




 本文详细介绍了半边数据结构的设计与实现,包括点、边、面的数据结构定义,以及在读取和写入obj文件、查找顶点和边的相关操作。此外,还提供了判断边界点和边的算法,帮助理解图形学中的数据组织和操作。
本文详细介绍了半边数据结构的设计与实现,包括点、边、面的数据结构定义,以及在读取和写入obj文件、查找顶点和边的相关操作。此外,还提供了判断边界点和边的算法,帮助理解图形学中的数据组织和操作。
功能
- 读取obj三角网格文件,将数据转化成半边数据结构。
- 将半边数据结构写入obj文件。
- 给定一个三角面,找到3个点按逆时针排列。
- 给定1个点,找到与该点相邻的面。
- 给定1个点,找到从该点出发的边。
- 给定1个点,找到进入到该点的边。
- 给定1个点,找到与该点相邻的点。
- 给定1条边,找到与该边相邻的面。
- 给定1个面及其1边,找到与该边相邻的另一面(如果有)。
- 判断点是否在边界点。
- 判断边是否为边界。
数据结构设计及功能算法
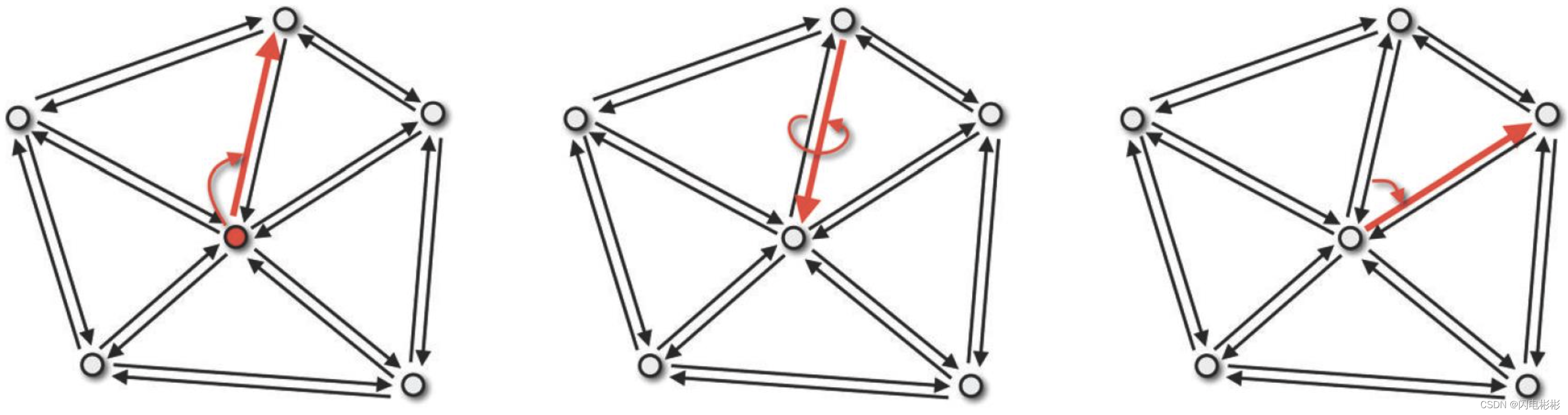
半边数据结构中的一条边分成2个方向,分别属于被边分割的2个部分。
每条边都有自己的后继和前驱,从一条边开始遍历后继,最后可以形成一个环。
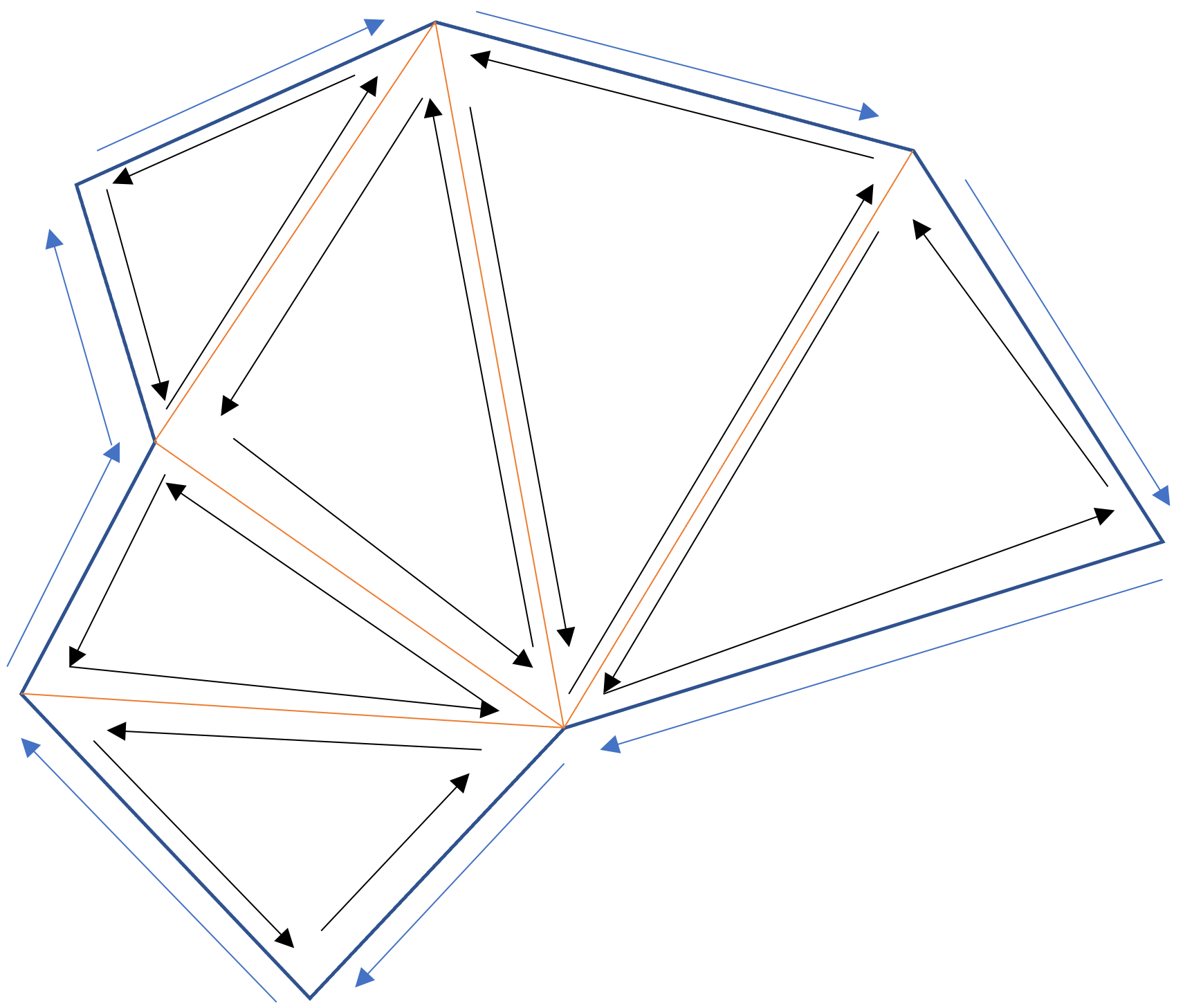
上图中箭头指向的边就是下一条边,反之是上一条边。
每个三角形内部会形成循环,最外部的边界所有边也会形成循环。如果内部有循环说明有空洞。
数据结构定义
// 点定义
class MVert
{
private:
int index_;// 编号, 从0开始
MPoint3 point_; // 坐标
MHalfedge* he_; // 从该点出发的一条半边,尽量设置成边界边(如果有)
};
// 半边结构
class MHalfedge {
private:
int index_; // 编号
MVert* v_; // 半边起点
MEdge* e_; // 半边对应的全边
MPolyFace* poly_face_; // 半边对应的三角面
MHalfedge* next_, * prev_; // 后继和前驱
MHalfedge* pair_; // 对应的另一条半边
};
// 全边结构
class MEdge {
private:
int index_; // 编号
MVert* v1_; MVert* v2_; // 对应2点
MHalfedge* he_; // 其中一条半边
};
// 三角面定义
class MPolyFace
{
private:
int index_; // 编号
MHalfedge* he_begin_; // 开始半边
};
// 物体实体定义
class PolyMesh {
private:
std::vector<MHalfedge *> half_edges_;
std::vector<MVert *> vertices_;
std::vector<MEdge *> edges_;
std::vector<MPolyFace *> polygons_;
};
算法过程
- 读取obj三角网格文件,将数据转化成半边数据结构。
- 读入点入到数组里。
- 对于每个面,读入面的三个点。
- 构建出三条边,如果已经构建则复用。
- 三条边初始后继和前驱都是自己。
- 建立边与面的关系。
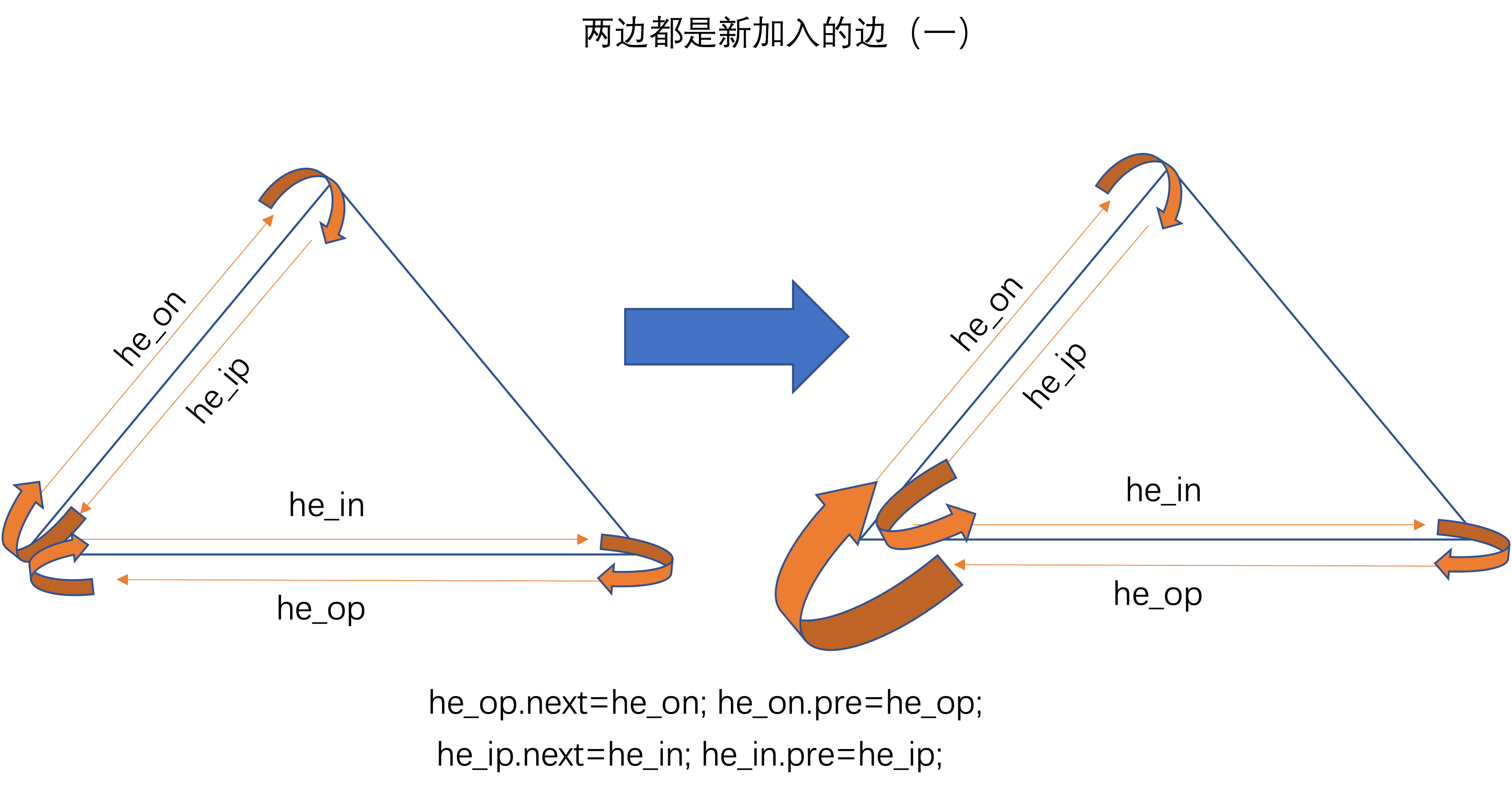
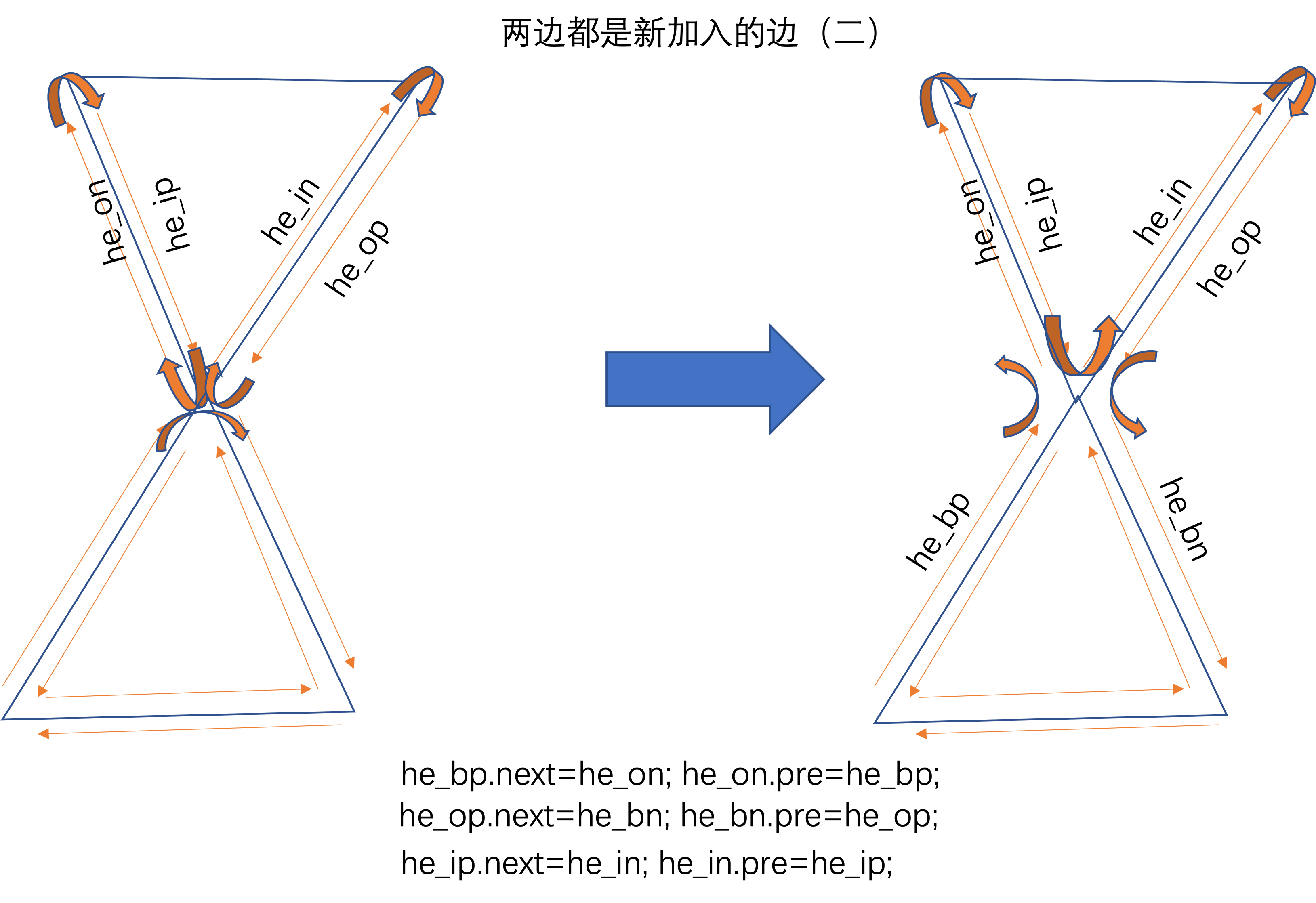
- 调整边的前驱和后继关系。返回步骤2.
上述过程比较复杂的是调整边的前驱和后继关系。下面以图示说明。每次调整的是三角形2条相邻边的关系。
上图中he_bp = he_bn.pre
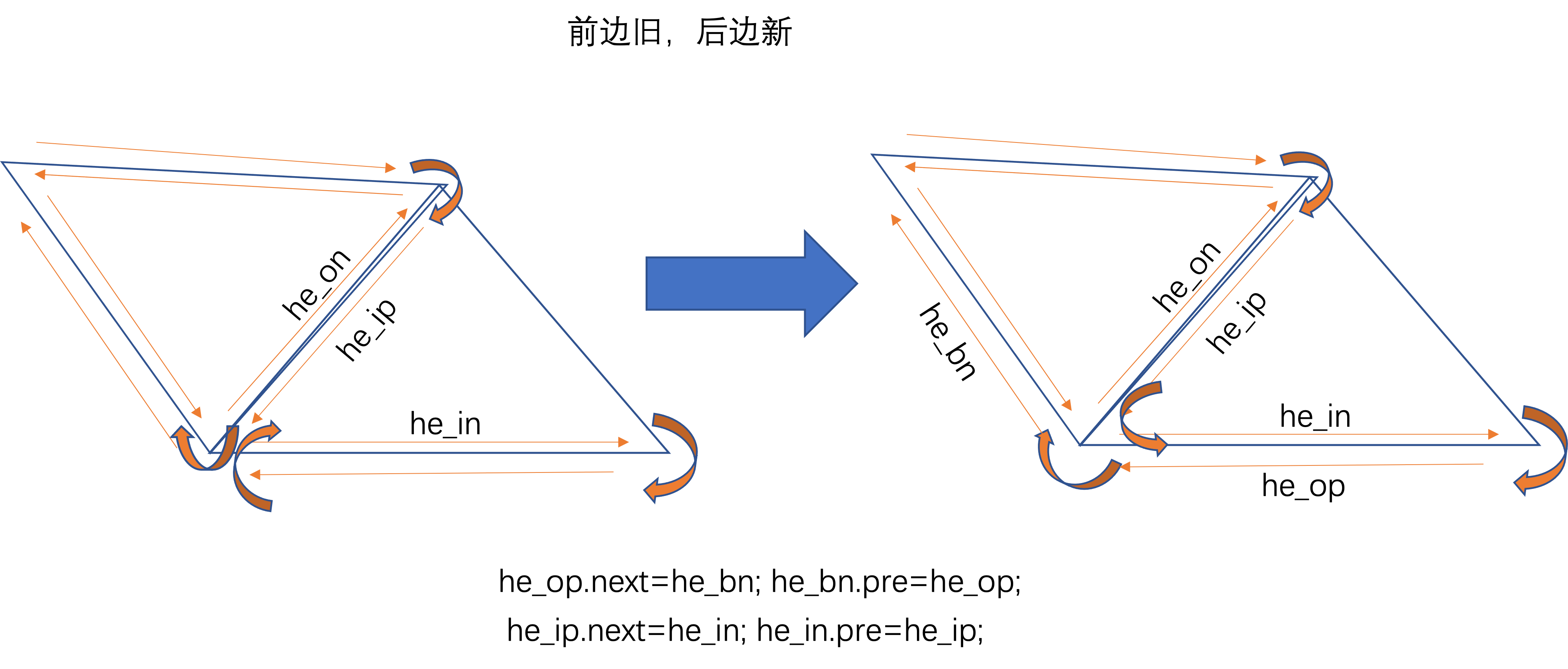
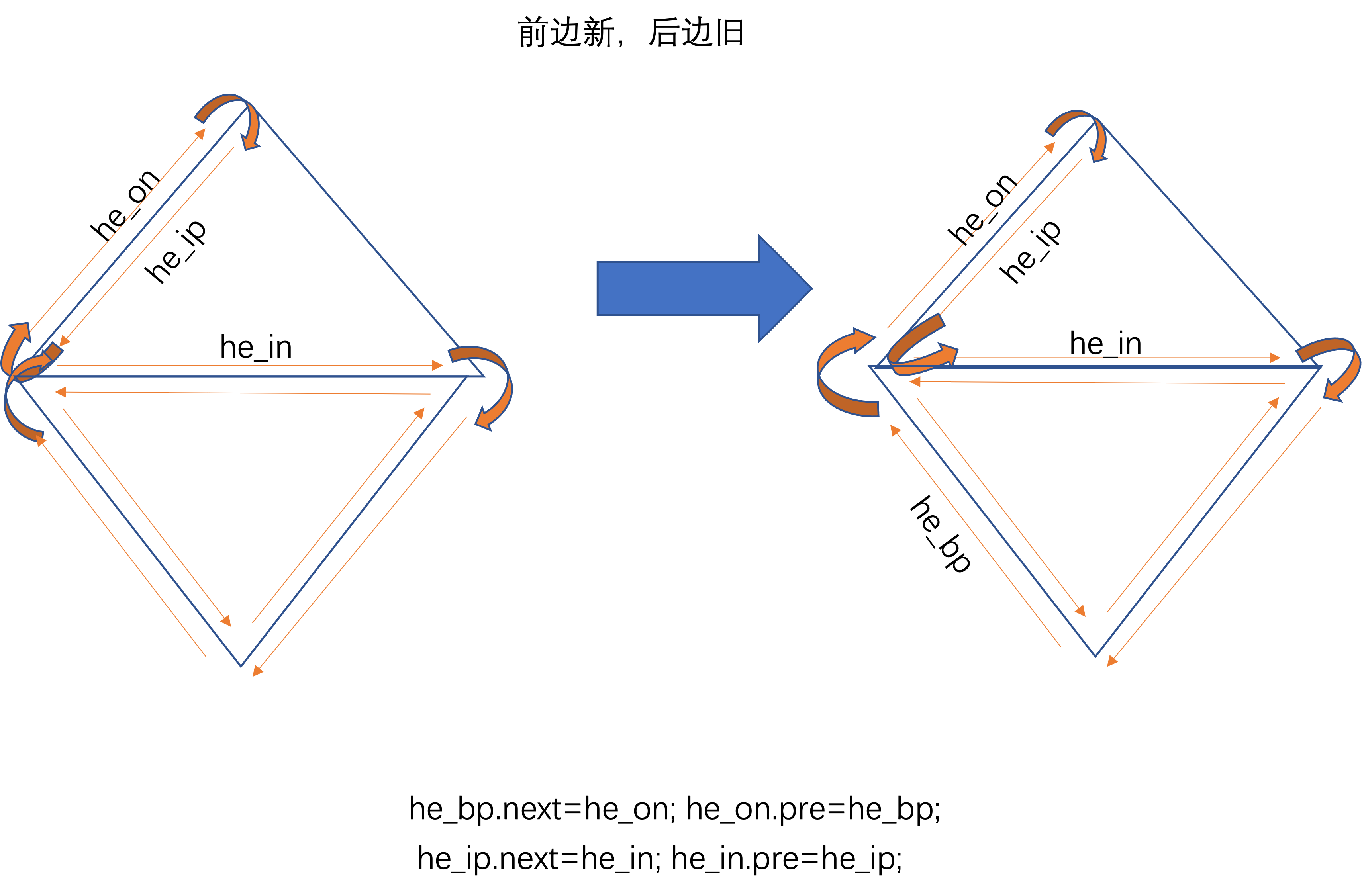
上图中he_bp=he_in.pre
- 将半边数据结构写入obj文件。
- 遍历点,写入obj文件。
- 遍历面,按照逆时针写入三点的编号。
-
给定一个三角面,找到3个点按逆时针排列。
找到三角面的第一条边he,拿到边的出发点,再找he.next,直到回到第一条边,找到3点。 -
给定1个点,找到与该点相邻的面。
先找到点的第一条边he, he.pair.next就是从点出发的下一条,如此反复找到所有边,就可以找到所有面。 -
给定1个点,找到从该点出发的边。
同上。 -
给定1个点,找到进入到该点的边。
同上,先找到第1条边he = v.he.pair, 下一条边是he.next.pair,如此反复找到所有边。 -
给定1个点,找到与该点相邻的点。
同上,找到所进入的边,边的起点就是相邻点。 -
给定1条边,找到与该边相邻的面。
找出2条半边he, he.pair, 半边邻接的面就是与该边相邻的面。 -
给定1个面及其1边,找到与该边相邻的另一面(如果有)。
找出边的2个半边,判断哪边与现有面连接,另一条相邻的面就是所求的面。 -
判断点是否在边界点。
扫描从该点出发的所有边,判断是否存在一条边没有面连接。 -
判断边是否为边界。
是否有邻接面。
代码实现
https://github.com/LightningBilly/ACMAlgorithms/tree/master/图形学算法/半边数据结构/glTriangle/
//
// Created by chenbinbin on 2022/3/30.
//
#include "MPoint3.h"
#include "MVector3.h"
#ifndef GLTRIANGLE_POLYMESH_H
#define GLTRIANGLE_POLYMESH_H
class MVert;
class MEdge;
class MHalfedge;
class MPolyFace;
// 点定义
class MVert
{
private:
int index_;// 编号, 从0开始
MPoint3 point_; // 坐标
MHalfedge* he_; // 从该点出发的一条半边,尽量设置成边界边(如果有)
public:
MVert() : index_(-1), point_(0, 0, 0), he_(nullptr){
}
MVert(double x, double y, double z) : index_(-1), point_(x, y, z), he_(nullptr) {
}
~MVert() {
index_ = -1; }
public:
MHalfedge* const halfEdge() {
return he_; }
const MHalfedge* const halfEdge() const {
return he_; }
void setHalfedge(MHalfedge* he) {
he_ = he; }
void setPosition(MPoint3 new_point) {
point_ = new_point; }
void setPosition(double x, double y, double z) {
point_ = MPoint3(x, y, z); }
MPoint3 position()  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7590
7590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









