




前言
在 CNC 加工和精密运动控制领域,运动规划的性能直接决定了加工效率、表面质量和设备寿命。GRBL 作为一款高效、轻量的开源运动控制固件,其核心算法之一——速度前瞻(Look-Ahead),在复杂路径的连续运动中发挥着关键作用。通过动态调整运动段的衔接速度,显著减少了不必要的加减速停顿,从而实现了更平滑、更高速的轨迹控制。
本文将从算法原理、实现机制剖析 GRBL1.1 的速度前瞻设计,帮助读者深入理解其如何平衡“速度”与“精度”,以及如何通过前瞻路径段实现最优加减速规划。
一.GRBL速度前瞻流程
1 .函数定义
#ifdef USE_LINE_NUMBERS
void plan_buffer_line(float *target, float feed_rate, uint8_t invert_feed_rate, int32_t line_number)
#else
void plan_buffer_line(float *target, float feed_rate, uint8_t invert_feed_rate)
#endif
这是一个条件编译的函数定义,根据USE_LINE_NUMBERS宏是否定义来决定是否包含line_number参数
参数说明:
target: 目标位置的各轴坐标数组(单位:mm)
feed_rate: 进给速率
invert_feed_rate: 标志位,表示是否使用反时间模式(即时间倒数模式)
line_number:(可选)行号,用于调试或追踪
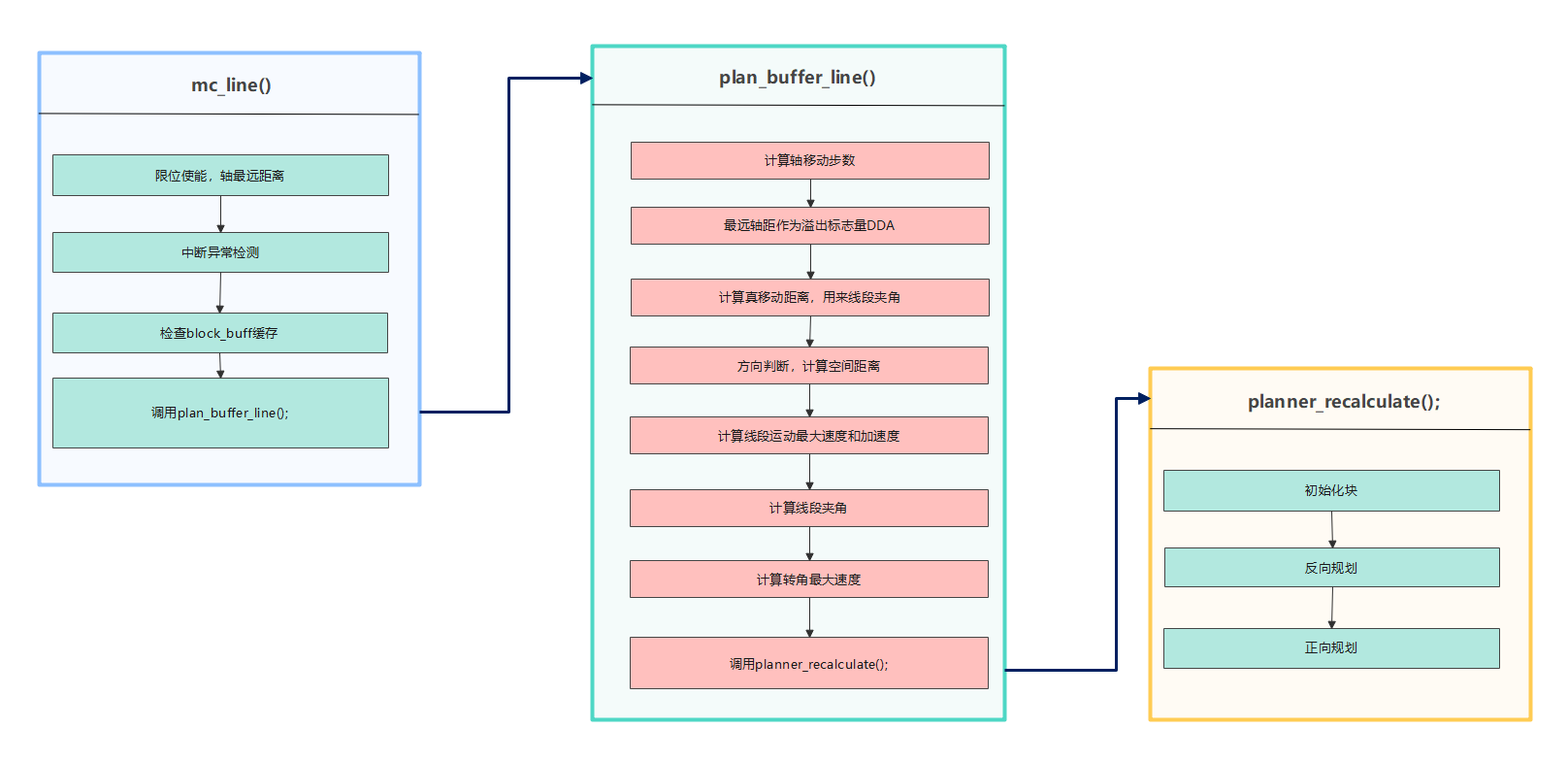
2 .流程图
以下是速度前瞻流程图
二.GRBL速度前瞻分析
1 .运动块初始化
// 获取当前缓冲区头部的运动块指针
// block_buffer是环形缓冲区,block_buffer_head指向当前要填充的块
plan_block_t *block = &block_buffer[block_buffer_head];
// 初始化运动块参数
block->step_event_count = 0; // 步进事件计数器清零,用于记录总步数
block->millimeters = 0; // 运动距离清零(mm),将计算实际运动距离
block->direction_bits = 0; // 方向位清零,每个bit代表一个轴的运动方向(0正/1负)
block->acceleration = SOME_LARGE_VALUE; // 初始化为最大值,后续会根据各轴加速度限制调整
// 如果启用了行号功能,记录当前G代码行号(用于错误报告和调试)
#ifdef USE_LINE_NUMBERS
block->line_number = line_number;
#endif
初始化运动块各字段:
step_event_count: 步进事件计数器初始化为0
millimeters: 运动距离初始化为0
direction_bits: 方向位初始化为0(每位代表一个轴的运动方向)
acceleration: 初始化为一个大值,后续会根据限制缩小
line_number: (可选)存储行号
2 .运动参数计算准备
int32_t target_steps[N_AXIS]; // 存储各轴目标位置的步数
float unit_vec[N_AXIS]; // 单位方向向量(运动方向的单位向量)
float delta_mm; // 各轴移动距离(mm)
uint8_t idx; // 轴索引
// COREXY机构特殊处理(如CoreXY、H-bot等并联机构)
#ifdef COREXY
// 计算A/B电机的目标步数 = 目标位置(mm) × 每毫米步数
// 注意:A/B电机是虚拟轴,实际控制XY运动
target_steps[A_MOTOR] = lround(target[A_MOTOR]*settings.steps_per_mm[A_MOTOR]);
target_steps[B_MOTOR] = lround(target[B_MOTOR]*settings.steps_per_mm[B_MOTOR]);
// CoreXY特殊步数计算:
// A电机步数 = |(X轴步数差 + Y轴步数差)|
// B电机步数 = |(X轴步数差 - Y轴步数差)|
block->steps[A_MOTOR] = labs((target_steps[X_AXIS]-pl.position[X_AXIS]) +
(target_steps[Y_AXIS]-pl.position[Y_AXIS]));
block->steps[B_MOTOR] = labs((target_steps[X_AXIS]-pl.position[X_AXIS]) -
(target_steps[Y_AXIS]-pl.position[Y_AXIS]));
#endif
target_steps: 目标位置步数数组
unit_vec: 单位向量数组
delta_mm: 各轴运动距离(mm)
A/B电机的目标步数 = 目标位置(mm) × 每毫米步数
对于COREXY并联机构(如H-bot、CoreXY等):
计算A、B电机的步数差(使用X、Y轴的位置差)
A电机步数 = |(ΔX + ΔY)|
B电机步数 = |(ΔX - ΔY)|
3 .各轴运动参数计算
for (idx=0; idx<N_AXIS; idx++) {
// 计算各轴步数和运动参数
#ifdef COREXY
// 对于非A/B电机轴(如Z轴)的正常计算
if (!(idx == A_MOTOR) && !(idx == B_MOTOR)) {
// 目标步数 = 目标位置(mm) × 每毫米步数,四舍五入取整
target_steps[idx] = lround(target[idx]*settings.steps_per_mm[idx]);
// 计算步数差绝对值
block->steps[idx] = labs(target_steps[idx]-pl.position[idx]);
}
// 更新最大步数(决定运动总时间)
block->step_event_count = max(block->step_event_count, block->steps[idx]);
// CoreXY特殊距离计算:
if (idx == A_MOTOR) {
// A电机移动距离 = (ΔX + ΔY)/A电机每毫米步数
delta_mm = (target_steps[X_AXIS]-pl.position[X_AXIS] +
target_steps[Y_AXIS]-pl.position[Y_AXIS])/settings.steps_per_mm[idx];
} else if (idx == B_MOTOR) {
// B电机移动距离 = (ΔX - ΔY)/B电机每毫米步数
delta_mm = (target_steps[X_AXIS]-pl.position[X_AXIS] -
target_steps[Y_AXIS]+pl.position[Y_AXIS])/settings.steps_per_mm[idx];
} else {
// 其他轴移动距离 = 步数差/每毫米步数
delta_mm = (target_steps[idx] - pl.position[idx])/settings.steps_per_mm[idx];
}
#else
// 普通笛卡尔机构计算
target_steps[idx] = lround(target[idx]*settings.steps_per_mm[idx]);
block->steps[idx] = labs(target_steps[idx]-pl.position[idx]);
block->step_event_count = max(block->step_event_count, block->steps[idx]);
delta_mm = (target_steps[idx] - pl.position[idx])/settings.steps_per_mm[idx];
#endif
// 存储移动距离(单位向量分子部分,分母后续计算)
unit_vec[idx] = delta_mm;
// 设置方向位(负方向时置位)
// direction_bits是一个位域,每个bit代表一个轴方向
if (delta_mm < 0 ) {
block->direction_bits |= get_direction_pin_mask(idx);
}
// 累计距离平方(用于后续计算欧几里得距离)
// 公式:distance² = Σ(Δx_i² + Δy_i² + Δz_i² + ...)
block->millimeters += delta_mm * delta_mm;
}
block->steps[idx]: 是当前位置到目标位置之间的步数差。
block->step_event_count:取各轴步数的最大值。
delta_mm: 每个轴方向移动的步数换算成mm。
CoreXY机构使用两个电机(A和B)协同控制XY运动,其运动学方程为:
X
=
(
A
+
B
)
/
2
Y
=
(
A
−
B
)
/
2
\begin{align*} X = (A + B)/2 \\ Y = (A - B)/2 \end{align*}
X=(A+B)/2Y=(A−B)/2
逆运动学为:
A
=
X
+
Y
B
=
X
−
Y
\begin{align*} A = X + Y \\ B = X - Y \end{align*}
A=X+YB=X−Y
目标步数 = 目标位置(mm) × 每毫米步数,四舍五入取整:
target_steps i = round ( p target , i × s i ) \text{target\_steps}_i = \text{round}(p_{\text{target},i \times s_i}) target_stepsi=round(ptarget,i×si)
步数差 = |目标步数 - 当前位置步数|:
Δ steps i = ∣ target_steps i − p current , i ∣ \Delta \text{steps}_i = |\text{target\_steps}_i - p_{\text{current},i}| Δstepsi=∣target_stepsi−pcurrent,i∣
移动距离(mm) = 步数差 / 每毫米步数:
Δ mm i = Δ steps i s i \Delta \text{mm}_i = \frac{\Delta \text{steps}_i}{s_i} Δmmi=siΔstepsi
4 .运动总距离计算
// 计算实际运动距离 = √(ΣΔx_i²)
block->millimeters = sqrt(block->millimeters);
// 检查零长度运动(理论上不应发生)
if (block->step_event_count == 0) {
return; // 如果总步数为0,直接返回
}
完成空间距离计算:
$ distance = \sqrt{(\Delta x_i^2+\Delta y_i^2+\Delta z_i^2)} $
检查零长度运动块(步数为0),如果是则直接返回;
5 .进给速率处理
if (feed_rate < 0) {
// 快速移动模式(G0),使用最大速率
feed_rate = SOME_LARGE_VALUE;
} else if (invert_feed_rate) {
// 反时间模式(G93),feed_rate实际上是时间的倒数(1/min)
// 需要转换为正常速率:速率 = 1/时间 × 距离
feed_rate *= block->millimeters;
}
// 确保不低于最小进给速率(防止步进脉冲间隔过大导致问题)
if (feed_rate < MINIMUM_FEED_RATE) {
feed_rate = MINIMUM_FEED_RATE;
}
处理不同进给速率模式:
如果feed_rate < 0:设置为一个大值(表示快速移动);
如果invert_feed_rate为真:使用反时间模式,feed_rate *= 运动距离;
确保进给速率不低于最小值MINIMUM_FEED_RATE,避免步进生成时的舍入问题
6 .路径转角计算
float inverse_millimeters = 1.0/block->millimeters; // 距离单位化计算
float junction_cos_theta = 0; // 路径转角余弦值
for (idx=0; idx<N_AXIS; idx++) {
if (unit_vec[idx] != 0) { // 只处理有运动的轴
// 计算单位向量:u_i = Δx_i / distance
unit_vec[idx] *= inverse_millimeters;
// 限制进给速率不超过各轴最大速率
// 原理:各轴分速度 = 总速度 × |u_i| ≤ 各轴最大速率
// 所以:总速度 ≤ 各轴最大速率 / |u_i|
feed_rate = min(feed_rate, settings.max_rate[idx]/fabs(unit_vec[idx]));
// 限制加速度不超过各轴最大加速度
block->acceleration = min(block->acceleration,
settings.acceleration[idx]/fabs(unit_vec[idx]));
// 计算路径转角余弦值(用于后续转角速度计算)
// cosθ = -Σ(u_prev_i × u_curr_i)
junction_cos_theta -= pl.previous_unit_vec[idx] * unit_vec[idx];
}
}
前一个向量的单位向量分量:
previous_unit_vec [ 0 ] = x 0 x 0 2 + y 0 2 + z 0 2 previous_unit_vec [ 1 ] = y 0 x 0 2 + y 0 2 + z 0 2 previous_unit_vec [ 2 ] = z 0 x 0 2 + y 0 2 + z 0 2 \begin{align*} \text{previous\_unit\_vec}[0] &= \frac{x_0}{\sqrt{x_0^2 + y_0^2 + z_0^2}} \\ \text{previous\_unit\_vec}[1] &= \frac{y_0}{\sqrt{x_0^2 + y_0^2 + z_0^2}} \\ \text{previous\_unit\_vec}[2] &= \frac{z_0}{\sqrt{x_0^2 + y_0^2 + z_0^2}} \end{align*} previous_unit_vec[0]previous_unit_vec[1]previous_unit_vec[2]=x02+y02+z02x0=x02+y02+z02y0=x02+y02+z02z0
当前向量的单位向量分量:
unit_vec [ 0 ] = x 1 x 1 2 + y 1 2 + z 1 2 unit_vec [ 1 ] = y 1 x 1 2 + y 1 2 + z 1 2 unit_vec [ 2 ] = z 1 x 1 2 + y 1 2 + z 1 2 \begin{align*} \text{unit\_vec}[0] &= \frac{x_1}{\sqrt{x_1^2 + y_1^2 + z_1^2}} \\ \text{unit\_vec}[1] &= \frac{y_1}{\sqrt{x_1^2 + y_1^2 + z_1^2}} \\ \text{unit\_vec}[2] &= \frac{z_1}{\sqrt{x_1^2 + y_1^2 + z_1^2}} \end{align*} unit_vec[0]unit_vec[1]unit_vec[2]=x12+y12+z12x1=x12+y12+z12y1=x12+y12+z12z1
向量夹角公式:
cos ⟨ a , b ⟩ = a ⋅ b ∣ a ∣ ∣ b ∣ \cos\langle \mathbf{a}, \mathbf{b} \rangle = \frac{\mathbf{a} \cdot \mathbf{b}}{|\mathbf{a}| |\mathbf{b}|} cos⟨a,b⟩=∣a∣∣b∣a⋅b
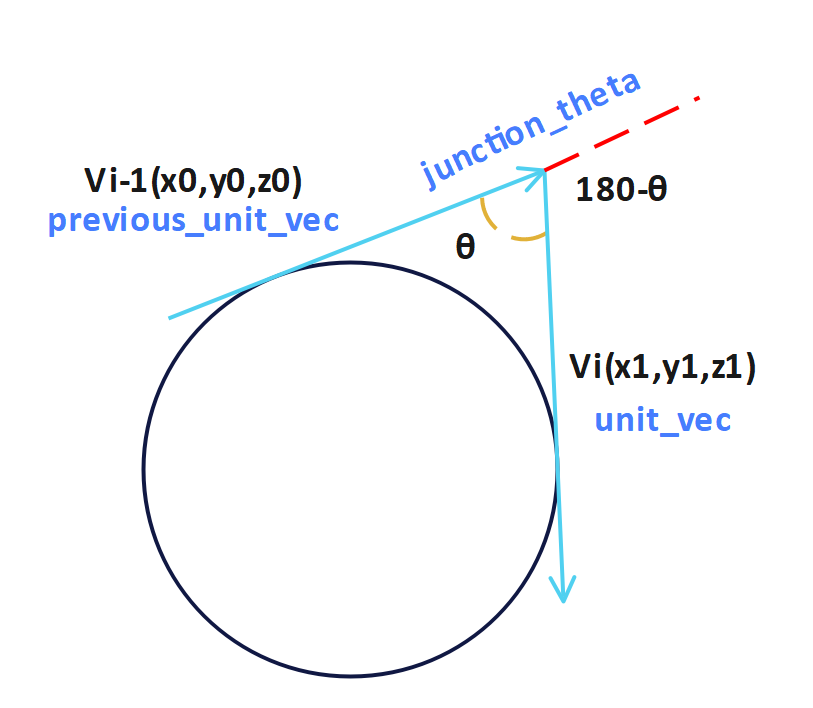
几何关系:
v i − 1 = ( x 0 , y 0 , z 0 ) v i = ( x 1 , y 1 , z 1 ) ⟨ v i − 1 , v i ⟩ = 18 0 ∘ − θ \begin{align*} \mathbf{v}_{i-1} &= (x_0, y_0, z_0) \\ {\mathbf{v}}_i &= (x_1, y_1, z_1) \\ \langle \mathbf{{v}_{i-1}}, \mathbf{{v}_{i}} \rangle &= 180^\circ - \theta \\ \end{align*} vi−1vi⟨vi−1,vi⟩=(x0,y0,z0)=(x1,y1,z1)=180∘−θ
转角计算:
junction_cos_theta = − cos ⟨ v i − 1 , v i ⟩ = − x 0 x 1 + y 0 y 1 + z 0 z 1 x 0 2 + y 0 2 + z 0 2 ⋅ x 1 2 + y 1 2 + z 1 2 = − ( previous_unit_vec ⋅ unit_vec ) \begin{align*} \text{junction\_cos\_theta} &= -\cos\langle \mathbf{v}_{i-1}, {\mathbf{v}}_i \rangle \\ &= - \frac{x_0 x_1 + y_0 y_1 + z_0 z_1}{\sqrt{x_0^2 + y_0^2 + z_0^2} \cdot \sqrt{x_1^2 + y_1^2 + z_1^2}} \\ &= -(\text{previous\_unit\_vec} \cdot \text{unit\_vec}) \end{align*} junction_cos_theta=−cos⟨vi−1,vi⟩=−x02+y02+z02⋅x12+y12+z12x0x1+y0y1+z0z1=−(previous_unit_vec⋅unit_vec)
7 .最大转角速度计算
if (block_buffer_head == block_buffer_tail) {
// 缓冲区为空时的初始化(从静止开始运动)
block->entry_speed_sqr = 0.0; // 入口速度平方为0
block->max_junction_speed_sqr = 0.0; // 最大转角速度平方为0
} else {
// 检查转角是否接近直线(cosθ≈1)
if (junction_cos_theta > 0.999999) {
// 接近直线运动,使用最小转角速度
block->max_junction_speed_sqr = MINIMUM_JUNCTION_SPEED*MINIMUM_JUNCTION_SPEED;
} else {
// 避免数值问题导致除零
junction_cos_theta = max(junction_cos_theta,-0.999999);
// 使用半角公式计算sin(θ/2) = √[0.5(1-cosθ)]
float sin_theta_d2 = sqrt(0.5*(1.0-junction_cos_theta));
// 基于向心加速度计算最大转角速度
// 公式:v_max² = max(v_min², (a×d×sin(θ/2))/(1-sin(θ/2)))
// 其中:a=加速度,d=转角偏差参数
block->max_junction_speed_sqr = max(
MINIMUM_JUNCTION_SPEED*MINIMUM_JUNCTION_SPEED,
(block->acceleration * settings.junction_deviation * sin_theta_d2)/
(1.0-sin_theta_d2)
);
}
}
由二倍角公式:
cos θ = 2 cos 2 θ 2 − 1 = 1 − 2 sin 2 θ 2 \cos\theta = 2\cos^2\frac{\theta}{2} - 1 = 1 - 2\sin^2\frac{\theta}{2} cosθ=2cos22θ−1=1−2sin22θ
可得半角正弦公式:
sin θ 2 = 1 − cos θ 2 \sin\frac{\theta}{2} = \sqrt{\frac{1 - \cos\theta}{2}} sin2θ=21−cosθ
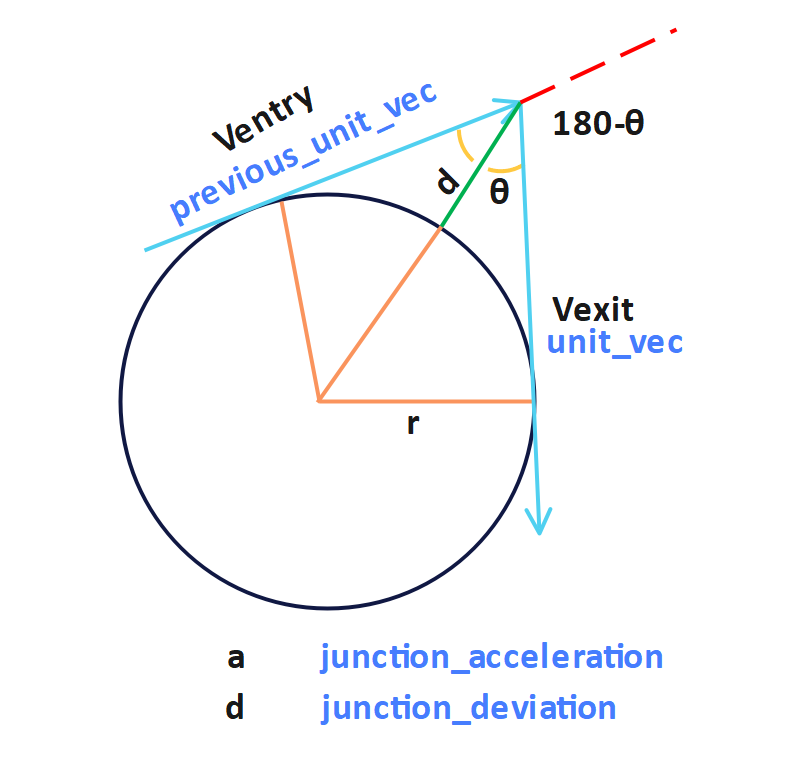
由几何关系:
sin θ 2 = r r + d \sin\frac{\theta}{2} = \frac{r}{r + d} sin2θ=r+dr
可得半径 r :
r = d ⋅ sin θ 2 1 − sin θ 2 r = \frac{d \cdot \sin\frac{\theta}{2}}{1 - \sin\frac{\theta}{2}} r=1−sin2θd⋅sin2θ
速度平方计算:
v 2 = a ⋅ r = a ⋅ d ⋅ sin θ 2 1 − sin θ 2 v^2 = a \cdot r = a\cdot d \cdot \frac{\sin\frac{\theta}{2}}{1 - \sin\frac{\theta}{2}} v2=a⋅r=a⋅d⋅1−sin2θsin2θ
最大连接速度:
max_junction_speed_sqr = max ( MINIMUM_JUNCTION_SPEED 2 , v 2 ) \text{max\_junction\_speed\_sqr} = \max\left(\text{MINIMUM\_JUNCTION\_SPEED}^2, v^2\right) max_junction_speed_sqr=max(MINIMUM_JUNCTION_SPEED2,v2)
8 .运动参数存储
// 存储标称速度平方(用于后续规划)
block->nominal_speed_sqr = feed_rate * feed_rate;
// 计算最大入口速度(取转角速度、当前速度和前一个速度的最小值)
block->max_entry_speed_sqr = min(
block->max_junction_speed_sqr,
min(block->nominal_speed_sqr, pl.previous_nominal_speed_sqr)
);
// 更新前一路径信息(供下一条路径使用)
memcpy(pl.previous_unit_vec, unit_vec, sizeof(unit_vec)); // 保存当前单位向量
pl.previous_nominal_speed_sqr = block->nominal_speed_sqr; // 保存当前标称速度平方
存储标称速度平方;计算最大入口速度平方:取转角速度、当前标称速度和前一标称速度三者中的最小值
更新前一路径信息;复制当前单位向量到pl.previous_unit_vec;存储当前标称速度平方;
9 .系统状态更新
// 更新规划器位置(记录目标位置的步数)
memcpy(pl.position, target_steps, sizeof(target_steps));
// 更新缓冲区索引
block_buffer_head = next_buffer_head; // 移动头指针到下一个位置
next_buffer_head = plan_next_block_index(block_buffer_head); // 计算下下个位置
// 调用规划器重新计算速度曲线等参数
planner_recalculate();
更新缓冲区索引;block_buffer_head指向下一个缓冲区位置;调用planner_recalculate()重新计算规划;
三.GRBL速度前瞻运动规划
1 .运动规划初始化
// 从缓冲区最后一个块开始反向计算(注意是环形缓冲区)
uint8_t block_index = plan_prev_block_index(block_buffer_head);
// 如果只有一个可规划块,直接返回(至少需要2个块才能规划)
if (block_index == block_buffer_planned) {
return;
}
planner_recalculate()函数主要重新计算缓冲区中所有运动块的速度曲线(加速度/减速度),采用"反向规划-正向规划"双通道计算策略,确保运动平滑。
关键变量:
block_buffer_planned: 指向已规划完成的最后一个块
block_buffer_head: 指向最新添加的块
block_buffer_tail: 指向正在执行的块
2 .反向规划
/* 从最后一个块开始反向计算最大允许入口速度 */
float entry_speed_sqr; // 临时存储入口速度平方值
plan_block_t *next; // 指向下一个块(反向计算时指向前一个块)
plan_block_t *current = &block_buffer[block_index]; // 当前处理块
/* 1 计算最后一个块的最大入口速度(出口速度为0)
* 公式:v_entry² = min(v_max_entry², 2*a*s) */
current->entry_speed_sqr = min(current->max_entry_speed_sqr,
2*current->acceleration*current->millimeters);
/* 2 处理缓冲区中只有两个块的情况 */
block_index = plan_prev_block_index(block_index);
if (block_index == block_buffer_planned) {
// 如果第一个块是尾块(正在执行的块),更新参数
if (block_index == block_buffer_tail) {
st_update_plan_block_parameters();
}
}
/* 3 处理三个及以上块的情况 */
else {
while (block_index != block_buffer_planned) {
next = current;
current = &block_buffer[block_index];
block_index = plan_prev_block_index(block_index);
// 如果下一个块是尾块,更新参数
if (block_index == block_buffer_tail) {
st_update_plan_block_parameters();
}
/* 4 计算当前块的最大入口速度
* 公式:v_entry² = v_exit² + 2*a*s */
if (current->entry_speed_sqr != current->max_entry_speed_sqr) {
entry_speed_sqr = next->entry_speed_sqr + 2*current->acceleration*current->millimeters;
// 限制不超过最大允许入口速度
if (entry_speed_sqr < current->max_entry_speed_sqr) {
current->entry_speed_sqr = entry_speed_sqr;
} else {
current->entry_speed_sqr = current->max_entry_speed_sqr;
}
}
}
}
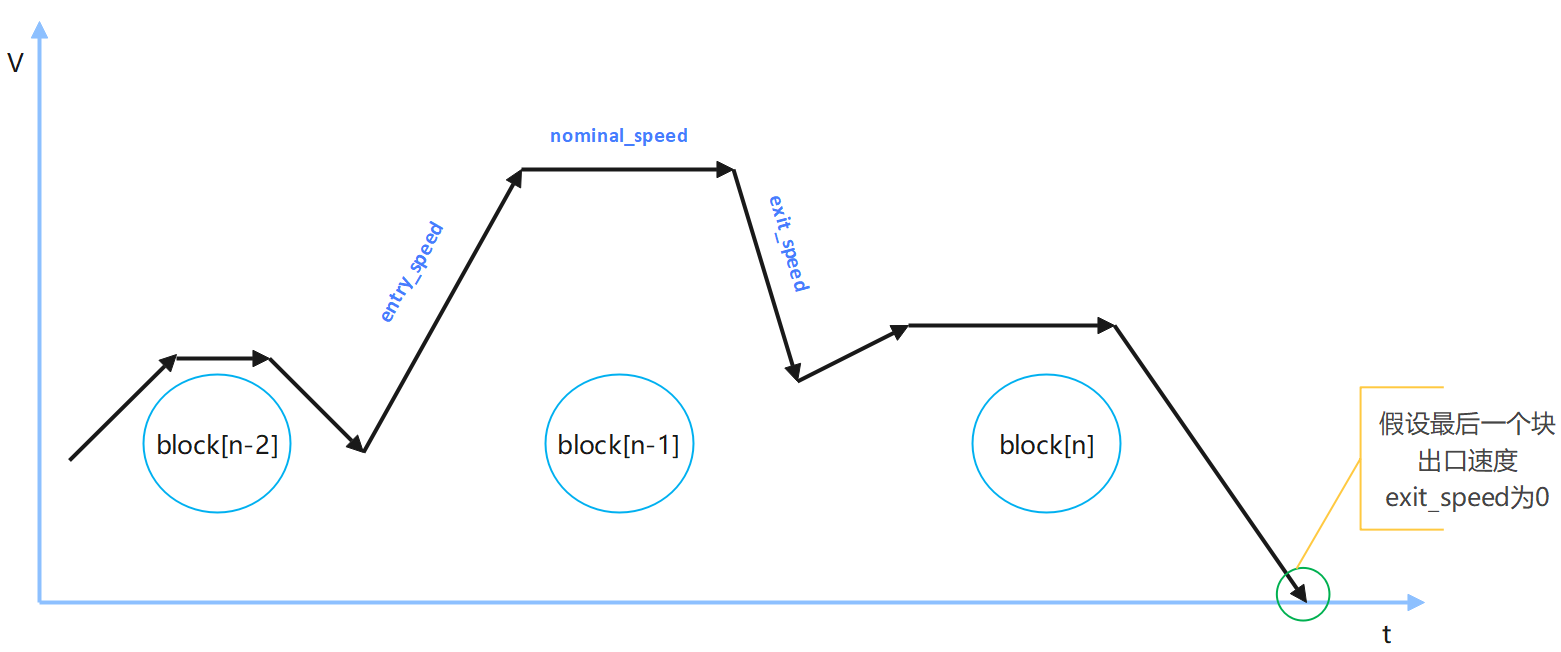
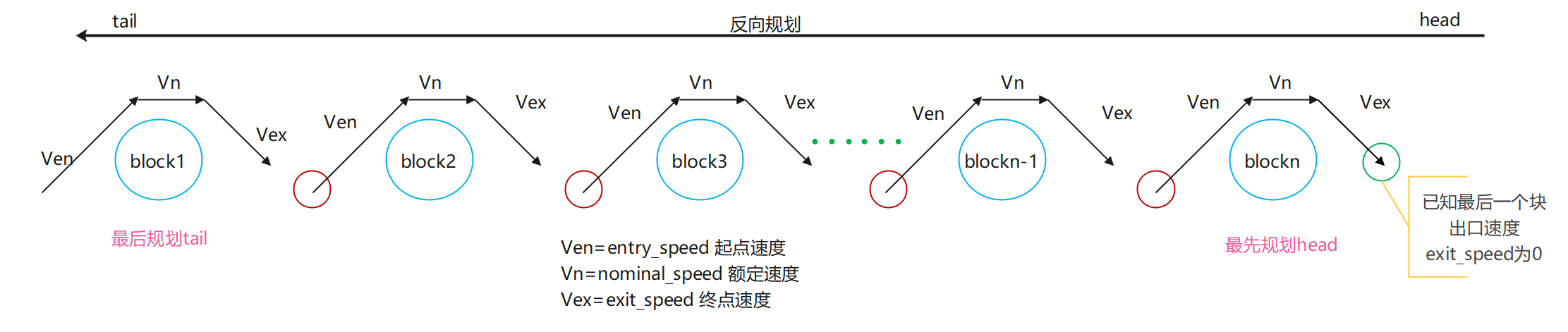
假设最后一个块的出口速度 exit_speed初始化为 0(因为运动最终要停止);已知块加速度 a 和块运动距离 S,往前反推,计算各个块 entry_speed;
计算前一个块的最大允许入口速度公式:
v e n t r y 2 = m i n ( v m a x _ e n t r y 2 , v e x i t 2 + 2 ∗ a ∗ S ) v_{entry}^2 = min(v_{max\_entry}^2, v_{exit}^2 + 2*a*S) ventry2=min(vmax_entry2,vexit2+2∗a∗S)
反向规划前瞻过程图:
3 .正向规划
/* 从已规划块开始正向计算,优化加速度曲线 */
next = &block_buffer[block_buffer_planned]; // 从已规划指针开始
block_index = plan_next_block_index(block_buffer_planned);
while (block_index != block_buffer_head) {
current = next;
next = &block_buffer[block_index];
/* 1 检查当前块是否可以加速 */
if (current->entry_speed_sqr < next->entry_speed_sqr) {
// 计算可能的出口速度:v_exit² = v_entry² + 2*a*s
entry_speed_sqr = current->entry_speed_sqr + 2*current->acceleration*current->millimeters;
/* 2 如果计算出的速度小于下一个块的当前入口速度 */
if (entry_speed_sqr < next->entry_speed_sqr) {
next->entry_speed_sqr = entry_speed_sqr; // 更新入口速度
block_buffer_planned = block_index; // 移动最优规划指针
}
}
/* 3 优化策略:当块以最大速度运行时提前终止计算 */
if (next->entry_speed_sqr == next->max_entry_speed_sqr) {
block_buffer_planned = block_index;
}
block_index = plan_next_block_index(block_index);
}
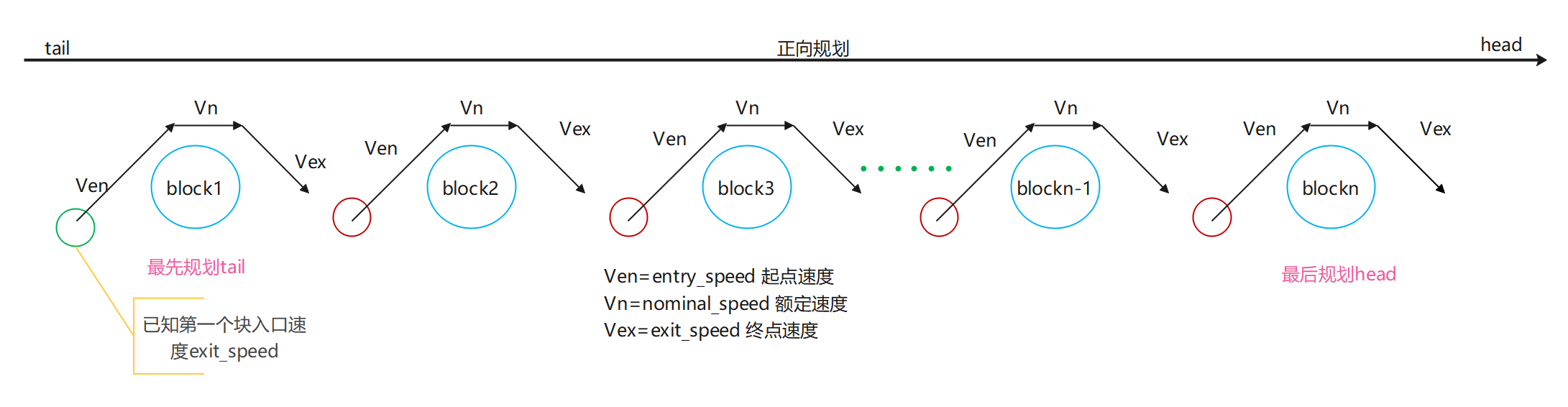
已知入口速度 entry_speed,检查当前块是否可以加速到下一个块的入口速度;如果可以,已知块加速度 a 和块运动距离 S,往后反推,计算各个块出口速度 exit_speed;如果计算出的出口速度 exit_speed小于下一个块的当前入口速度,则更新速度;
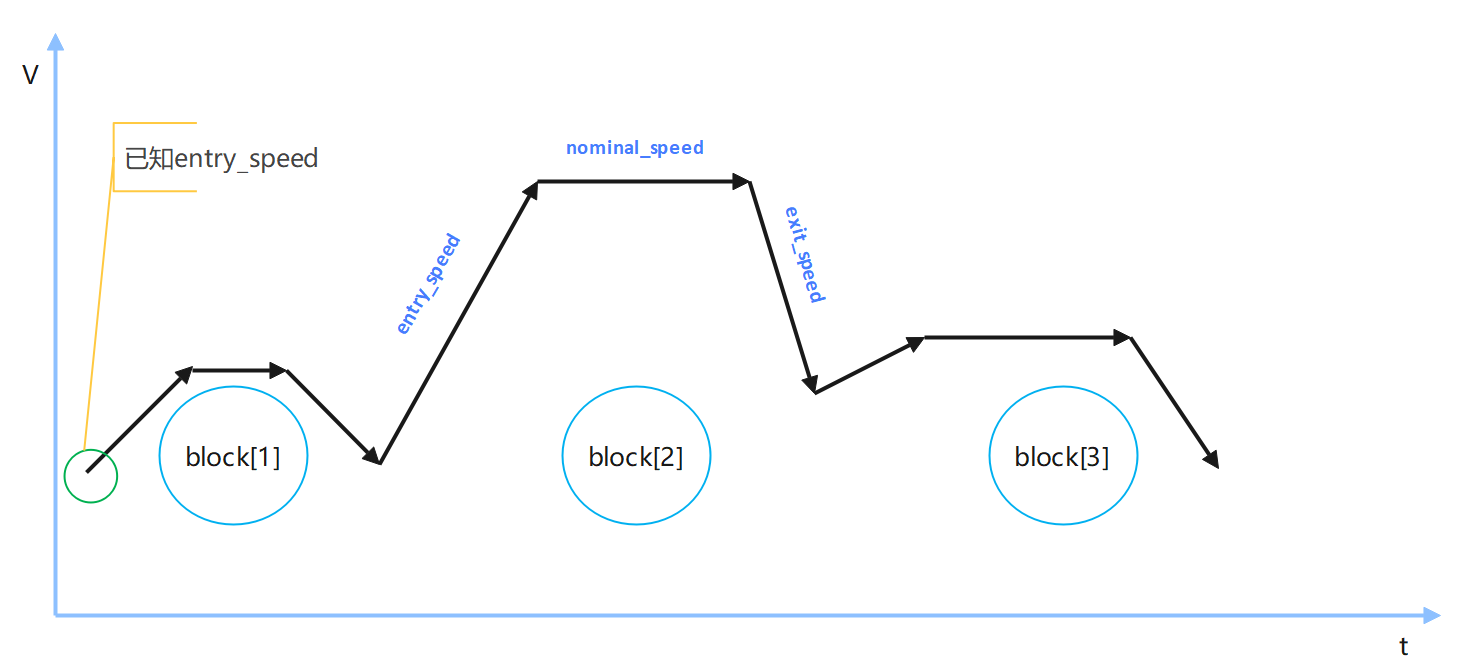
计算当前块的最大允许出口速度公式:
v e x i t 2 = v e n t r y 2 + 2 ∗ a ∗ S v_{exit}^2 = v_{entry}^2 + 2*a*S vexit2=ventry2+2∗a∗S
正向规划前瞻过程图:
四.反向规划与正向规划分析
1 .运动规划举例
设有 4 个块,初始参数如下表
| 块号 | 距离 S(mm) | 加速度 a(mm/s²) | 速度 v_max_entry(mm/s²) |
|---|---|---|---|
| 1 | 5 | 200 | 80 |
| 2 | 10 | 200 | 60 |
| 3 | 20 | 200 | 100 |
| 4 | 15 | 200 | 80 |
2 .反向规划(Backward Pass)
块 4 计算(最后一块,出口速度必须为0):
v 4 , e n t r y = m i n ( 80 , 0 + 2 × 200 × 15 ) = m i n ( 80 , 77.46 ) = 77.46 m m / s v_{4,entry} = min(80,\ \sqrt{0 + 2×200×15}) = min(80, 77.46) = 77.46\ mm/s v4,entry=min(80, 0+2×200×15)=min(80,77.46)=77.46 mm/s
块 3 计算(基于块 4 的入口速度):
v 3 , e n t r y = m i n ( 100 , 77.4 6 2 + 2 × 200 × 20 ) = m i n ( 100 , 118.32 ) = 100 m m / s v_{3,entry} = min(100,\ \sqrt{77.46^2 + 2×200×20}) = min(100, 118.32) = 100\ mm/s v3,entry=min(100, 77.462+2×200×20)=min(100,118.32)=100 mm/s
块 2 计算(基于块 3 的入口速度):
v 2 , e n t r y = m i n ( 60 , 10 0 2 + 2 × 200 × 10 ) = m i n ( 60 , 118.32 ) = 60 m m / s v_{2,entry} = min(60,\ \sqrt{100^2 + 2×200×10}) = min(60, 118.32) = 60\ mm/s v2,entry=min(60, 1002+2×200×10)=min(60,118.32)=60 mm/s
块 1 计算(基于块 2 的入口速度):
v 1 , e n t r y = m i n ( 80 , 6 0 2 + 2 × 200 × 5 ) = m i n ( 80 , 74.83 ) = 74.83 m m / s v_{1,entry} = min(80,\ \sqrt{60^2 + 2×200×5}) = min(80, 74.83) = 74.83\ mm/s v1,entry=min(80, 602+2×200×5)=min(80,74.83)=74.83 mm/s
反向规划结果:
块1:74.83 → 60
块2:60 → 100
块3:100 → 77.46
块4:77.46 → 0
3 .正向规划(Forward Pass)
计算块 1 的实际出口速度:
判断 74.8 3 2 < 6 0 2 74.83^2 < 60^2 74.832<602
条件不成立!不执行任何操作;正向计算不会修改块 2 的入口速度,块 2 的入口速度 60
计算块 2 的实际出口速度:
v 1 , e x i t = 6 0 2 + 2 × 200 × 10 = 87.2 m m / s v_{1,exit} = \sqrt{60^2 + 2×200×10} = 87.2\ mm/s v1,exit=602+2×200×10=87.2 mm/s
块 1 的当前出口速度87.2 < 块2的当前入口速度100;需要调整块 3 入口速度从100降为87.2
计算块 3 的实际出口速度:
判断 87. 2 2 < 77.4 6 2 87.2^2 < 77.46^2 87.22<77.462
条件不成立!不执行任何操作;正向计算不会修改块 4 的入口速度,块 4 的入口速度 77.46
正向规划结果:
块1:74.83 → 60
块2:60 → 87.2
块3:87.2 → 77.46
块4:77.46 → 0
4 .总结
反向规划:确保所有块的减速能力(出口→入口)
正向规划:优化加速能力(入口→出口)
{ v i , e n t r y ≤ v i + 1 , e x i t 2 + 2 a i S i (反向保证减速可行) v i , e x i t ≤ v i , e n t r y 2 + 2 a i S i (正向优化加速能力) \begin{cases} v_{i,entry} \leq \sqrt{v_{i+1,exit}^2 + 2a_iS_i} & \text{(反向保证减速可行)} \\ v_{i,exit} \leq \sqrt{v_{i,entry}^2 + 2a_iS_i} & \text{(正向优化加速能力)} \end{cases} ⎩ ⎨ ⎧vi,entry≤vi+1,exit2+2aiSivi,exit≤vi,entry2+2aiSi(反向保证减速可行)(正向优化加速能力)
很多人误以为正向计算会全面重新计算所有速度,实际上它只做单方向的加速优化。
反向规划是"安全基线",正向规划是"性能优化"。


















 6799
6799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









