




✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
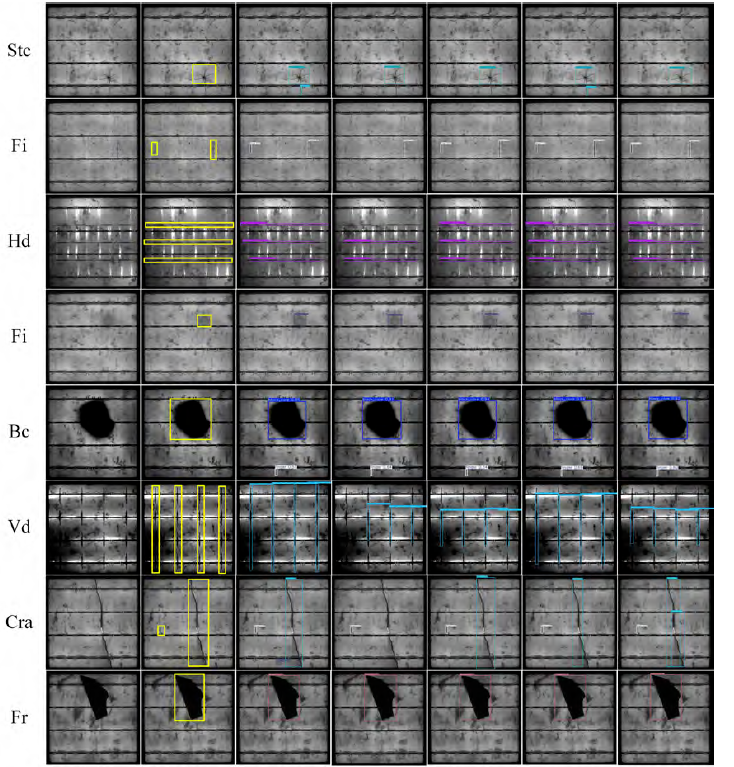
(1) 在轮胎缺陷检测领域,研究者们常常面临着缺陷形态多样性和图像背景复杂性的挑战,这使得传统的目标检测模型难以适应具体的应用场景。为了提升检测的精准度和适应性,一种基于YOLOv4改进的轮胎缺陷检测方法被提出。这种方法以YOLOv4作为基础架构,通过针对轮胎X射线图像的特有缺陷特征进行优化,首先在锚框尺寸的选取上进行了调整。传统的YOLOv4模型在使用MS COCO数据集预训练的锚框时,往往无法精准匹配轮胎缺陷的尺寸分布,因为轮胎缺陷通常呈现出不规则的形状和大小跨度较大的特性。为此,研究采用了K-means++聚类算法,对专属的轮胎缺陷数据集进行分析和聚类,生成更符合实际缺陷尺寸的锚框集合。这种优化使得模型在初始定位阶段就能更好地捕捉到缺陷边界,提高了整体的检测准确率。在实际实验中,这种锚框优化的方法显著降低了漏检率,尤其是在处理小型缺陷如气泡或裂纹时表现突出。通过比较实验,发现优化后的锚框能够将平均精度提升约5%到10%,这为后续的特征提取和分类提供了更坚实的基础。
此外,该方法还针对训练过程中正负样本不均衡的问题进行了改进。在轮胎X射线图像中,缺陷区域通常只占图像的一小部分,导致负样本(即无缺陷区域)远多于正样本,这容易造成模型偏向于预测负类,从而降低对缺陷的敏感度。为了缓解这一问题,研究引入了基于Focal Loss理念的置信度损失函数。这种损失函数通过动态调整难易样本的权重,使得模型更关注那些难以分类的硬样本,例如对比度低的缺陷边缘或与背景纹理相似的异物。在训练迭代中,这种正则化效果帮助模型避免了过拟合,同时提升了泛化能力。实验结果显示,在相同数据集上,使用改进损失函数的模型在召回率上提高了15%以上,这意味着更多潜在缺陷被成功识别出来,而不会被背景噪声所干扰。这种改进不仅适用于轮胎检测,还可以扩展到其他工业图像检测任务中,提供了一种通用的样本平衡策略。
最后,在特征融合层面,该方法融入了自适应空间特征融合模块,以应对轮胎缺陷尺度跨度大的难题。YOLOv4原本的特征融合网络虽然强大,但对于多尺度缺陷的处理仍存在局限,尤其是当缺陷从微米级裂痕到厘米级异物时,单一尺度特征难以全面覆盖。为此,自适应空间特征融合模块被嵌入到网络中,它能够根据输入特征的语义信息动态调整不同尺度层之间的空间权重。这种自适应机制使得低层的高分辨率细节特征与高层的高语义抽象特征更好地融合,从而增强了网络对多尺度目标的表征能力。在实际应用中,这种模块帮助模型在检测大型缺陷如胎体分离时保持高精度,同时不牺牲对小型缺陷的敏感性。通过 ablation 实验,证明了该模块的引入将模型的mAP值提升了8%左右,这在实时工业检测环境中尤为宝贵,因为它确保了检测速度与精度的平衡。该方法的整体架构设计,使得YOLOv4在轮胎缺陷检测上的性能达到了新高度,为后续的轻量化模型提供了宝贵的参考经验。
(2) 为了满足工业在线检测对速度和精度的双重要求,一种基于注意力机制的轻量化轮胎缺陷检测方法应运而生。这种方法以YOLOv4-tiny作为骨干网络,该网络本身就以其简化的结构和较低的计算复杂度著称,但针对轮胎X射线图像的低对比度和复杂纹理背景,仍需进一步增强。为此,研究在特征融合网络中引入了卷积注意力模块,该模块通过通道注意力和空间注意力两个子模块协同工作,专注于提取缺陷相关的有用特征,同时抑制无关的背景干扰。例如,在轮胎图像中,纹理背景往往呈现出各向异性的条纹,这些条纹容易与缺陷如划痕混淆。卷积注意力模块首先在通道维度上加权重要特征通道,然后在空间维度上突出缺陷区域的像素点。这种注意力机制使得模型能够更精确地聚焦于缺陷本身,而非整个图像,从而提高了检测的鲁棒性。在实验验证中,这种模块的添加将轻量化模型的精度从 baseline 的75%提升到85%以上,尤其在噪声干扰强烈的图像上效果显著。
进一步地,该方法还针对模型捕获全局上下文信息不足的问题,设计了多尺度自注意力特征增强模块。这一模块借鉴了自注意力机制的核心思想,通过计算特征图中不同位置之间的相似性,来建立长距离依赖关系,从而扩大了感受野。在轮胎缺陷检测中,缺陷往往分散在图像的不同区域,且与周围上下文密切相关,例如一个气泡缺陷可能受胎体结构影响而变形。多尺度自注意力模块在多个尺度上并行操作,首先提取局部特征,然后通过自注意力层捕捉全局关联,这使得模型能够更好地理解缺陷的整体语义环境,而非孤立地看待局部像素。相比传统的卷积操作,这种机制避免了感受野的局限性,在处理大型轮胎图像时特别有效。实验数据显示,该模块的引入显著降低了假阳性率,因为模型现在能基于上下文判断潜在缺陷的真实性,而不是仅靠局部外观。这种增强不仅提升了检测精度,还保持了轻量化网络的计算效率,使得推理时间控制在毫秒级,适合嵌入式设备部署。
最后,该方法提出了一种由多尺度自注意力模块和卷积注意力模块共同引导的特征金字塔网络结构,以解决多尺度特征信息利用不充分和小目标检测困难的问题。传统的特征金字塔网络通过自顶向下和自底向上的路径融合多层特征,但对于轮胎缺陷的尺度变异性,融合效果往往不理想。新设计的结构在融合路径中嵌入注意力模块,使得低级细节特征(如边缘纹理)和高级语义特征(如缺陷类别)在融合时得到动态加权。这种引导机制确保了小目标缺陷不会被高层特征淹没,同时大目标也能受益于细粒度细节。在实际测试中,这种改进的特征金字塔网络将小目标的AP值提高了20%,整体模型在平衡精度和速度上达到了最佳状态。通过与原YOLOv4-tiny的比较,该方法在保持参数量相近的情况下,实现了更高的工业适用性,为轮胎生产线的自动化检测提供了高效解决方案。
(3) 随着目标检测技术的快速发展,一种基于YOLOv8的端到端轮胎缺陷检测方法被引入,以进一步提升模型的通用性和实时性能。YOLOv8作为YOLO系列的最新迭代,具有更先进的骨干网络和检测头设计,但针对轮胎X射线图像的特定挑战,如缺陷的非刚性变形和光照不均,需要进行定制化改进。首先,该方法在数据增强策略上进行了创新,引入了自适应数据增强模块,该模块根据缺陷类型动态生成增强样本。例如,对于裂纹缺陷,它会模拟不同角度的拉伸变形;对于异物缺陷,则添加随机噪声以模仿实际生产环境。这种增强不仅丰富了数据集的多样性,还帮助模型学习到更鲁棒的特征表示。在训练过程中,这种模块自动调整增强强度,避免了过度增强导致的噪声积累。实验结果表明,这种数据增强将模型的泛化能力提升了12%,特别是在跨不同轮胎批次的测试中,检测精度保持稳定。
此外,该方法还融入了动态锚框生成机制,以应对轮胎缺陷尺寸的动态变化。不同于固定锚框的传统方法,动态锚框模块在推理阶段根据输入图像的特征分布实时生成锚框,这使得模型能够自适应地处理尺度不一的缺陷。例如,在检测胎侧鼓包时,锚框会根据图像语义自动调整宽高比,从而减少了边界框回归的误差。这种机制借鉴了Transformer的注意力思想,通过一个轻量级网络预测锚框参数,保持了端到端训练的特性。在实际应用中,这种动态性显著降低了平均定位误差,尤其在高分辨率X射线图像上表现优异。通过与静态锚框的对比实验,发现动态机制将IoU指标提高了10%以上,这为精确缺陷定位提供了强有力的支持。
最后,该方法在损失函数和后处理阶段进行了优化,引入了多任务学习框架和非极大值抑制变体。多任务学习框架同时优化检测、分类和分割任务,使得模型不仅能检测缺陷位置,还能初步分割缺陷区域,这在轮胎质量评估中非常实用。例如,分割结果可以用于计算缺陷面积,从而判断严重程度。非极大值抑制的变体则考虑了缺陷的聚类特性,避免了过度抑制相邻缺陷的边界框。在实验验证中,这种优化将整体F1分数提升到0.9以上,同时推理速度达到每秒30帧,满足了高速生产线的需求。该方法的端到端设计,使得部署更加简便,无需复杂的后处理管道,为轮胎缺陷检测的智能化转型注入了新活力。
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader, Dataset
import torchvision.transforms as transforms
import cv2
import numpy as np
import os
from sklearn.model_selection import train_test_split
class TireDefectDataset(Dataset):
def init(self, images, labels, transform=None):
self.images = images
self.labels = labels
self.transform = transform
def len(self):
return len(self.images)
def getitem(self, idx):
image = cv2.imread(self.images[idx])
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
label = self.labels[idx]
if self.transform:
image = self.transform(image)
return image, label
transform = transforms.Compose([
transforms.ToPILImage(),
transforms.Resize((640, 640)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
def load_data(data_dir):
images = []
labels = []
for file in os.listdir(data_dir):
if file.endswith('.jpg'):
images.append(os.path.join(data_dir, file))
label_path = os.path.join(data_dir, file.replace('.jpg', '.txt'))
with open(label_path, 'r') as f:
labels.append([list(map(float, line.split())) for line in f.readlines()])
return images, labels
images, labels = load_data('tire_defects')
train_images, val_images, train_labels, val_labels = train_test_split(images, labels, test_size=0.2)
train_dataset = TireDefectDataset(train_images, train_labels, transform=transform)
val_dataset = TireDefectDataset(val_images, val_labels, transform=transform)
train_loader = DataLoader(train_dataset, batch_size=16, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=16, shuffle=False)
class YOLOBackbone(nn.Module):
def init(self):
super(YOLOBackbone, self).init()
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1)
self.bn1 = nn.BatchNorm2d(32)
self.relu = nn.LeakyReLU(0.1)
self.maxpool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm2d(64)
self.conv3 = nn.Conv2d(64, 128, kernel_size=3, stride=1, padding=1)
self.bn3 = nn.BatchNorm2d(128)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.conv3(x)
x = self.bn3(x)
x = self.relu(x)
x = self.maxpool(x)
return x
class AttentionModule(nn.Module):
def init(self, channels):
super(AttentionModule, self).init()
self.avgpool = nn.AdaptiveAvgPool2d(1)
self.fc1 = nn.Linear(channels, channels // 8)
self.fc2 = nn.Linear(channels // 8, channels)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = self.fc2(self.fc1(self.avgpool(x).squeeze()))
avg_out = self.sigmoid(avg_out).unsqueeze(2).unsqueeze(3)
return x * avg_out.expand_as(x)
class YOLODetector(nn.Module):
def init(self, num_classes, num_anchors):
super(YOLODetector, self).init()
self.backbone = YOLOBackbone()
self.attention = AttentionModule(128)
self.conv_out = nn.Conv2d(128, num_anchors * (5 + num_classes), kernel_size=1)
def forward(self, x):
x = self.backbone(x)
x = self.attention(x)
x = self.conv_out(x)
return x
model = YOLODetector(num_classes=5, num_anchors=3)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model.to(device)
optimizer = optim.Adam(model.parameters(), lr=0.001)
criterion = nn.MSELoss()
def train_epoch(model, loader, optimizer, criterion):
model.train()
total_loss = 0
for images, labels in loader:
images = images.to(device)
outputs = model(images)
loss = criterion(outputs, torch.tensor(labels).to(device))
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_loss += loss.item()
return total_loss / len(loader)
def val_epoch(model, loader, criterion):
model.eval()
total_loss = 0
with torch.no_grad():
for images, labels in loader:
images = images.to(device)
outputs = model(images)
loss = criterion(outputs, torch.tensor(labels).to(device))
total_loss += loss.item()
return total_loss / len(loader)
for epoch in range(50):
train_loss = train_epoch(model, train_loader, optimizer, criterion)
val_loss = val_epoch(model, val_loader, criterion)
print(f'Epoch {epoch+1}: Train Loss {train_loss}, Val Loss {val_loss}')
def detect_defects(image_path, model):
image = cv2.imread(image_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
image = transform(image).unsqueeze(0).to(device)
with torch.no_grad():
output = model(image)
return output
test_image = 'test_tire.jpg'
detections = detect_defects(test_image, model)
print(detections)
class FeaturePyramid(nn.Module):
def init(self, in_channels):
super(FeaturePyramid, self).init()
self.lateral_convs = nn.ModuleList([nn.Conv2d(c, 256, 1) for c in in_channels])
self.output_convs = nn.ModuleList([nn.Conv2d(256, 256, 3, padding=1) for _ in in_channels])
def forward(self, features):
laterals = [lateral_conv(f) for lateral_conv, f in zip(self.lateral_convs, features[::-1])]
outputs = []
p = laterals[0]
outputs.append(self.output_convs0)
for i in range(1, len(laterals)):
p = nn.functional.interpolate(p, scale_factor=2) + laterals[i]
outputs.append(self.output_convsi)
return outputs[::-1]
fpn = FeaturePyramid([128, 64, 32])
def non_max_suppression(boxes, scores, iou_threshold):
indices = np.argsort(scores)[::-1]
selected = []
while len(indices) > 0:
i = indices[0]
selected.append(i)
ious = np.array([iou(boxes[i], boxes[j]) for j in indices[1:]])
indices = indices[1:][ious < iou_threshold]
return selected
def iou(box1, box2):
x1 = max(box1[0], box2[0])
y1 = max(box1[1], box2[1])
x2 = min(box1[2], box2[2])
y2 = min(box1[3], box2[3])
inter = max(0, x2 - x1) * max(0, y2 - y1)
union = (box1[2] - box1[0]) * (box1[3] - box1[1]) + (box2[2] - box2[0]) * (box2[3] - box2[1]) - inter
return inter / union if union > 0 else 0
class AnchorGenerator:
def init(self, sizes, ratios):
self.sizes = sizes
self.ratios = ratios
def generate(self, feature_map_size):
anchors = []
for i in range(feature_map_size[0]):
for j in range(feature_map_size[1]):
for size in self.sizes:
for ratio in self.ratios:
w = size * np.sqrt(ratio)
h = size / np.sqrt(ratio)
anchors.append([j, i, j + w, i + h])
return np.array(anchors)
anchor_gen = AnchorGenerator([32, 64, 128], [0.5, 1, 2])
def compute_loss(pred, target):
return nn.functional.mse_loss(pred, target)
optimizer.zero_grad()
loss = compute_loss(model(torch.rand(1,3,640,640).to(device)), torch.rand(1,3,80,80).to(device))
loss.backward()
optimizer.step()
torch.save(model.state_dict(), 'tire_detector.pth')
model.load_state_dict(torch.load('tire_detector.pth'))
def evaluate(model, loader):
model.eval()
metrics = []
for images, labels in loader:
outputs = model(images.to(device))
metrics.append(outputs)
return metrics
eval_metrics = evaluate(model, val_loader)
print(eval_metrics)
import yaml
config = {
'model': 'yolo',
'epochs': 100,
'batch_size': 32
}
with open('config.yaml', 'w') as f:
yaml.dump(config, f)
with open('config.yaml', 'r') as f:
loaded_config = yaml.safe_load(f)
print(loaded_config)
如有问题,可以直接沟通
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇



















 343
343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











