






在上一个文章卫星导航定位中的时间之一:北斗时、GPS时,联合定位中的时间处理中我们介绍了北斗时(BDT)、GPS时(GPST)的基本概念、GPST和BDT在双系统联合定位中的应用。
本次我们将介绍:
-
• 世界时 UT1 与协调世界时 UTC 的定义;
-
• 北斗时、GPS时与 UTC 的关系;
-
• GNSS 接收机如何获取 UTC 时间。
国际原子时TAI
在上一个文章中我们提到了国际单位制(SI)秒的定义:

国际单位制SI秒定义
我们很自然的就会想到:虽然铯原子钟的精度非常高,但是个体之间仍然存在差异。作为国际标准的时间系统,肯定不可能只用某一个铯原子钟做基准,应该用很多的铯原子钟的时间做加权平均。
事实上也是这样的,作为国际标准的时间基准,国际原子时(TAI),是由全球数百个原子钟的读数加权平均后形成的一种高度均匀、连续的时间尺度,每100万年误差不超过1秒。
世界时UT1和协调世界时UTC
世界时UT1
世界时(UT1),是基于地球自转所定义的时间尺度,反映了地球相对于遥远恒星的实际角位置,在实际应用中,UT1是相对于国际地球参考框架来确定的。
可以这么理解,世界时UT1的流逝速度与地球自转的速率密切相关。如果地球自转是匀速的,那么UT1的流逝速度也将是均匀的、稳定的。
但实际上,地球自转受到多种因素影响,例如:
-
• 月球和太阳的引力与潮汐作用;
-
• 地球内部物质运动(如地核与地幔的对流);
-
• 大气和海洋质量分布的变化。
这些因素会导致 UT1 的流逝速度产生微小波动。虽然波动幅度较小,但在高精度的卫星导航领域仍不可忽略。
因此世界时UT1更多的被视为一种天文时间,不适合为日常生活中使用的“钟表时间”。
协调世界时UTC
UTC 时是目前国际上最主要的标准时间系统,我们日常生活中使用的手机、电脑、广播电视中等设备显示的时间,几乎都基于 UTC。
新闻报道中常提及的“格林威治时间 GMT”,在现代语境下通常也指的是 UTC。而北京时间则是 UTC+8 小时。
UTC时间是“既要又要”的时间系统。
-
• UTC采用 TAI 的稳定流逝速度,具有极高的均匀性和稳定性;
-
• 同时通过引入“闰秒”机制,使 UTC 与地球自转保持大致同步。
由于地球自转不均匀,UTC 与 UT1 的差异会逐渐增大。为了控制这种偏差,人们引入了 闰秒机制。
闰秒机制
UT1 与 UTC 之间的关系,可以用一个简单的公式来表示:UT1 - UTC = ΔT。这个差值ΔT直观地反映了地球自转相对于原子时标的快慢。
为了将ΔT控制在一个较小的、可接受的范围内,人们想到了采用闰秒的方法,通过在某个特定的时间点插入闰秒,确保 UTC时间 既具备原子时的高度稳定性,又能与地球自转保持大致同步。
国际上有一个专门的组织:国际地球自转服务(International Earth Rotation and Reference Systems Service,IERS),这是一个负责监测地球自转和维护全球参考框架的国际组织。他们会定期定期发布地球自转参数和闰秒信息,决定在什么时间点在UTC时间中插入闰秒。
按照IERS的相关公告:当 UTC 与 UT1 的差值接近 ±0.9 秒时, UTC时间插入或删除一秒(从历史上看绝大多数情况都是插入一秒),最终的目的是保持UTC和UT1的差值 ΔT永远在0.9s以内。
这个插入闰秒的时间点通常在某年的6 月 30 日或 12 月 31 日的最后一分钟进行。
比如:
在插入闰秒时,UTC 时间会从 23:59:59 直接跳到 23:59:60,然后再进入下一天的 00:00:00。
而UT1时间始终是连续的,会按照正常的、连续的流逝速度跨过午夜。UT1时间从 23:59:59 直接跳到下一天的 00:00:00。
通过这种闰秒协调机制,UTC 既保持了原子时的高稳定性,又最大程度地贴合了地球自转的实际情况,为全球各个领域提供了可靠的时间基准。
北斗时、GPS时和UTC时
在上一个文章中,我们提到了北斗时是北斗卫星导航系统内部维持的时间系统,而GPS时是GPS卫星导航系统内部维持的时间系统。北斗时和GPS时都是基于原子钟的,是连续的时间尺度,不存在闰秒,一旦开始计数,就始终以原子时的速率均匀的前进,不会因为地球自转速度的不均匀而调整。
GPS时间是UTC时间1980年1月6日00:00:00时刻开始的,在那个时刻,GPST=UTC,两者是同步的,但是由于UTC会在某些时刻插入闰秒,而GPST时间没有闰秒,所以UTC和GPST之间会产生一个整数秒的累计差值,这个差值就是当前的闰秒数。在2017年1月1日,UTC累计引入了18个闰秒,而2017年至今,UTC没有引入新的闰秒,所以目前UTC=GPST-18。
同理,北斗时间是UTC时间2006年1月1日00:00:00时刻开始的,在那个时刻,BDT=UTC,两者是同步的。由于UTC会插入闰秒,所以UTC和BDT之间也会产生一个整数秒的差值。从2006年1月1日到今天,UTC引入了4次闰秒(2008年12月31日、2012年6月30日、2015年6月30日和2016年12月31日),所以目前UTC=BDT-4;
GNSS接收机如果获得卫星时间和UTC的差值
GPS卫星和北斗卫星播发的导航电文中带有卫星时间GPST、BDT和UTC的差值,GNSS接收机在接收到卫星信号后,会解析导航电文,并从导航电文中读取UTC修正参数。利用UTC修正参数,GNSS接收机可以将自己内部计算出的GPST或BDT转换为标准的UTC时间,并输出给用户。
当UTC发生新的闰秒时,国际地球自转服务(IERS)会提前公布,GNSS主控站也会更新导航电文中的闰秒参数,卫星也会广播这些更新后的信息,GNSS接收机在收到这些更新后会自动调整其UTC转换逻辑。
由于卫星时间GPST、BDT和UTC的差值修正参数是在卫星广播的电文中播发,但是差值修正参数重新播发的周期较长。为了避免GNSS接收机上电之后,由于没有及时收到电文中的UTC修正参数导致刚开始定位的时候,输出的UTC时间出现错误。卫星播发的电文中会提前告知UTC闰秒发生的时刻,给GNSS接收机留出足够的时间来调整UTC闰秒。
根据GPS官方的ICD文件IS-GPS-200 §20.3.3.5.2.4 。在GPS卫星播发的导航电文中会广播UTC修正参数,包括:
-
• A0(UTC与GPST的非整数秒偏移量);
-
• A1(偏移量的变化率);
-
• WN(闰秒生效的GPS周数)和DN(闰秒生效的GPS周内天数)
-
• △Ts(当前的闰秒总数)
通过这些参数,GNSS接收机可以精确地计算出当前的UTC=GPST-(当前的闰秒总数+A0+A1×(tepsT-tref)。
同理,在北斗卫星播发的导航电文中,有北斗时BDT和UTC的时间同步参数。
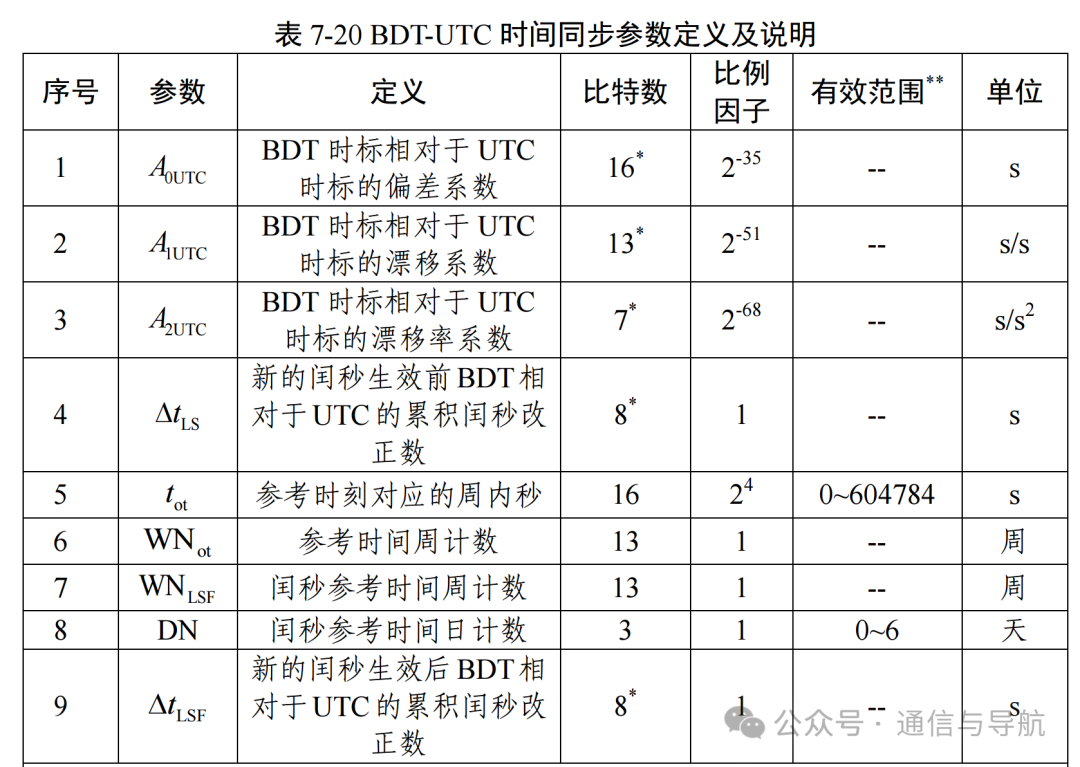
北斗导航电文中的北斗时和UTC修正参数
其中闰秒参考时间周计数WNlsf和闰秒参考时间日计数DN,就代表了闰秒发生的时刻。只要GNSS接收机收到了这个信息,就可以把信息存储在存储器中。下次上电开机的时候,即使GNSS接收机没有收到导航电文中的UTC修正参数,也能从存储器中读取UTC闰秒发生的时刻,从而决定当前是否需要调整输出的UTC闰秒。
GNSS接收机读取UTC修正参数之后,按照给定的公式,就可以计算出北斗时和UTC时间的差值,然后输出定位信息。目前GNSS接收机输出的数据信息中,时间一般都用UTC时间。比如NMEA0183语句中,时间就是UTC时间。
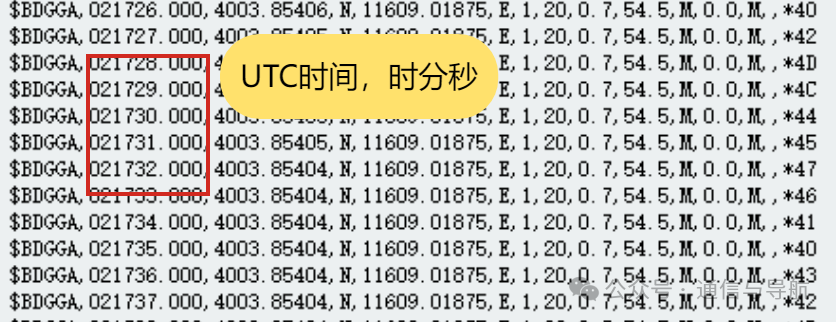
GGA语句中的UTC时间时分秒
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









