MMAI 2015 FINAL PROJECT
Final Demo
To Know Where We Are: Positioning-based Photo Retrieval
2015/12/16 Update
To Know Where We Are: Positioning-based Photo Retrieval
Input: query photo
Return: other photos taken in the same position with different direc
tion.
Method: use training photos collected from Internet or somewhere else to bulit a 3D model, perform 2D-3D matching when the query photo comes. As a result we get the position where the query photo was taken, then we use the position to final all photos taken in the same position or those was taken very close to this position ------- A new concept of image retrieval.
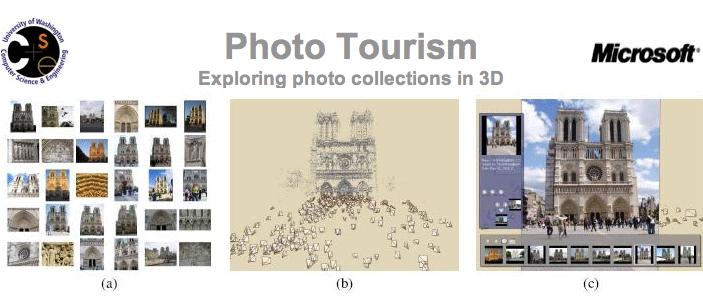
Topic 1 Photo Tourism In Campus (existing)
Use an amout of photos to built a campus model in 3D, and enable the guest to interactively move about the 3D space by seamlessly transitioning between photographs.
Method:
Snavely, et al. "Photo tourism: exploring photo collections in 3D."
ACM transactions on graphics
, 2006.
Topic 2 Best Shooting Point Seeking
Use an extension of the above work to find the best position to take a photo in a scene. This could be achieved by finding the viewpoints-densest area in the 3D model.
Topic 3 Photo-based Positioning
An extension of the above work. By using our own photo to quey the 3D model in a feature-based method, we could find where we are as well as get the photos taken near our current position.
Method:
Sattler, et al. "Fast image-based localization using direct 2D-to-3D matching."
ICCV 2011.
Topic 4 CBIR System based on pretrained model feature extraction
After HW2, I have tried features extracted by pretrained model of GoogleNet. It turned out that such features was effective and thus led to more than 80% presicion(MAP) on our database.








 介绍了一种基于位置的照片检索系统,该系统通过构建三维模型并与二维查询图片进行匹配来确定拍摄位置,并返回同一位置不同方向的照片。此外还探讨了包括校园旅游摄影、最佳拍摄点寻找及基于预训练模型的CBIR系统等主题。
介绍了一种基于位置的照片检索系统,该系统通过构建三维模型并与二维查询图片进行匹配来确定拍摄位置,并返回同一位置不同方向的照片。此外还探讨了包括校园旅游摄影、最佳拍摄点寻找及基于预训练模型的CBIR系统等主题。



 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























