



传统的双目DLP三维重建方法是基于两个相机的交集和进行重建的因此视野会受限,单目DLP三维重建方法是可以重建完整的幅面,但是这两种方法都无法解决反光问题。因此提出了一个双单目的三维重建方法,用于解决反光的问题。考虑两个相机的反光区域不一样,可以将两个单目重建的数据进行融合从而解决反光而无法重建的问题。
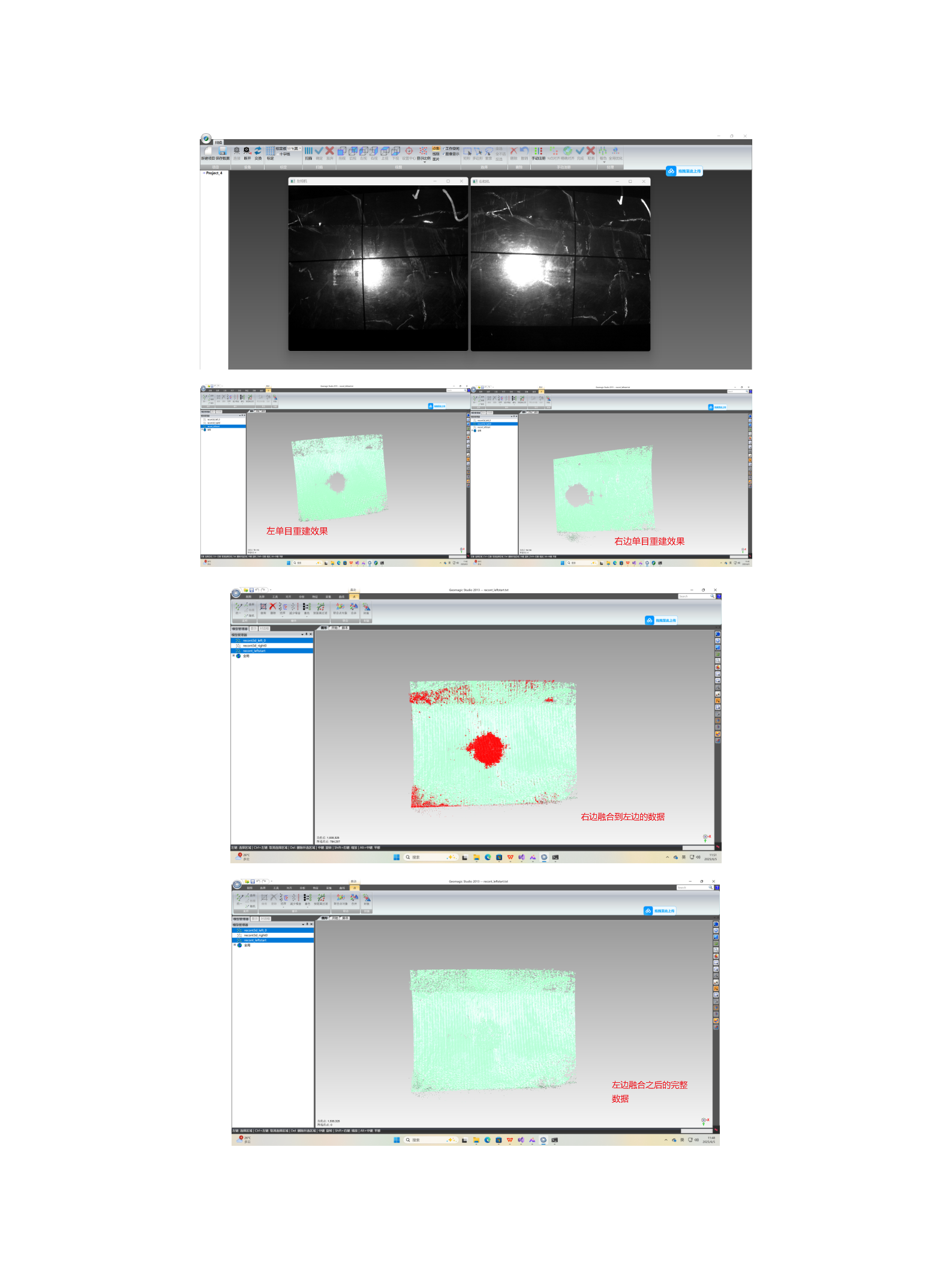
如上图所示:
1:先采用单目重建方法,左右相机分别进行三维重建
2:将右边相机重建的数据映射到左相上
3:以左相机为基础生成一个完整的三维数据
结论:通过此方法可以很好的解决大反光造成的数据缺失问题


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











