



双向数据通信是北斗卫星导航系统的一大特色。地面上的两个北斗终端能够以北斗卫星作为中继,实现双向数据通信,为沙漠、戈壁、海洋、山区等地面网络信号无法完全覆盖的地区提供了一种非常重要的通信手段。
北斗卫星通信系统的信号流程采用的是“终端 - 卫星 - 信关站 - 卫星 - 终端”的模式,具体信号流程如下所示:
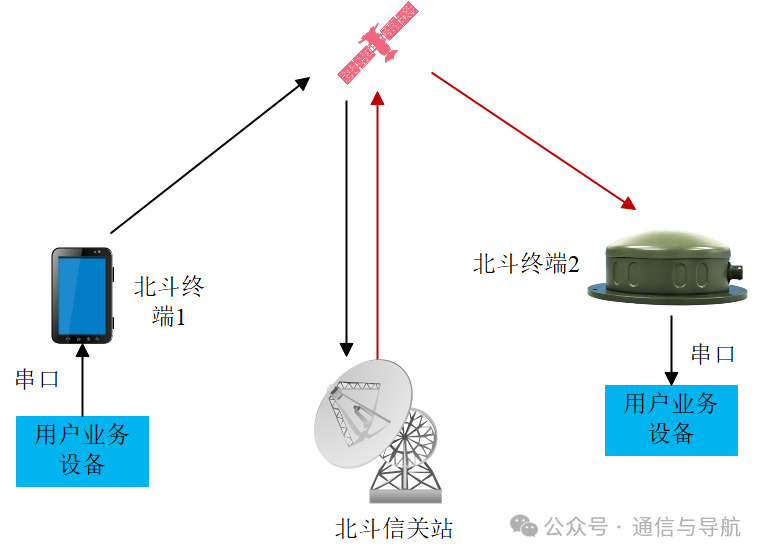
北斗通信信号流程图
北斗终端1要给北斗终端2发送短消息。
终端1将业务数据进行编码、调制之后通过天线发射出去,北斗卫星接收到信号后对其进行放大、变频等处理,然后转发至地面信关站。信关站接收信号后,进行解调、解析、处理,并生成新的数据帧,重新调制后再次将信号发回卫星。卫星再次对其放大、变频、转发,终端2接收到信号后将其转换为业务数据,输出给用户设备。
我们常用的北斗通信终端一般用于地面、车载、船载、无人机等应用场景,这些场景下的运动速度较低,北斗双向通信没有问题。
如果北斗终端1安装在高速运动的载体上,而北斗终端2放置在地面,需要实现的功能是:将高速载体上的关键信息传输到地面。那么在这种高速运动的场景下,北斗终端1发送的信息,北斗终端2还能正常接收吗?如果不能,如何保证终端2能正常接收信息?
在高速运动的场景下,必须考虑多普勒频移的影响。
多普勒频移的原理
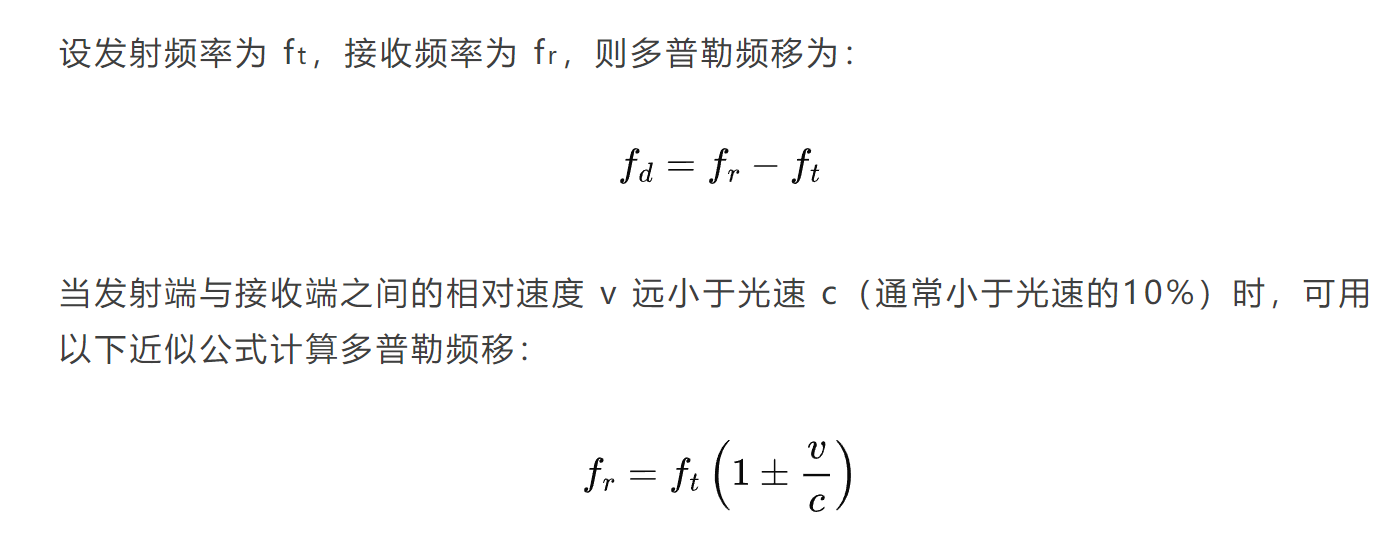
当发射端向接收端发射信号时,若两者之间不存在相对运动,则接收频率等于发射频率。但若两者之间存在相对运动,接收信号的频率就会发生变化。
其中:
-
• fr:接收频率;
-
• ft:发射频率;
-
• v:发射端与接收端之间的相对速度;
-
• c:光速,约为 3×10⁸ m/s。
当发射端和接收端相互靠近时,取“+”号,接收频率大于发射频;远离时取“-”号,接收频率小于发射频率。
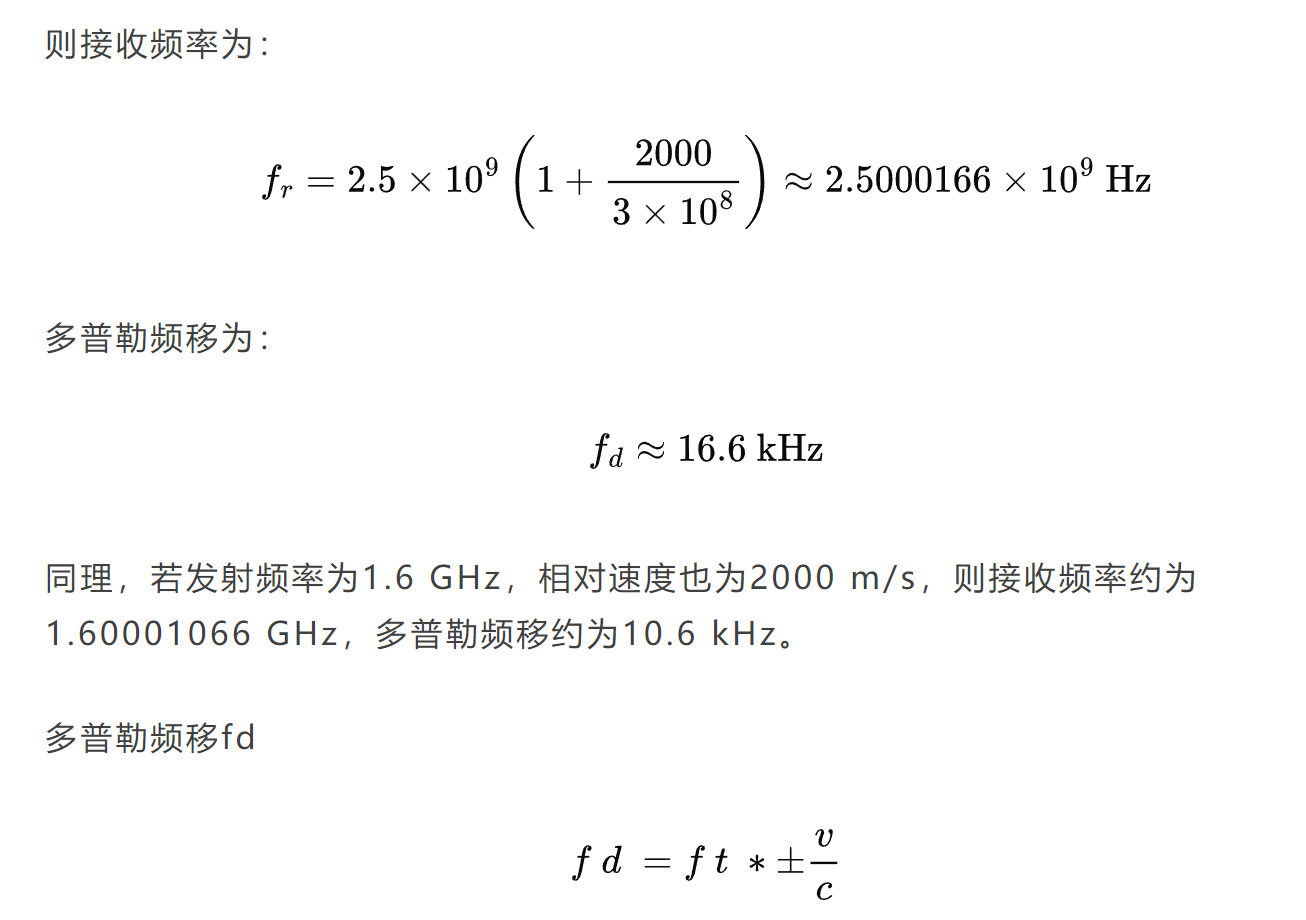
示例计算:
已知:
-
• 发射频率 ft = 2.5 GHz = 2.5×10⁹ Hz;
-
• 相对速度 v = 2000 m/s;
-
• 光速 c = 3×10⁸ m/s;
-
• 发射端和接收端两者相互靠近。
北斗入站信号的频偏范围
正如前面所述,在北斗通信流程中,终端1发射的信号经卫星转发至地面信关站,信关站需对接收信号进行解调处理。因此,解调器能容忍的最大频偏是一个关键参数。
北斗区域RDSS通信使用的卫星为地球同步轨道(GEO)卫星,其相对于地面基本静止。因此,地面固定设备(如信关站、终端2)因卫星运动引起的多普勒频移很小。
例如,北斗GEO卫星存在轨道定点漂移(约±0.1°),导致与地面站之间产生 ±50 m/s 的相对速度。对应的多普勒频移为:
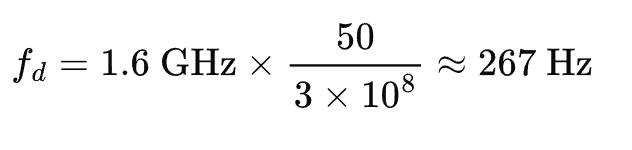
因此,引起多普勒频移的主要因素是高速运动下终端1与卫星之间的相对速度。
根据《航空辅助监视北斗机载设备规范》《北斗卫星导航系统用户终端通用技术要求》《北斗三号民用RDSS模组产品规范》等文档的规定,RDSS终端发射的入站申请信号中心频率与标称频率的频偏应满足以下条件:
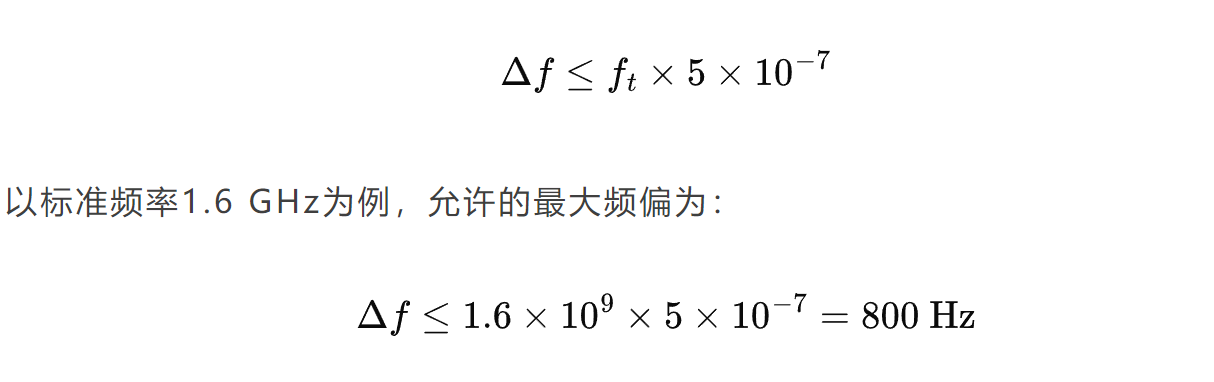
然而,高速运动产生的多普勒频移往往超过这一限制。因此,若北斗终端1按标称频率1.6 GHz发射信号,地面信关站可能无法正常解调。
解决方案:发射频率补偿机制
北斗终端1在发射信号的同时也接收卫星信号。北斗卫星下行发射频率约为2.5 GHz,假设终端1与卫星之间存在相对速度 v,且二者不断靠近。
此时终端1接收到的卫星信号多普勒频移为:
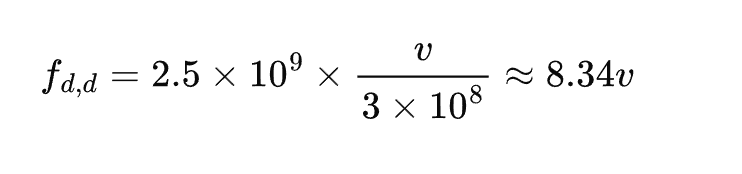
该频移值可在北斗接收机基带信号处理的PLL环路中测量得到。
由此可得终端与卫星的相对速度:

要想终端发射的信号到达卫星的时候,接收频率 fr 等于标准频率1.6GHz,终端实际应该发射信号的频率 ft,a 是多少?
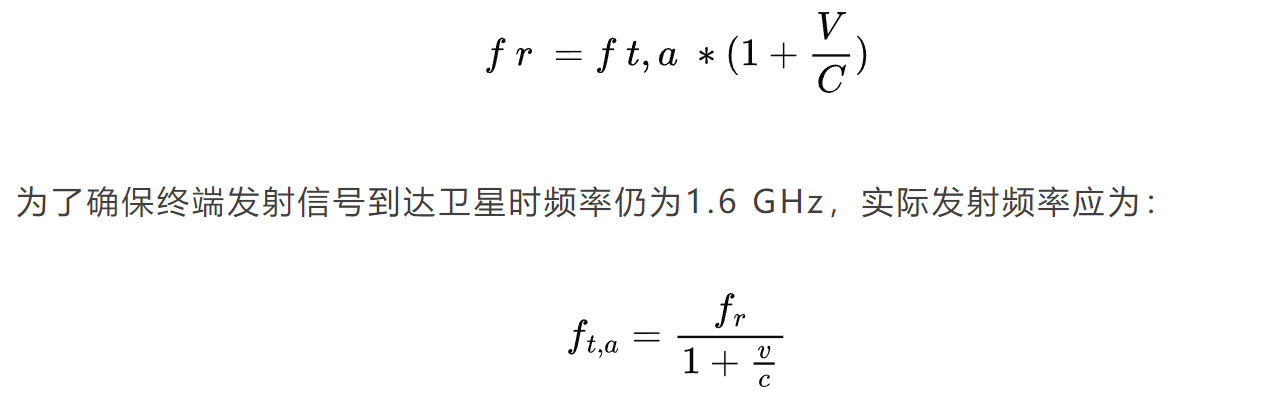
上式中的V用v = fd,d/8.34代入。
我们发现 fr = 1.6 GHz 是已知量,接收多普勒频移fd,d是测量值,即可求得实际发射频率ft,a。
测量和补偿的时间差
在高速运动的场景下,多普勒频偏也是不断变化的,接收通道得到了多普勒频偏,然后计算相对速度,再计算实际发射信号频率,中间存在计算延迟。在时间差时段内,多普勒频偏已经发生变化,导致补偿不充分,影响补偿效果。
但在工程实践中,并不需要单独计算相对速度 v,而是直接利用基带信号处理模块(一般在FPGA内实现),接收PLL环路跟踪获取的fd,d来实时计算发射信号频率,然后实时调整发射频率,从而最大程度减少测量与补偿之间的时间差,确保补偿的时效性和准确性。
总结
北斗 RDSS 短报文通信在高动态环境下面临的主要挑战是多普勒频移过大,超出卫星接收模块的容忍范围。通过对接收信号的多普勒频移进行测量,并据此对发射频率进行实时补偿,可以有效提升北斗终端在高速、高加速度场景下的适应性。
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。
推荐阅读:

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









