







 本文介绍了KAT论文中如何利用卡尔曼滤波器进行快速遮挡对象跟踪。卡尔曼滤波是一种能结合历史数据预测和修正当前状态的滤波方法,尤其适用于处理存在噪声的数据。在论文中,滤波器评估的是对象区域像素值的动态变化,而非仅仅位置。算法基于模板匹配并考虑仿射变换参数,通过梯度下降求最优解,以适应目标形状变化,特别是刚性和非刚性目标的不同情况。
本文介绍了KAT论文中如何利用卡尔曼滤波器进行快速遮挡对象跟踪。卡尔曼滤波是一种能结合历史数据预测和修正当前状态的滤波方法,尤其适用于处理存在噪声的数据。在论文中,滤波器评估的是对象区域像素值的动态变化,而非仅仅位置。算法基于模板匹配并考虑仿射变换参数,通过梯度下降求最优解,以适应目标形状变化,特别是刚性和非刚性目标的不同情况。
1.Kalman filters
简单地说,卡尔曼滤波器的目的是要在一系列的有噪声的数据中(t-1),估计在某一个时刻t系统的状态。然后根据得到的这一时刻的状态,对卡尔曼的模型进行修正,然后再对t+1时刻的状态进行预测。
总的来说,卡尔曼滤波器总共包括两大块:
1)预测模型(prediction mode )
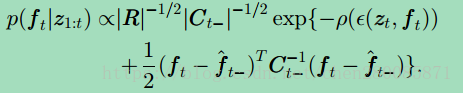
在该篇论文中,其服从的分布模型如下,W衡量的是不同时刻外貌特征的波动情况

 ,其中
,其中
通过把两个模型结合起来,可以得到最终得后验概率分布:
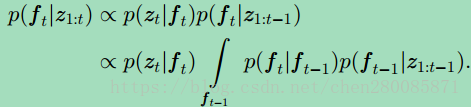
可以知道,t时刻的情况与t-1时刻的情况是密切相关的,同时t-1时刻又与t-2时刻的情况是密切相关的,所以可以说是根据前面t-1时刻的情况来估计t时刻的情况,然后根据得到的t时刻的值来进行再一次的修正,以便估计t+1时刻的值。
特别重要的说明:
第一:卡尔曼滤波器的滤波不是平常意义上的滤波,而是可以综合前面t-1时刻的含有噪声的数据,最好的对下一时刻的状态进行预测的一种滤波,所以综合了前面了噪声,而在当前可以去掉噪声,所以也把这种方式称之为滤波。
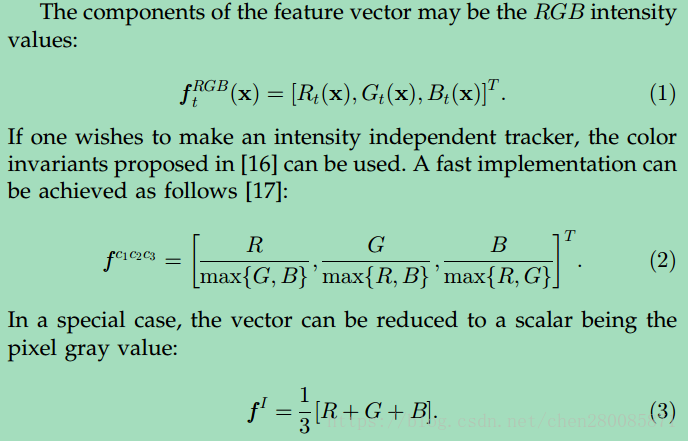
第二:卡尔曼评估的对象是多种多样的,比如在追踪的例子中,我们可能自然想到的是把目标的位置作为卡尔曼滤波要评估的对象,但是在该篇所用的文章中,卡尔曼滤波器评估的动态变化对象是对象区域中每个点的像素值。
2.算法的思想
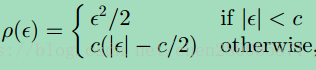
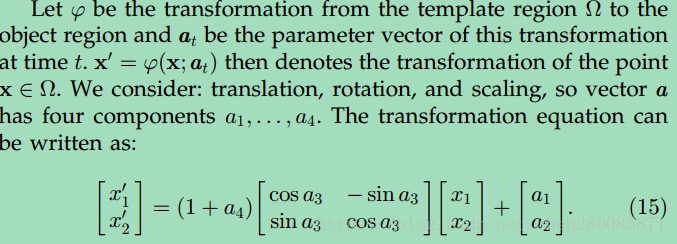
最基本的还是基于template matching的方法,只是对于模板的形状加入了类似于仿射变换的参数,然后求出最优的值。其优化的目标为:


使用梯度下降的方法求出最优的解,然后把求出的解再直接传入到预测模型中,然后经过一系列的计算,更新模板的值。
对于rigid的目标对象, 在目标对象的内部,没有类似像素位置发生变化的点,所以在追踪的时候,对象形状的变化可以用类似于仿射变换这样的线性变为来进行表示。但是在deformable的对象目标,其形状有像素点位置的变化,所以,不能用这样的方式来表示。
参考博文:
https://blog.youkuaiyun.com/u010720661/article/details/63253509


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









