 ROSHelloWorld教程:从创建到执行
ROSHelloWorld教程:从创建到执行




 本文详细介绍了如何在ROS(RobotOperatingSystem)环境中实现HelloWorld示例,包括创建工作空间、功能包、编写C++源文件、配置CMakeLists.txt及编译执行的过程。
本文详细介绍了如何在ROS(RobotOperatingSystem)环境中实现HelloWorld示例,包括创建工作空间、功能包、编写C++源文件、配置CMakeLists.txt及编译执行的过程。
一、ROS版"Hello World"
流程大致为:
1.创建一个工作空间(workspace)
2.再创建一个功能包
3.编辑源文件(.cpp或者.py)
4.编辑配置文件
5.编译并执行
1.创建工作空间
mkdir -p demo01_ws/src //自定义工作空间名,工作空间下有一src子目录
cd demo01_ws //(Tab可补齐) 进入工作空间
catkin_make //编译
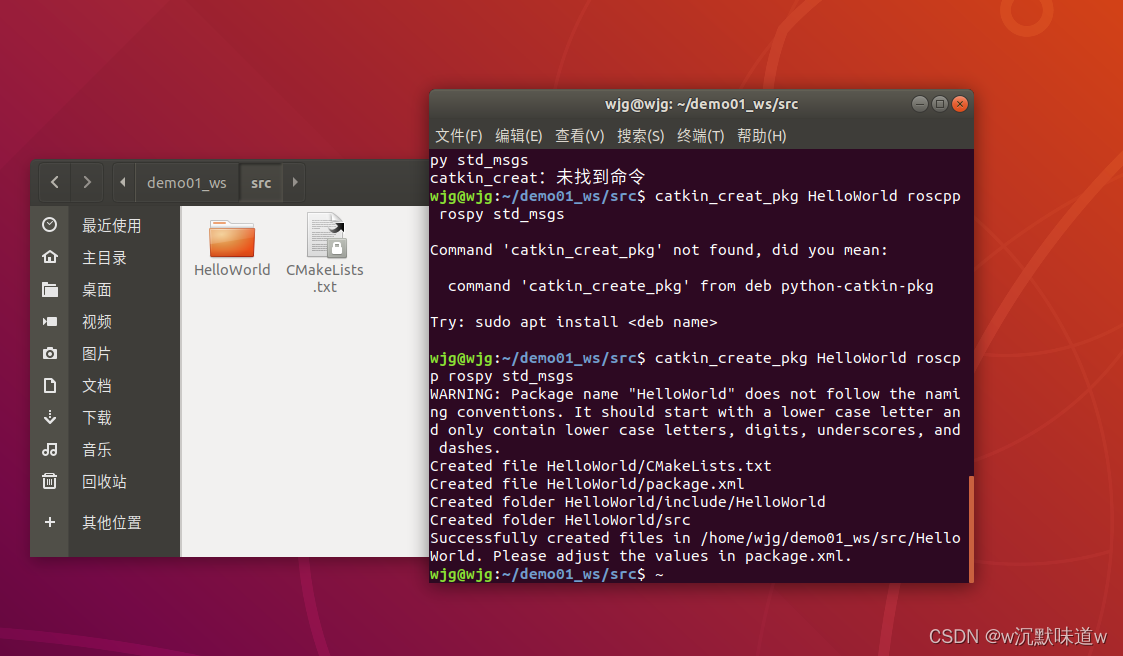
2.进入src创建ros功能包并添加依赖
cd src/ //进入src目录
catkin_creat_pkg HelloWorld roscpp rospy std_msgs
//catkin_creat_pkg: 创建功能包命令 HelloWorld: 功能包名字
//后面三个为依赖
3.编写程序
首先进入功能包的src目录,创建C++源文件,如果在该目录下不能鼠标右键创建则可以在终端使用:
touch HelloWorld.cpp
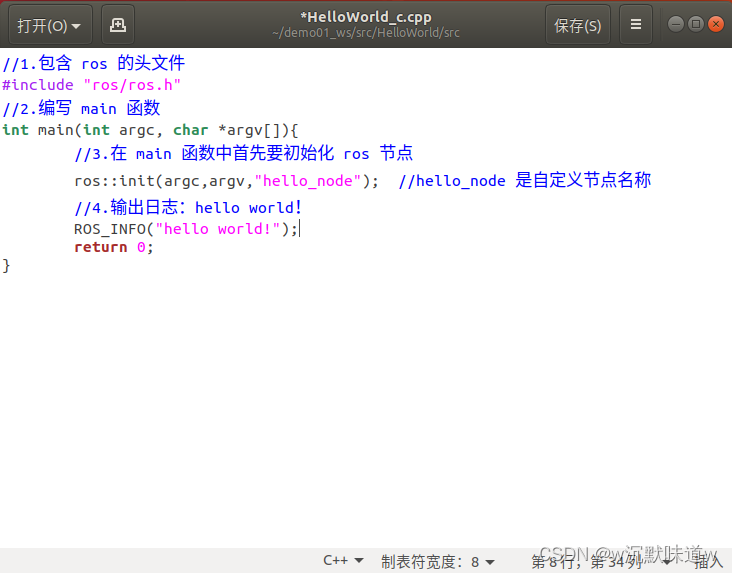
接着在.cpp文件中编写代码:
然后编辑配置Cmakelists.txt文件
首先找到这两个:
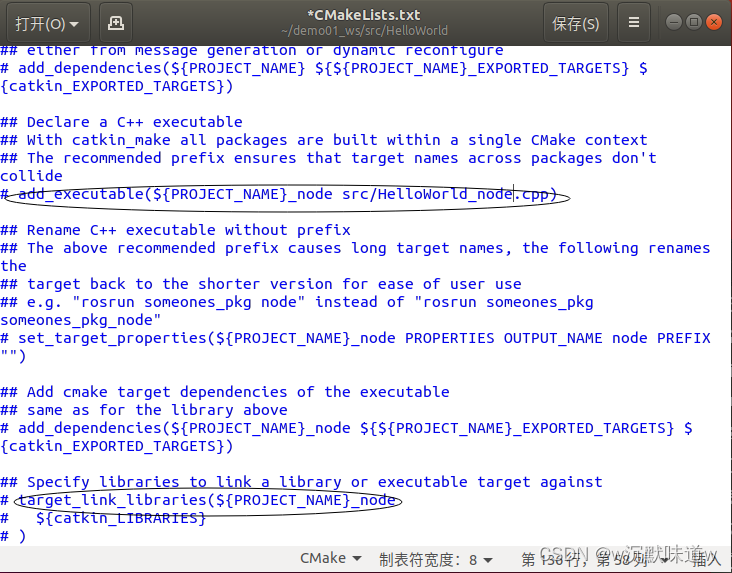
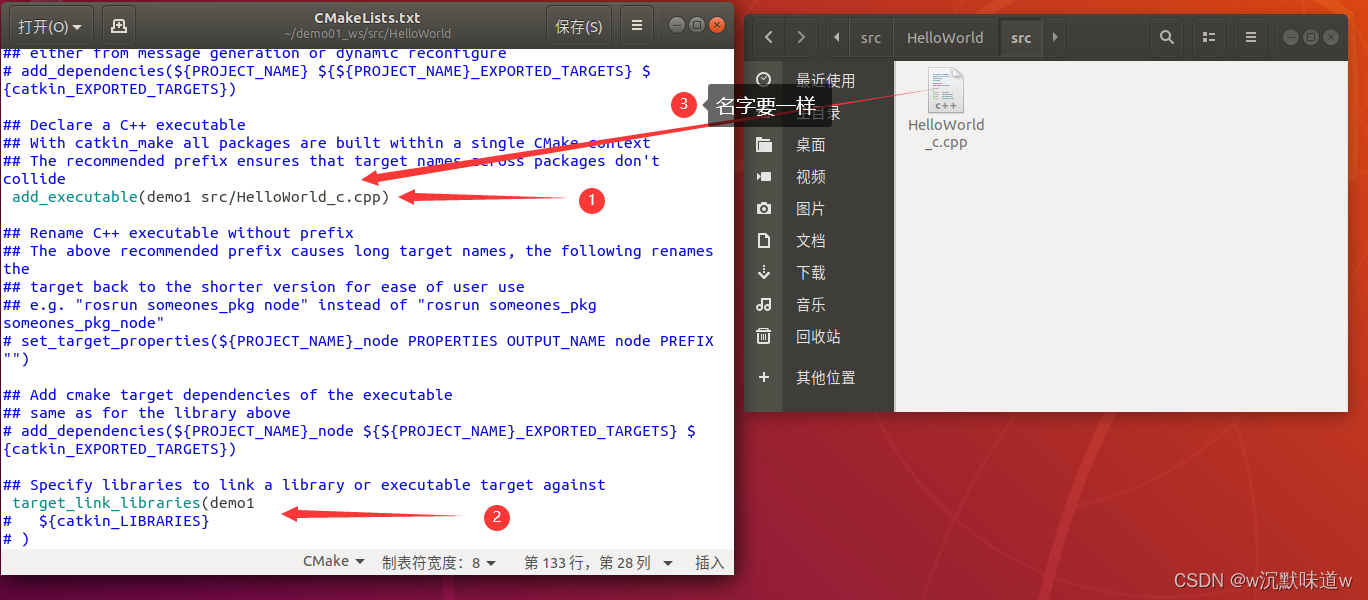
#add_executable 后面有两个参数 第一个是我们可以随意起的一个名字(假设为demo1 demo1会映射后面的第二个参数),第二个是我们的.cpp源文件的名字,不一样的话要修改为和自己的一样的
#target-linker_libraries 第一个参数修改为上面我们自己起的名字(demo1)
同时都要删掉#号
(编译时发现上图存在错误,在target_linker部分未将#全部删除)
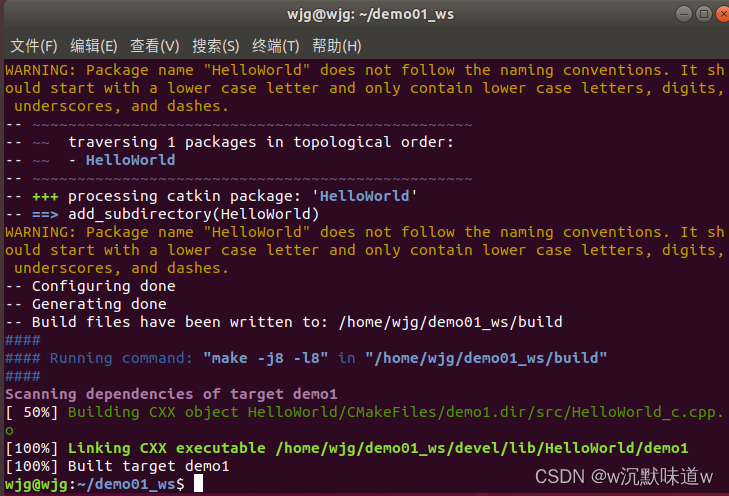
最后在workspace目录下使用catkin_make命令编译
最后最后,编译完成后,执行源文件
①启动roscore 在新的终端:roscore
②source一下 source ./devel/setup.bash
③执行 rosrun HelloWorld(包名) demo1 (还记得上面demo1映射我们的源文件吗)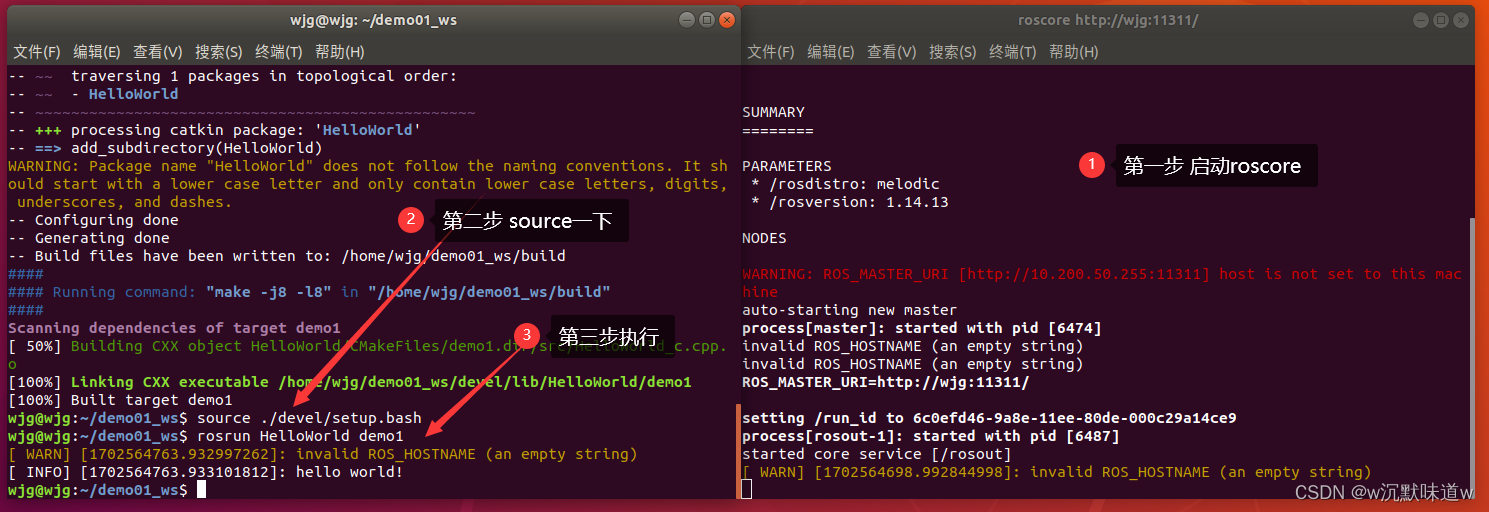


















 1775
1775

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











