




加减速算法根据分区数量可分为三段式加减速、五段式加减速、七段式加减速等,具体可查看【数控系统】第六章 加减速控制算法
本章介绍七段式加减速算法的计算流程,适用于非对称七段式加减速。(三段式和五段式的算法思路类似,在初始和结束速度均为0的情况下,计算公式更简单,这里不做赘述。)
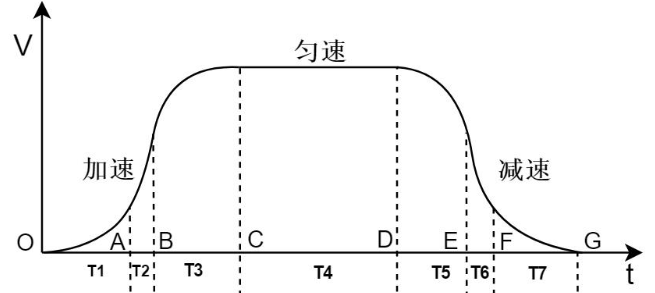
一、七段式加减速算法流程
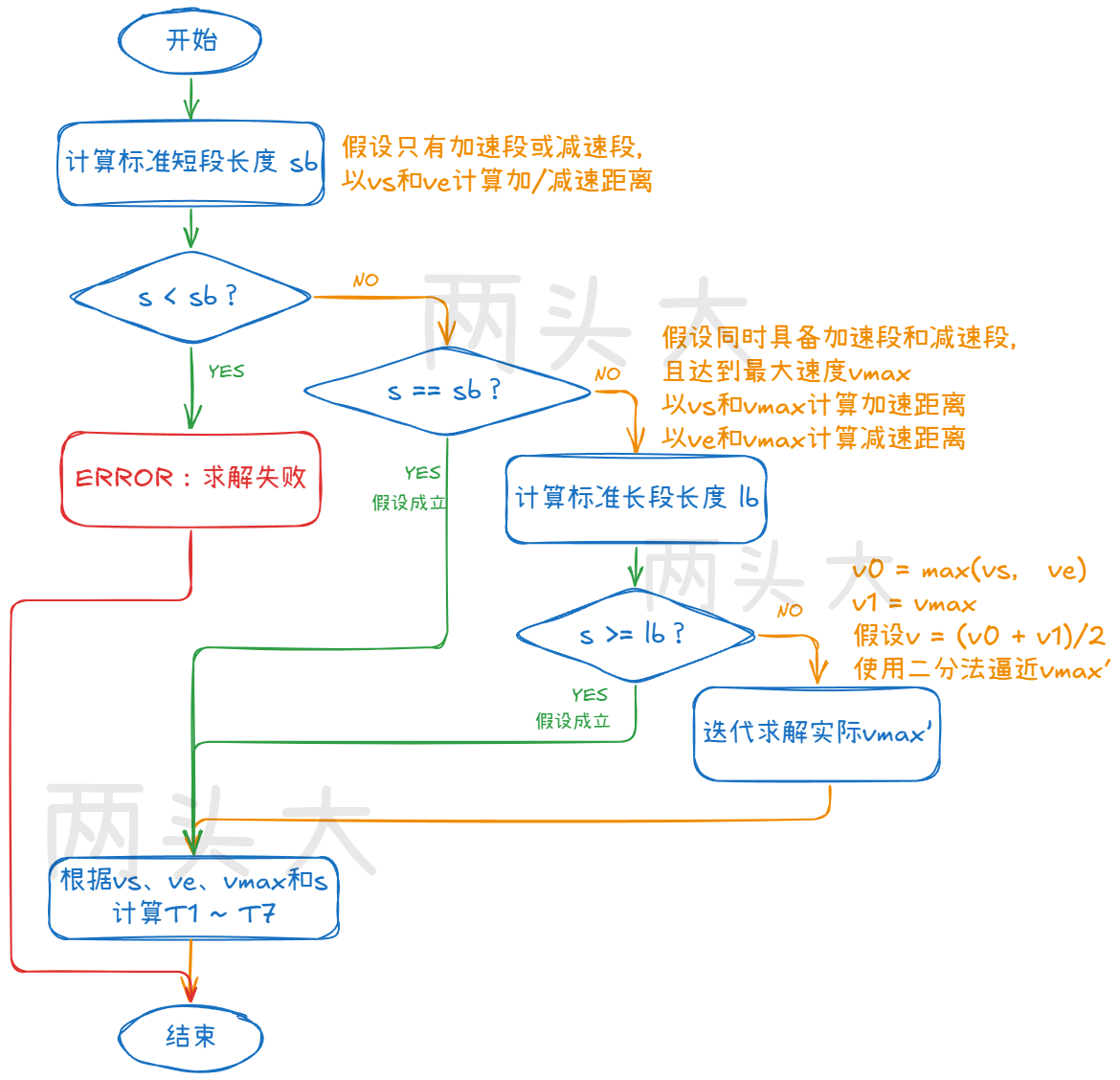
1、方法一
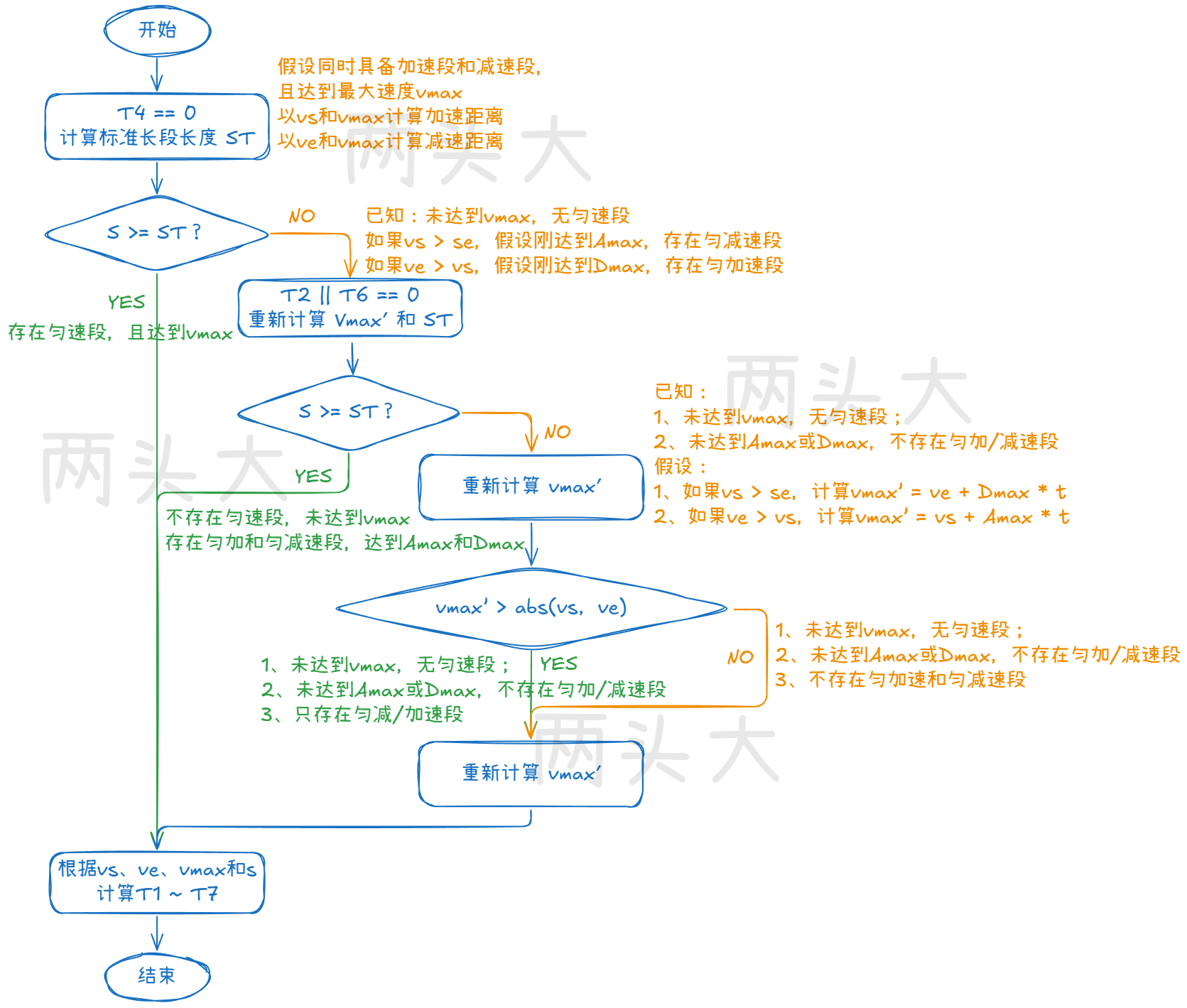
2、方法二
该方法参考《加加速度连续的S型加减速规划算法》(该论文存在勘误,请注意甄别)以及 YuZhi 在github上的开源项目 MatlabRobotAlg 。
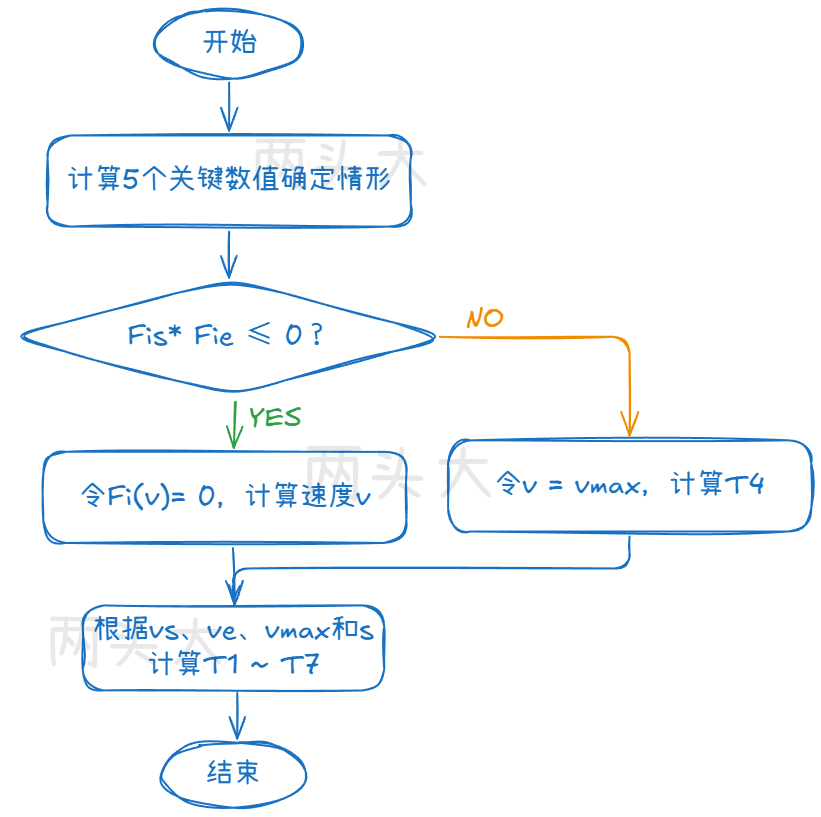
3、方法三
该方法参考《加加速度连续的S型加减速规划算法》(该论文存在勘误,请注意甄别)。
二、加减速轨迹计算
当求解出七段的时间T1~T7后,我们可以根据时间区间判断当前处于哪种状态(加加速段、匀加速度段、减加速度段、匀速段、加减速段、匀减速段、减减速段),计算当前周期的加加速度J(i)、加速度A(i)、速度V(i)和距离S(i)。
1、常规轨迹计算
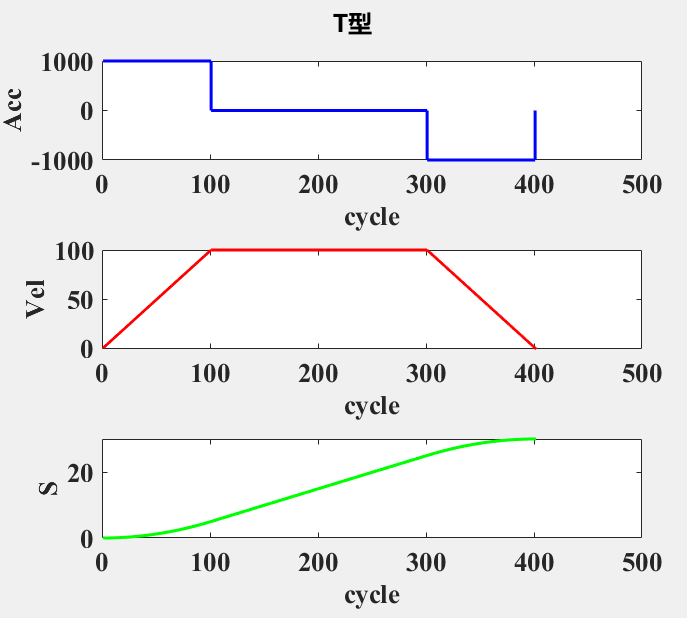
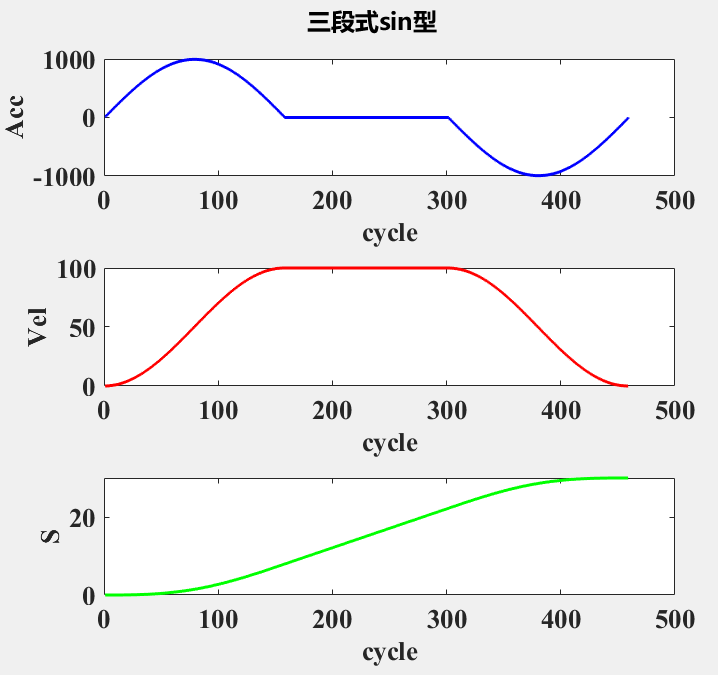
采用 MatlabRobotAlg 项目进行测试,该项目为YuZhi 在 github 上的开源项目,支持T型、sin型、S型等加减速算法。
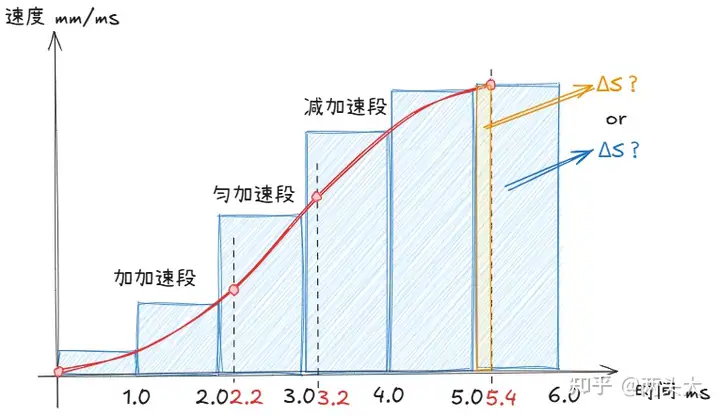
由于T(i) 为浮点数(不一定为插补周期的整数倍),因此常规轨迹计算通过判断当前周期t与T(i) 的差值是否小于阈值TOL,若是则为 T(i-1) 到 T(i) 区间。此外,由于t - T(7) 可能大于 TOL,因此需要对这种情况进行特殊判断。
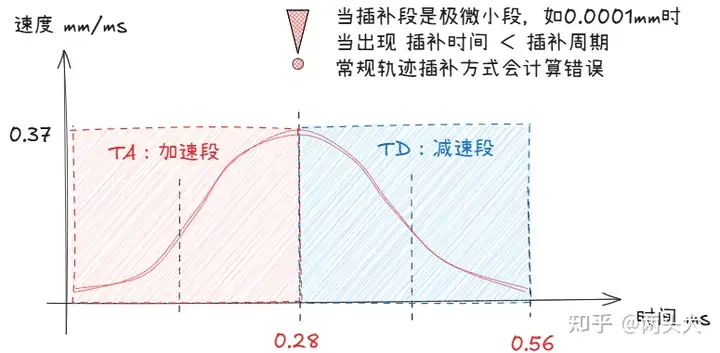
① 常规轨迹计算还需考虑 t < 插补周期(如1ms~8ms)的情况。在这种情况下,以上的判断逻辑会导致计算错误。
② 常规轨迹计算还需考虑 t - T(7) > TOL 时,此时加加速度、加速度、速度和距离的计算方式,如果仍采用 t - T(7) ≤ TOL的方式,将会导致超出目标距离;如果直接将目标距离作为最后一个插补周期的目标位置,则会导致速度的突变。
以MatlabRobotAlg 的S型加减速为例,常规轨迹计算代码如下:
function [s,v,a,jerk] = s_curve_cal_pvaj_con_ext(t,j,t_int)
T = 0.0:t_int:t(7);
sum_no = length(T);
a = linspace(0,0,sum_no);
v = linspace(0,0,sum_no);
s = linspace(0,0,sum_no-1);
jerk = linspace(0,0,sum_no);
delta_t = linspace(0,0,7);
delta_t(1) = t(1)-0.0;
delta_t(2) = t(2)-t(1);
delta_t(3) = t(3)-t(2);
delta_t(4) = t(4)-t(3);
delta_t(5) = t(5)-t(4);
delta_t(6) = t(6)-t(5);
delta_t(7) = t(7)-t(6);
am = j*t(1);
v1 = 1/2*j*delta_t(1)^2;
v2 = v1+am*delta_t(2);
v3 = v2+am*delta_t(3)-1/2*j*delta_t(3)^2;
v4 = v3;
v5 = v4-1/2*j*delta_t(5)^2;
v6 = v5-am*delta_t(6);
s1 = 1/6*j*delta_t(1)^3;
s2 = s1+v1*delta_t(2)+1/2*am*delta_t(2)^2;
s3 = s2+v2*delta_t(3)+1/2*am*delta_t(3)^2-1/6*j*delta_t(3)^3;
s4 = s3+v3*delta_t(4);
s5 = s4+v4*delta_t(5)-1/6*j*delta_t(5)^3;
s6 = s5+v5*delta_t(6)-1/2*am*delta_t(6)^2;
for i = 1:sum_no
% abs(i*t_int-t(1))
if (i*t_int >= 0) && ((i*t_int-t(1))<=0.0000001)
temp_t = i*t_int;
jerk(i) = j;
a(i) = j*temp_t;
v(i) = 1/2*j*temp_t^2;
s(i) = 1/6*j*temp_t^3;
elseif (i*t_int-t(2))<=0.0000001
temp_t = i*t_int-t(1);
jerk(i) = 0;
a(i) = am;
v(i) = v1+am*temp_t;
s(i) = s1+v1*temp_t+1/2*am*temp_t^2;
elseif (i*t_int-t(3))<=0.0000001
temp_t = i*t_int-t(2);
jerk(i) = -j;
a(i) = am-j*temp_t;
v(i) = v2+am*temp_t-1/2*j*temp_t^2;
s(i) = s2+v2*temp_t+1/2*am*temp_t^2-1/6*j*temp_t^3;
elseif (i*t_int-t(4))<=0.0000001
temp_t = i*t_int-t(3);
jerk(i) = 0;
a(i) = 0;
v(i) = v3;
s(i) = s3+v3*temp_t;
elseif (i*t_int-t(5))<=0.0000001
temp_t = i*t_int-t(4);
jerk(i) = -j;
a(i) = -j*temp_t;
v(i) = v4-1/2*j*temp_t^2;
s(i) = s4+v4*temp_t-1/6*j*temp_t^3;
elseif (i*t_int-t(6))<=0.0000001
temp_t = i*t_int-t(5);
jerk(i) = 0;
a(i) = -am;
v(i) = v5-am*temp_t;
s(i) = s5+v5*temp_t-1/2*am*temp_t^2;
elseif (i*t_int-t(7))<=0.0000001
temp_t = i*t_int-t(6);
jerk(i) = j;
a(i) = -am+j*temp_t;
v(i) = v6-am*temp_t+1/2*j*temp_t^2;
s(i) = s6+v6*temp_t-1/2*am*temp_t^2+1/6*j*temp_t^3;
else
temp_t = t(7)-t(6);
jerk(i) = 0;
a(i) = 0;
v(i) = 0;
s(i) = s6+v6*temp_t-1/2*am*temp_t^2+1/6*j*temp_t^3;
end
end
end2、圆整轨迹计算
数控系统以固定的插补周期向伺服驱动器发送脉冲数据,一般插补周期为1~8ms(根据不同性能和型号有所不同)。因此速度和位置都是处理成插补周期的整数倍进行计算,存在离散误差。为了保证速度平稳以及确保末端位置精准,需对计算误差进行补偿。离散化后需重新计算加加速度J和加速度A。根据新的加加速度J和加速度A,计算圆整误差,并根据误差模型补偿回每个插补周期,最终实现精确的插补。
三、加减速算法可视化
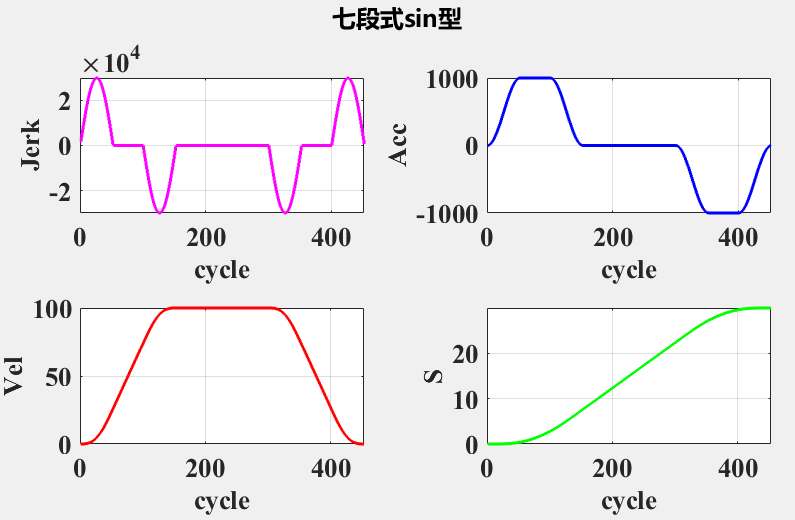
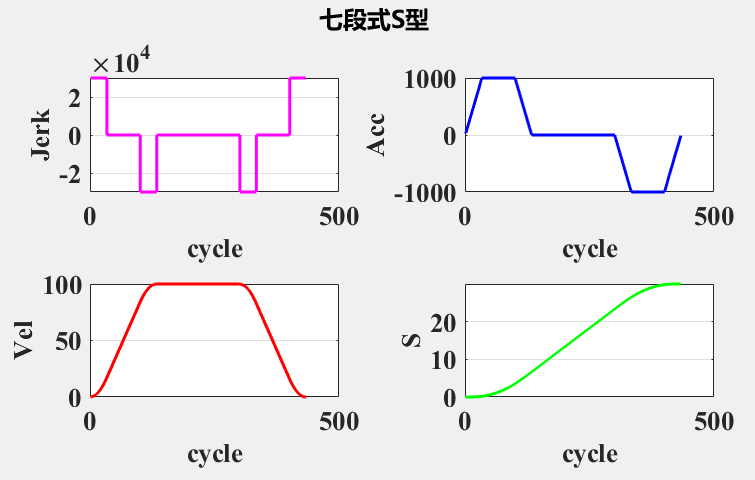
1、非圆整轨迹计算
使用以下参数进行计算
% 机床参数 mm/s mm/s^2 mm/s^3 s
mac_param = struct('max_vel',100,'max_acc',1000,'max_jerk',30000,'cycle_time',0.001);
% 线段参数 mm mm/s mm/s
line_param = struct('length',30,'vs',0,'ve',0);计算得到 t1 ~ t7 的数值,此时数值可能非插补周期1ms的整数倍,采用 YuZhi 在 github 上的开源项目 MatlabRobotAlg 中的 xx_cal_pvaj 轨迹计算函数进行显示(该项目仅支持初始速度和结束速度为0的加减速算法)。
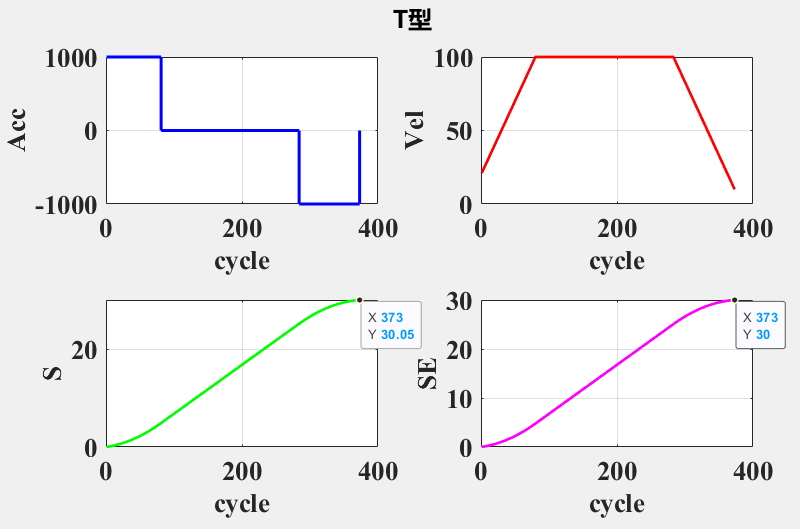
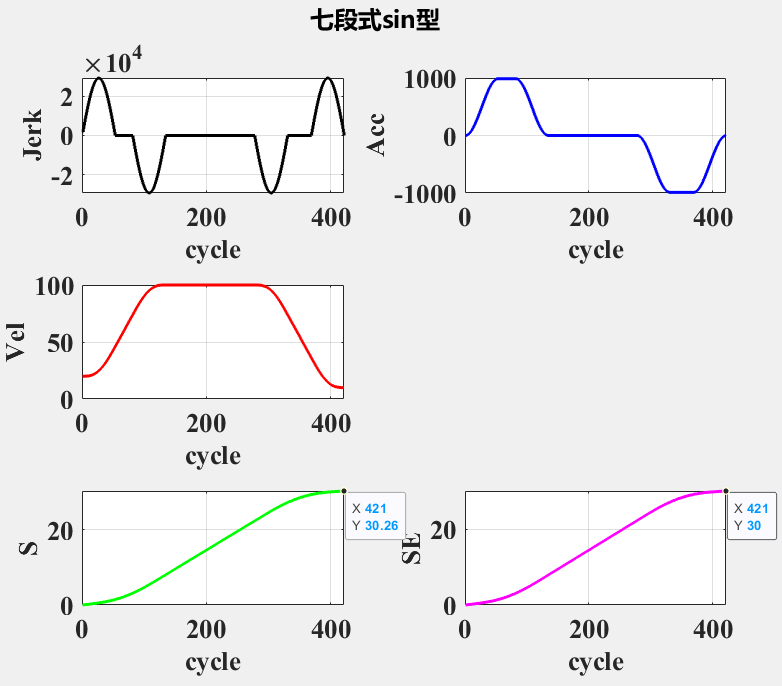
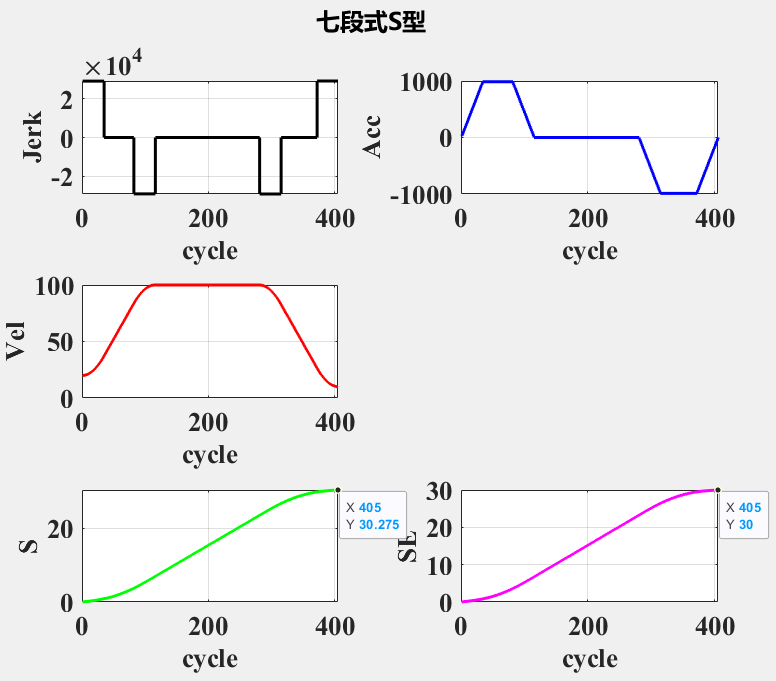
2、圆整轨迹计算
使用以下参数进行计算
% 机床参数 mm/s mm/s^2 mm/s^3 s
mac_param = struct('max_vel',100,'max_acc',1000,'max_jerk',30000,'cycle_time',0.001);
% 线段参数 mm mm/s mm/s
line_param = struct('length',30,'vs',20,'ve',10);计算得到 T1 ~ T7 的数值,此时数值为插补周期1ms的整数倍,对离散后的数值进行误差补偿,得到补偿前S和补偿后SE。

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









