金,本来多设备联调需要每台设备上都集成CANoe相关license,如果使用Multi CANoe的话,从机上只需要集成Slave license即可,这使得整个系统的价格大大降低。
Multi CANoe的几个重要特性
1.数据交互
Multi CANoe使用windows IP堆栈进行数据连接,使用者需要确保所有电脑都连接在同样的IPv4子网中,并用网线连接起来。下图是两台计算机的IPv4地址,左边是主机,右边是从机。
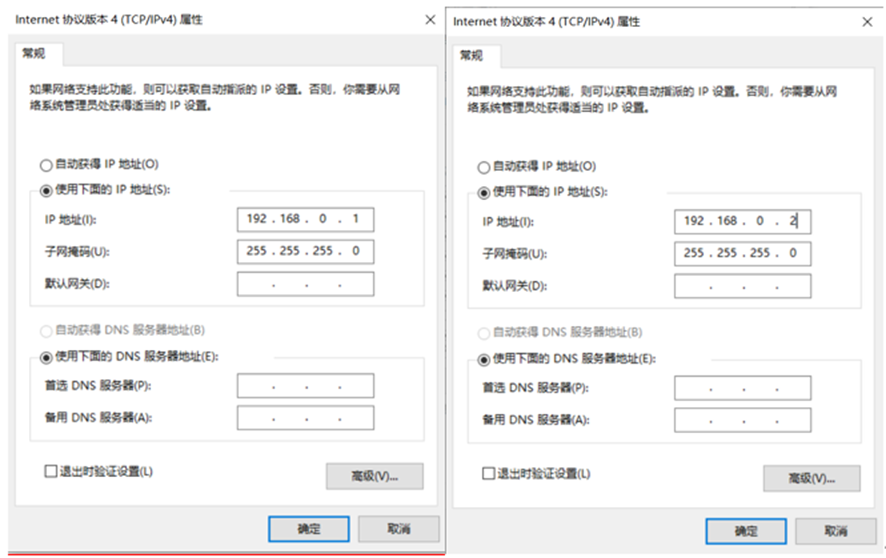
图2 主机/从机IPv4地址配置
& 安微干部培训 http://ah.ganxun.cn/ nbsp;
在Windows网卡配置正确后,可以在Multi CANoe Settings对话框中使用IP地址。
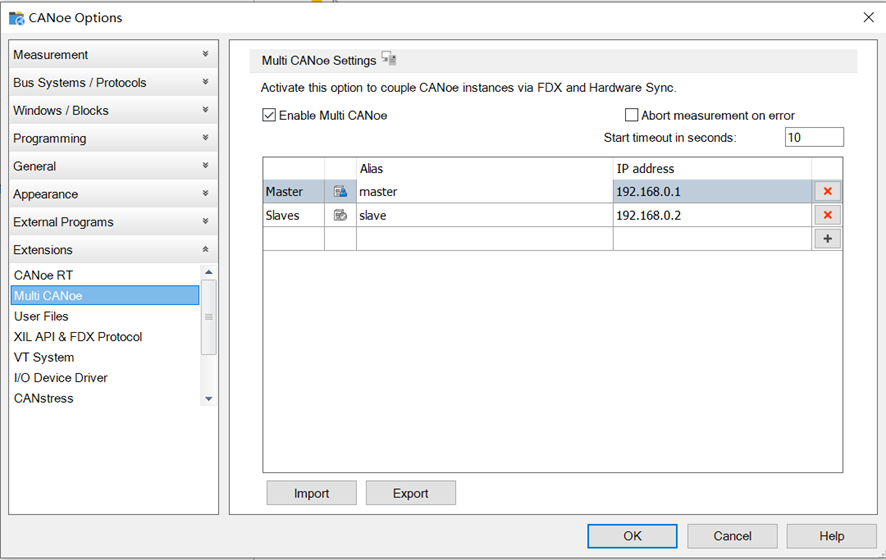
图3 Multi CANoe Settings对话框
2.时间同步
几乎所有Vector VN硬件都可以通过同步线实现时间同步。某个接口在这条线上发出一个脉冲,可以几乎同时被所有连接的接口检测到。然而,我们连接的接口越多,发送脉冲所需的时间就越长,脉冲边缘的质量就越弱。为了保证整个系统的实时性,我们通过把硬件用同步线连接来补偿这个延时。涉及到两个硬件时,可以使用同步线直接连接;涉及到多个硬件时,需要使用到同步盒。
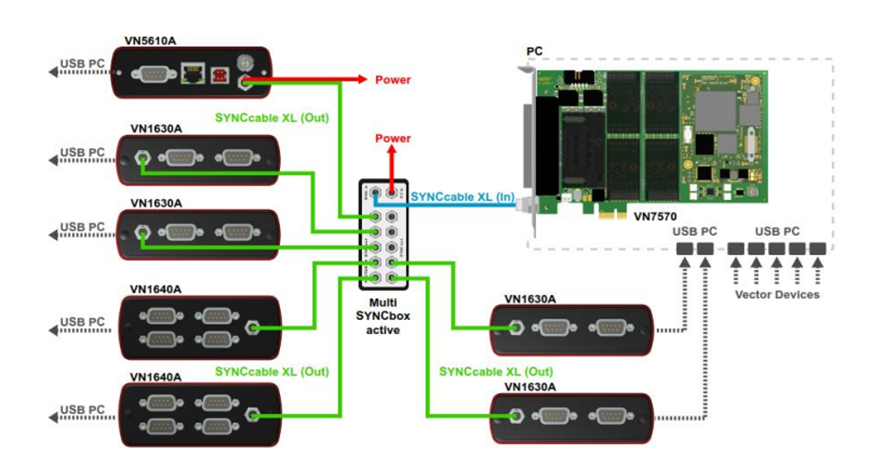
图4 同步VN接口概念图

图5 同步盒/同步线
使用Multi CANoe的过程中,当测量在任何一个Multi CANoe工程上启动时,它会向master发送一个启动请求,接着master会向所有的CANoe工程发送一个启动命令。收到这个命令之后,每个CANoe工程启动其当前配置,并将此状态报告给主机。在这个阶段,所有的驱动程序都在运行,但是 CANoe不处理任何事件。当master检测到所有的CANoe工程都达到这个状态时,它会通过同步接口发送一个同步脉冲,这个脉冲就是所有工程的时间戳0。此时,所有的CANoe工程开始处理驱动程序事件。
所以,除了物理连接,我们还需要确定整个系统的同步源。在主机的Network Hardware Configuration窗口中可以进行配置。如下图的同步源就是CAN1通道。
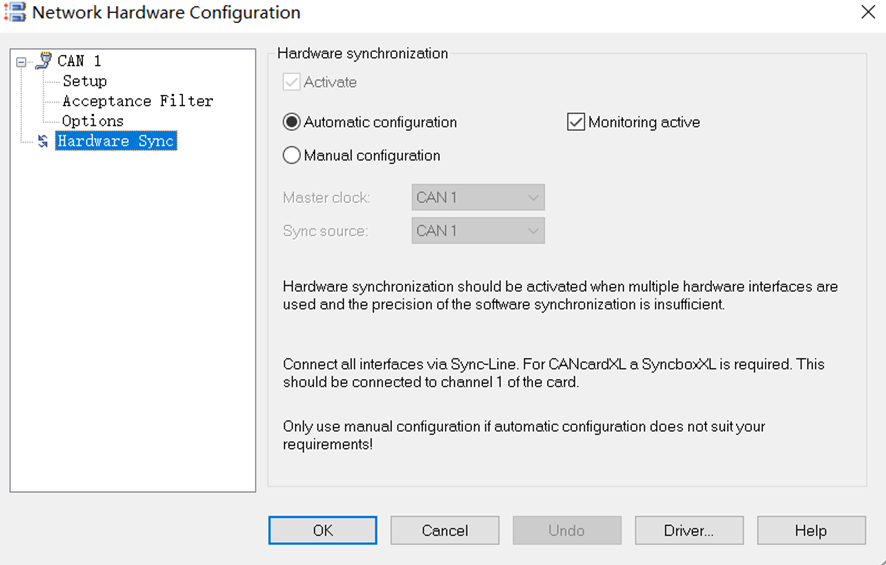
图6 Network Hardware Configuration窗口
3.版本和License信息
对于Multi CANoe来说,所有计算机上安装的CANoe主版本、SP版本都必须相同。
Multi CANoe的主机需要一个pro/run license,从机需要CANoe Slave license或者对应的pro/run license,如果需要使用到诸如LIN、J1939等Option,只需要主机配置相应的CANoe pro/run Option.LIN/J1939即可。
举个例子:
一个SUT包含CAN、LIN和Ethernet网络,需要使用三台计算机来实现,license信息我们可以这样进行配置

图7 license信息配置举例
在理解了上述特点之后,我们来看看实现这个功能需要哪些步骤。
在以下场景中,我们使用了两台PC,用到的license为CANoe pro✖2,工程可以实现简单的开关灯、速度调节功能。
一、License和CANoe软件准备
- 准备需要使用的License
- 检查不同计算机CANoe版本信息,如有发现不一致的情况,需要更新到一致
二、硬件软件连接
- 硬件连接

图8 硬件连接到同步盒
- 软件连接
把计算机放在同一个IPv4子网下
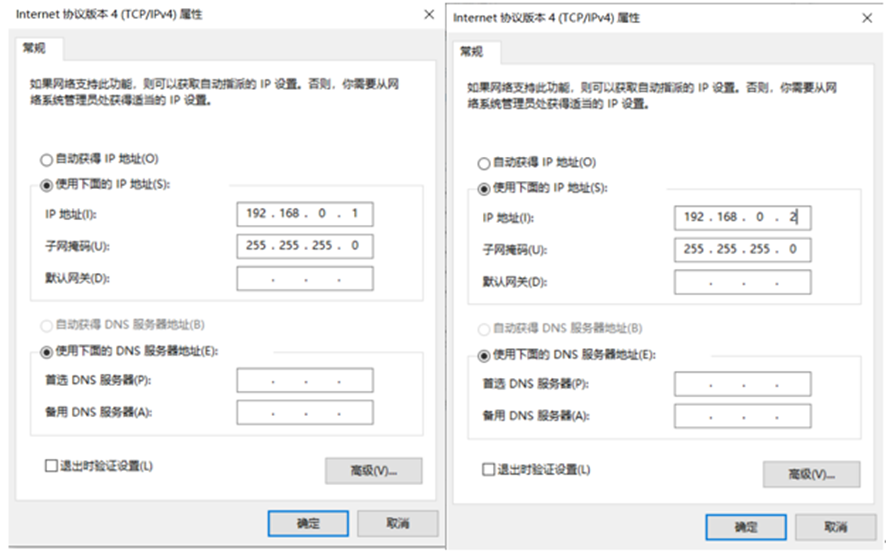
图9 子网信息
- 配置主机
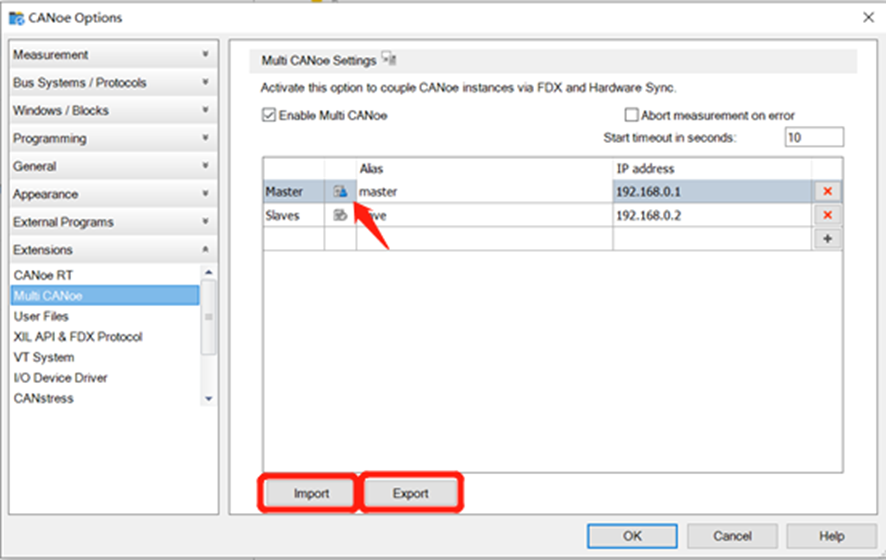
图10 主机Multi CANoe Settings
将主机的这个配置导出为文件并分享给从机,从机进行导入。注意,这里不可以手动配置从机使之和主机一模一样,必须导入导出。从机导入后如下:
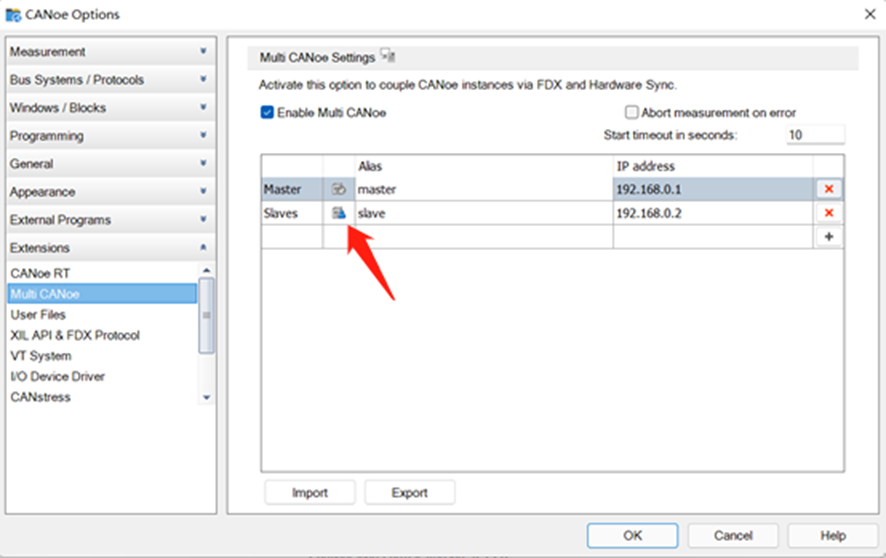
图11 从机Multi CANoe Settings
注意看箭头部分,主机的配置界面是主机Ip地址那一行状态置蓝,从机的配置界面为从机Ip地址那一行的状态置蓝。
- 配置同步源
将主机的Network Hardware Configuration窗口进行如下配置,则同步源为CAN1通道,这个时候从机的Network Hardware Configuration窗口会成为如下状态:
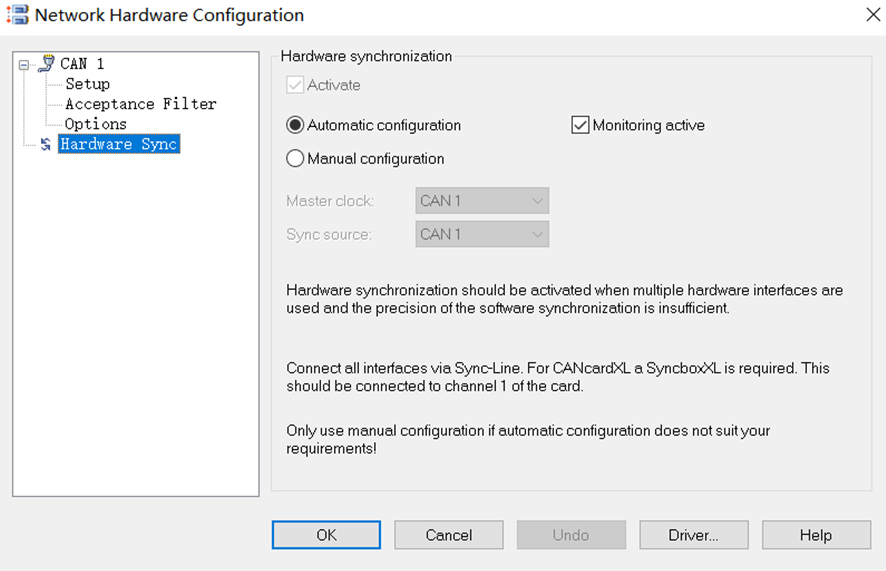
图12 主机Network Hardware Configuration窗口
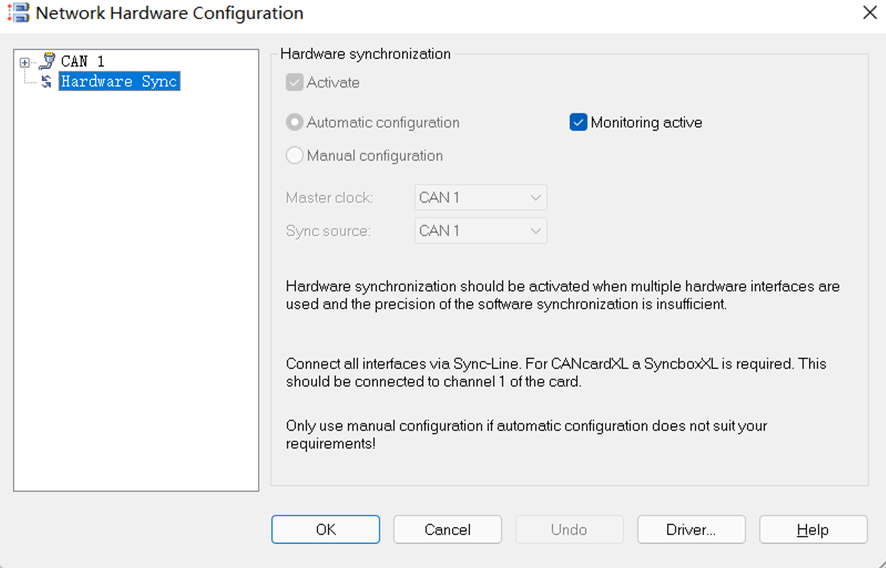
图13 从机Network Hardware Configuration窗口
三、系统变量配置
Multi CANoe一个很大的特点是不同CANoe工程中的系统变量可以同步变化,对于需要同步的系统变量,我们在主机上进行如下配置,并将主机上的配置导出为文件,再导入到从机上,这样就可以实现系统变量的同步变化。需要注意的是,过多被配置的系统变量会导致大量的负载,从而影响系统的实时性。
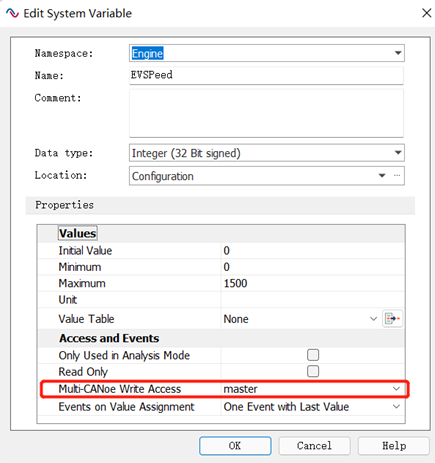
图14 主机系统变量的配置
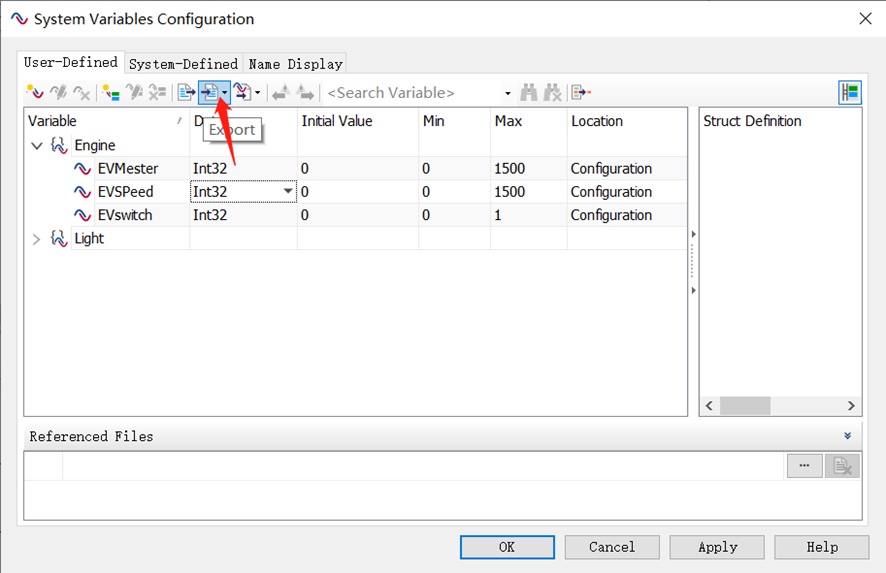
图15 系统变量
四、工程运行
运行主机时,从机都会在短暂的延迟后同步运行,在主机上控制系统变量的变化,从机上也会相应变化,下图是主机和从机的分析面板对比,可以看到,各个分析窗口的信息都是一致的。
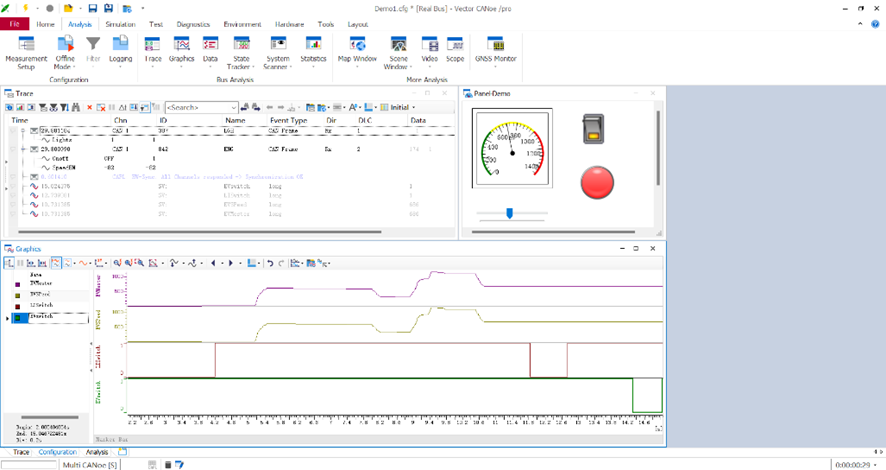
图16 主机分析面板
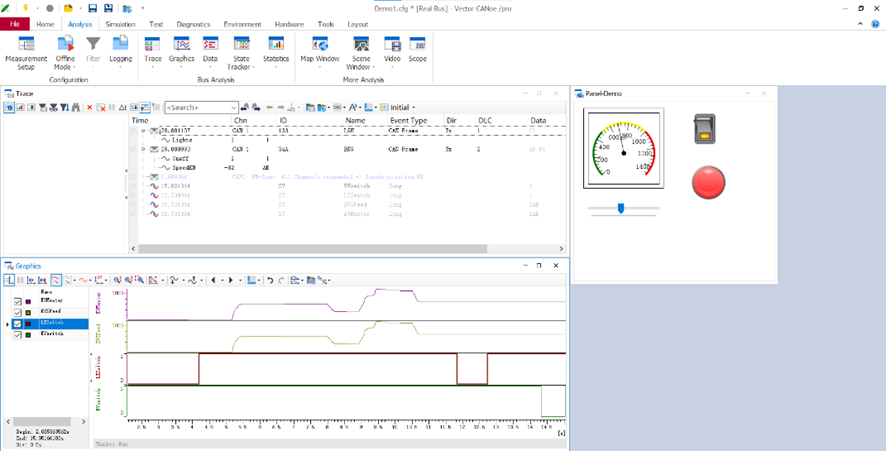
图17 从机分析面板
小tips:第一次工程运行时,可能会出现从机并没有同步启动的状况,这个时候可以手动启动从机的工程,然后将主机从机的工程都停掉。再重新启动主机,即可恢复正常。
总结
上面这个工程实现的功能相对简单,只使用了两台pc,希望可以抛砖引玉,唤醒大家的头脑风暴,将这个功能应用到更大的场景中去。CANoe还有更多更强大的功能有待开发,我们与屏幕前的大家共同努力。
北汇信息作为Vector中国的合作伙伴,始终专注于汽车电子领域的新技术和新产品,为整车厂和零部件企业提供完整的研发、测试解决方案。从测试工具、专用测试设备、完整测试方案到实车测试服务,我们正在努力,让中国的汽车变得越来越安全、越来越舒适、越来越智能。
注:文中部分图片来源于Vector。

















 4211
4211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









