



 本文介绍了感知机通过暴力方法寻找合适参数,实现二分类任务的过程。包括如何判断分类的正误,以及如何调整参数纠正错误分类。
本文介绍了感知机通过暴力方法寻找合适参数,实现二分类任务的过程。包括如何判断分类的正误,以及如何调整参数纠正错误分类。
下面是机器学习的《监督式学习》课程的一篇试读文章,进行了一下重新排版,然后展示在这里。由于格式的限制,缺少了一些习题、可运行的代码、证明、注释等,可能会导致解释差强人意,所以介意的同学可以直接访问感知机的暴力实现,以获得最佳的阅读体验。
1 寻找合适的![]() 和
和![]()
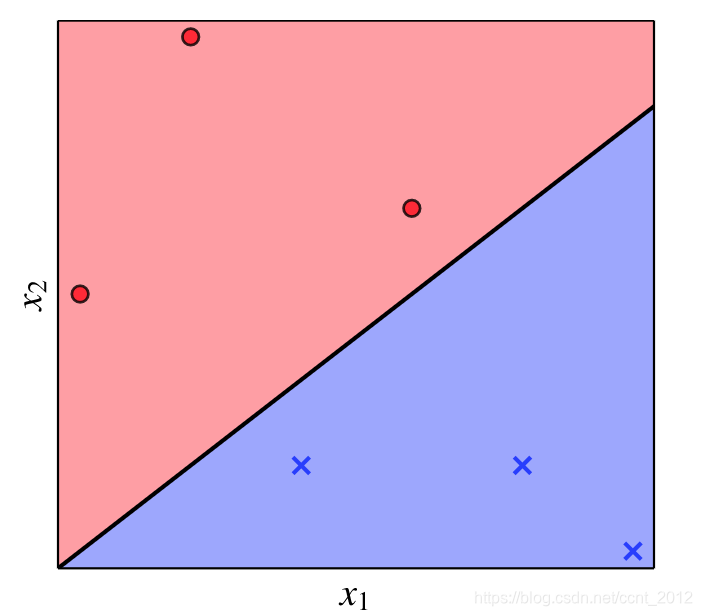
简单来说,感知机就是要找到一条直线(或者说超平面),将两类点分开(下图中的![]() 为横坐标,
为横坐标,![]() 为纵坐标):
为纵坐标):
我们知道,直线(或者超平面)的方程为(下面的![]() ):
):
![]()
本文就来介绍感知机如何通过一种看似暴力的方法来寻找合适的![]() 和
和![]() ,从而找到将两类点分开的直线(或者超平面)。
,从而找到将两类点分开的直线(或者超平面)。
2 前置结论
首先我们要知道一些前置的结论,下面一一来介绍。
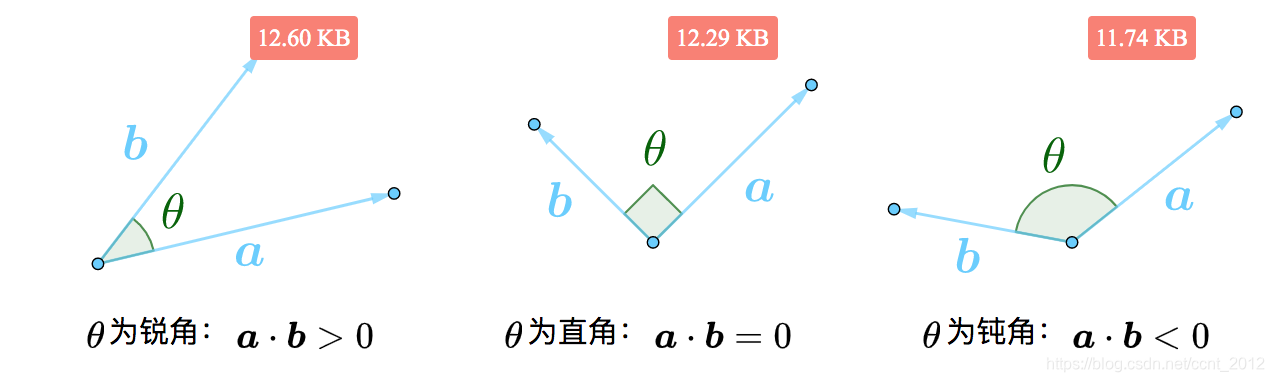
2.1 点积的正负与夹角的大小
根据点积的知识,可以知道点积的正负与夹角的大小如下:
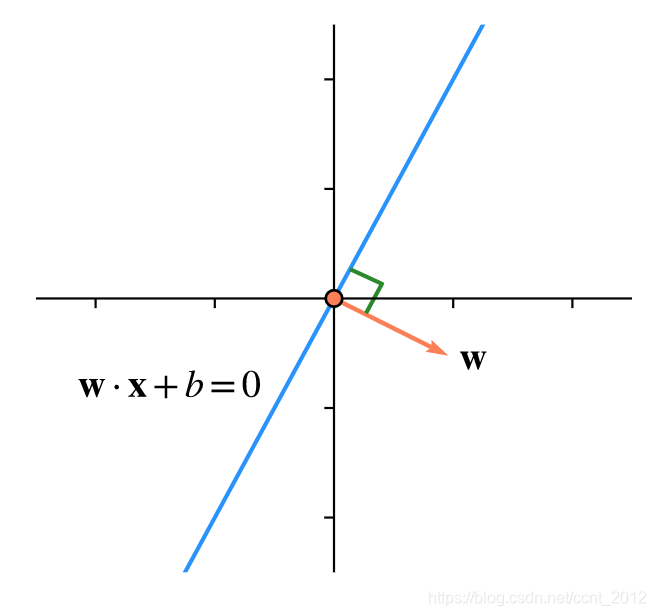
2.2 法向量
对于n维空间中的超平面![]() 而言,
而言,![]() 总是其法向量,即:
总是其法向量,即:
![]()
比如二维空间中,![]() 是一条直线,
是一条直线,![]() 就垂直于该直线:
就垂直于该直线:
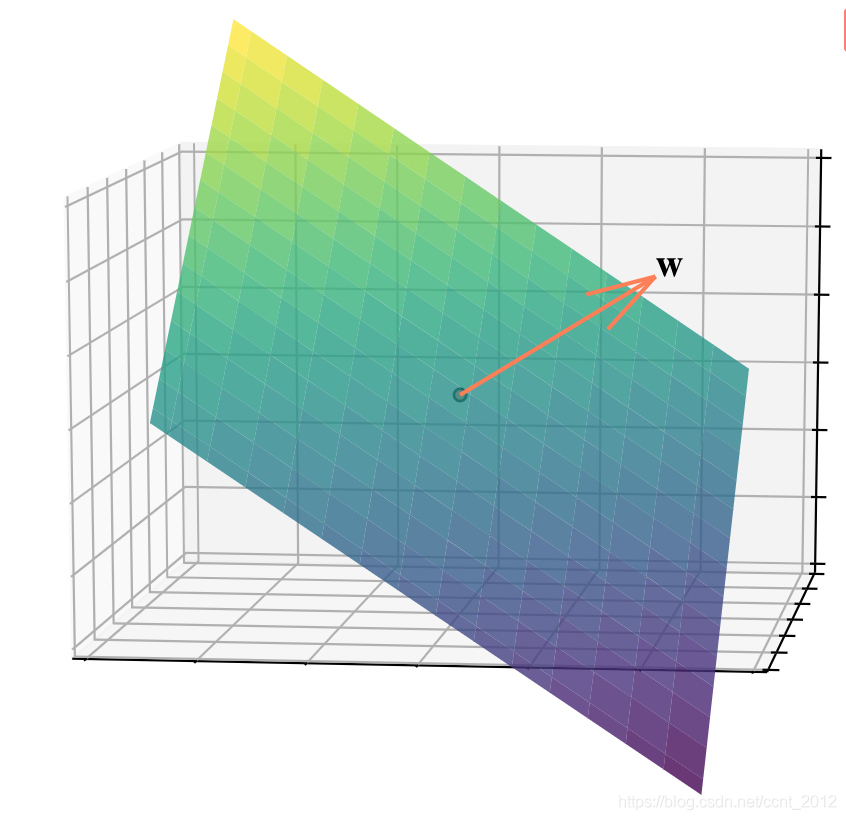
同样的道理,在三维空间中![]() 是一个平面,
是一个平面,![]() 是该平面的法向量:
是该平面的法向量:
2.3 超平面的两侧
-
 :在超平面的法向量
:在超平面的法向量 所指的一侧
所指的一侧 -
 :在超平面上
:在超平面上 -
 :在超平面的法向量所指的另外一侧
:在超平面的法向量所指的另外一侧
比如二维空间中的直线![]() 周围有三个向量:
周围有三个向量:
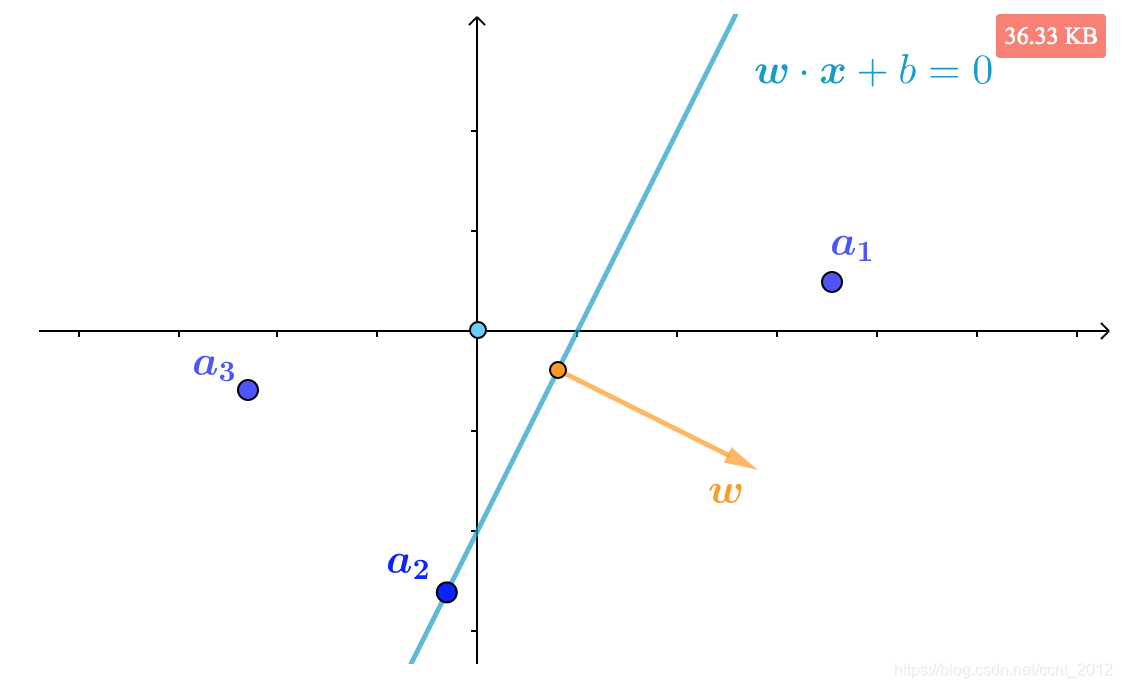
根据上述结论可得:
-
 :在直线的法向量
:在直线的法向量 所指的一侧
所指的一侧 -
 :在直线上
:在直线上 -
 :在直线的法向量
:在直线的法向量 所指的另外一侧
所指的另外一侧
三维空间也是一样的,假设平面![]() 周围有两个向量:
周围有两个向量:
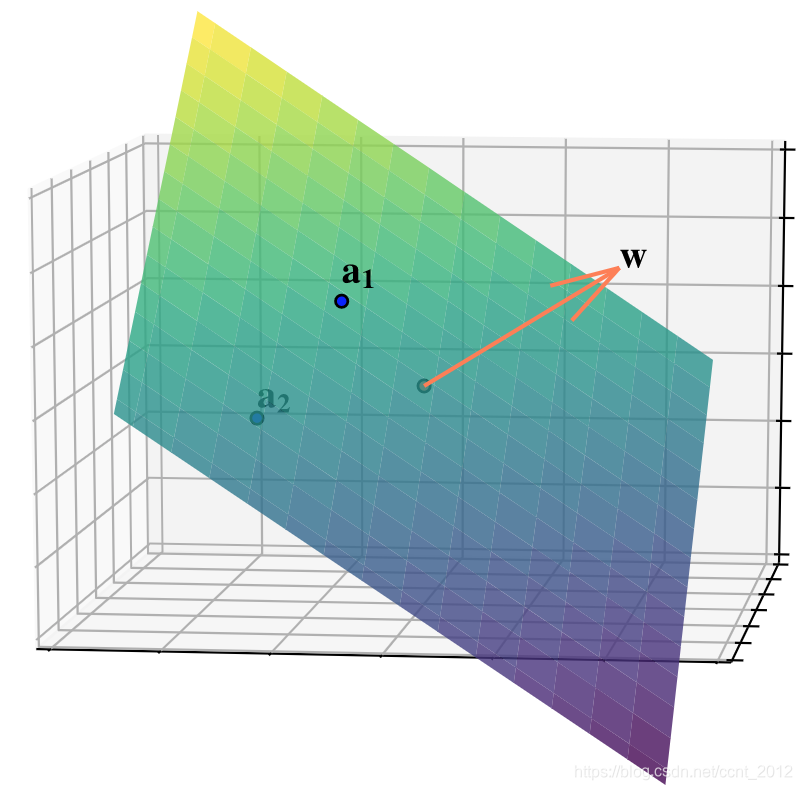
根据上述结论可得:
-
 :在平面的法向量
:在平面的法向量 所指的一侧
所指的一侧 -
 :在平面的法向量
:在平面的法向量 所指的另外一侧
所指的另外一侧
3 对错的判断
讲了这么多前置,下面开始介绍感知机的暴力实现。第一个问题是,要能判断找到的超平面![]() 的对错。
的对错。
3.1 随便找的直线
下面是用来作例子的数据集,其中![]() 为某点的作用,对应的y表示该点的类别:
为某点的作用,对应的y表示该点的类别:
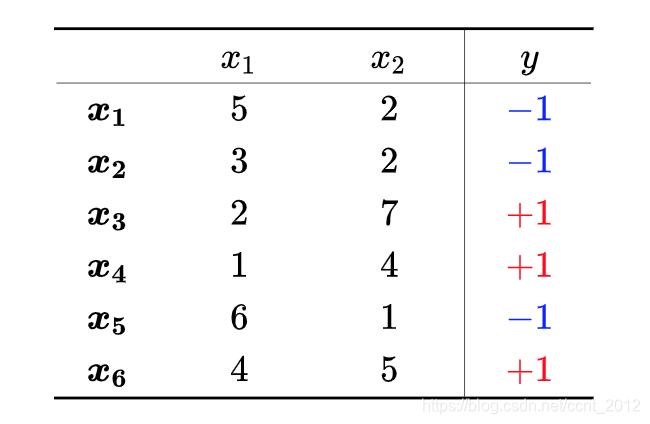

3.2 ![]() 是否分对
是否分对
下面来判断该直线的对错。我们希望标签![]() 的特征向量在直线
的特征向量在直线![]() 法向量
法向量![]() 所指的一侧,而
所指的一侧,而![]() 的特征向量在法向量
的特征向量在法向量![]() 所指的另一侧。据此,上图中分对的点为
所指的另一侧。据此,上图中分对的点为![]() 、
、![]() 、
、![]() 、
、![]() ,根据上面“超平面的两侧”的介绍,可知它们是有共同特征的:
,根据上面“超平面的两侧”的介绍,可知它们是有共同特征的:
![]()
同理,分错的点![]() 、
、![]() 也是有共同特征的(分错边或者分到了边界线上都算错):
也是有共同特征的(分错边或者分到了边界线上都算错):
![]()
3.3 小结
综上,判断![]() 对错的标准就是:
对错的标准就是:
-
分对:
-
分错:
如果所有的![]() 都分对了,那么就说明
都分对了,那么就说明![]() 是正确的超平面。
是正确的超平面。
4 错误的纠正
前面看到![]() 、
、![]() 分错了,所以超平面
分错了,所以超平面![]() 是错误的,需要纠正。本节用两个二维空间中例子来说明纠错的思路,当然这些推论也是适用于n维空间的。
是错误的,需要纠正。本节用两个二维空间中例子来说明纠错的思路,当然这些推论也是适用于n维空间的。
4.1 拉近
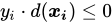
比如下面是标签![]() 的
的![]() ,它被错分到了直线
,它被错分到了直线![]() 的法向量
的法向量![]() 所指另一侧,或者说本来
所指另一侧,或者说本来![]() 和
和![]() 的夹角
的夹角![]() 应该是锐角的,现在却是钝角:
应该是锐角的,现在却是钝角:
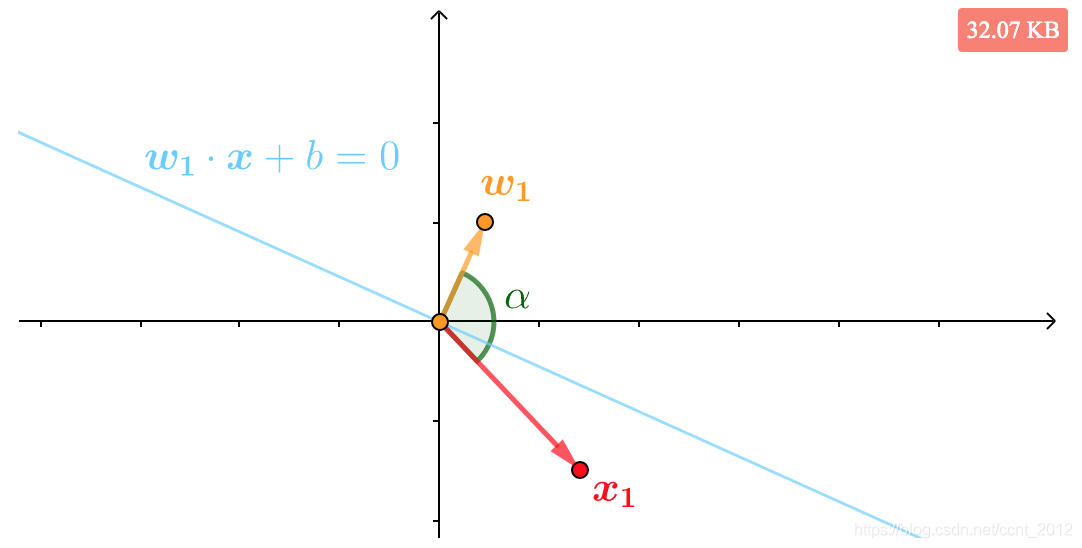
那就想办法将法向量拉近一些。根据向量加法的平行四边形法则,可以看到![]() 就是和
就是和![]() 夹角更小的向量:
夹角更小的向量:
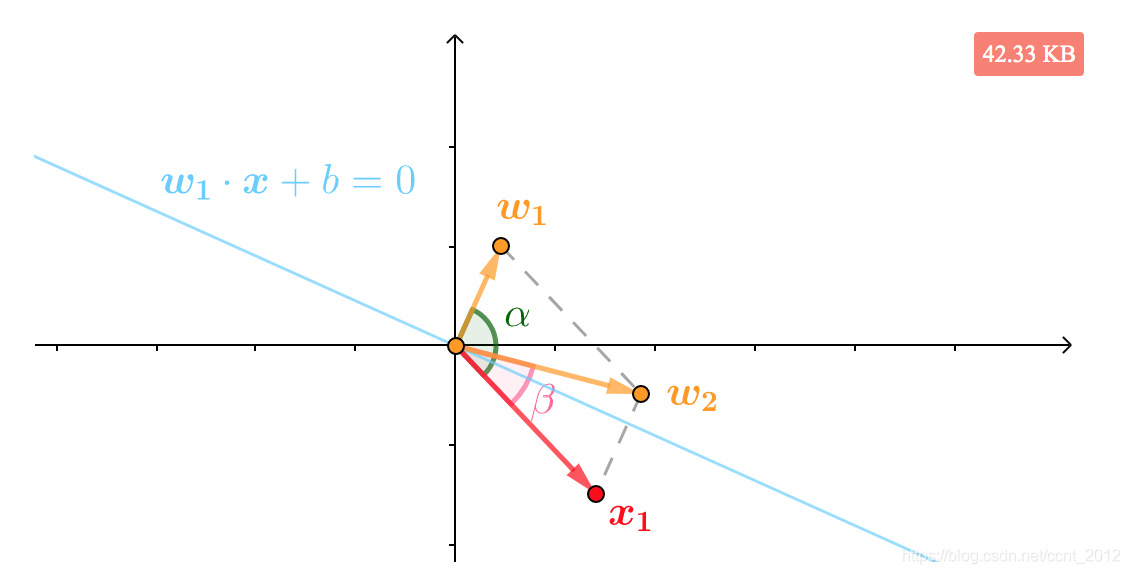
所以用![]() 为法向量,直线方程被纠正为
为法向量,直线方程被纠正为![]() ,此时就可以正确分类
,此时就可以正确分类![]() :
:
4.2 推远
而下面是标签![]() 的
的![]() 被错分了,我们希望将法向量推远一点,同样根据向量加法的平行四边形法则,可以看到
被错分了,我们希望将法向量推远一点,同样根据向量加法的平行四边形法则,可以看到![]() 就是和
就是和![]() 夹角更大的向量:
夹角更大的向量:
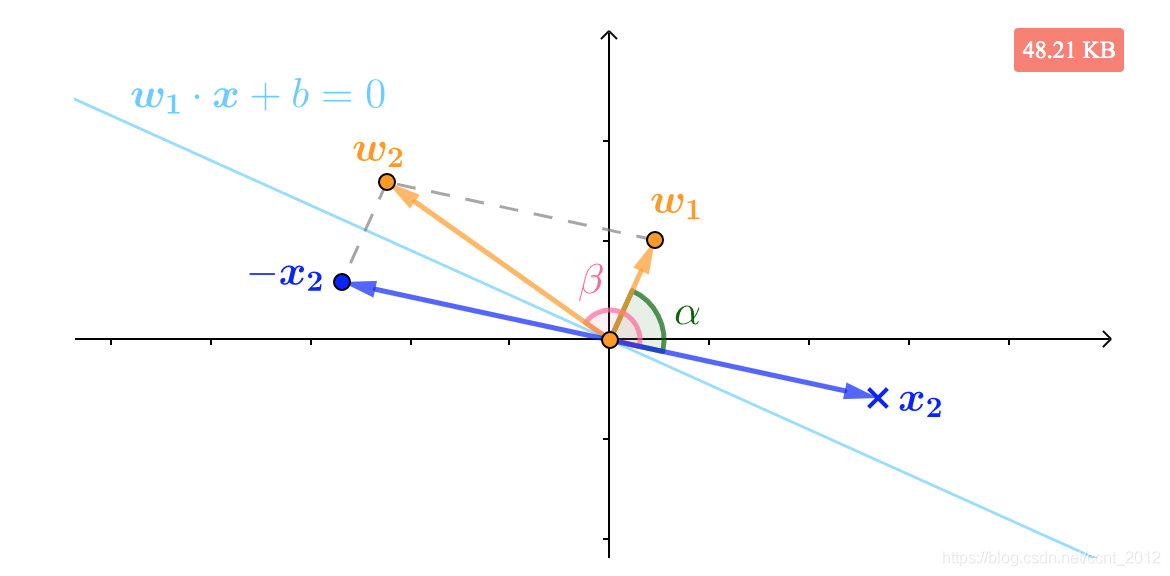
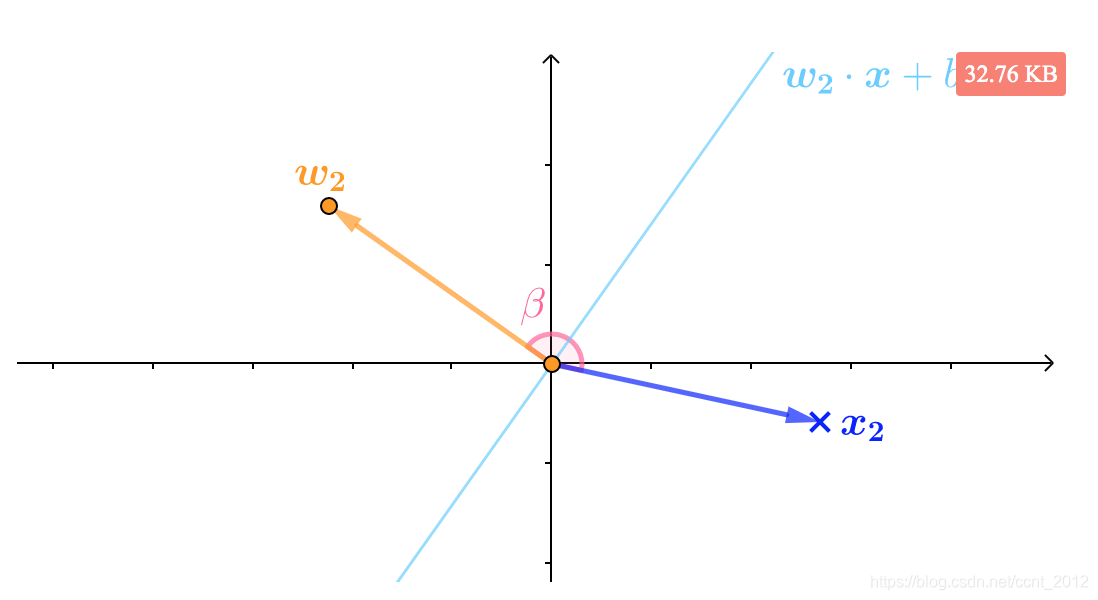
所以用![]() 为法向量,直线方程被纠正为
为法向量,直线方程被纠正为![]() ,此时就可以正确分类
,此时就可以正确分类![]() :
:
4.3 小结
总结下,当标签为![]() 的
的![]() 被错分时,也就有
被错分时,也就有
![]()
此时,只需要令![]() ,就可以得到修正后的
,就可以得到修正后的![]() :
:
![]()
下面给一个例子来进一步说明该结论。
4.4 错误纠正的例子
例 如下图所示:
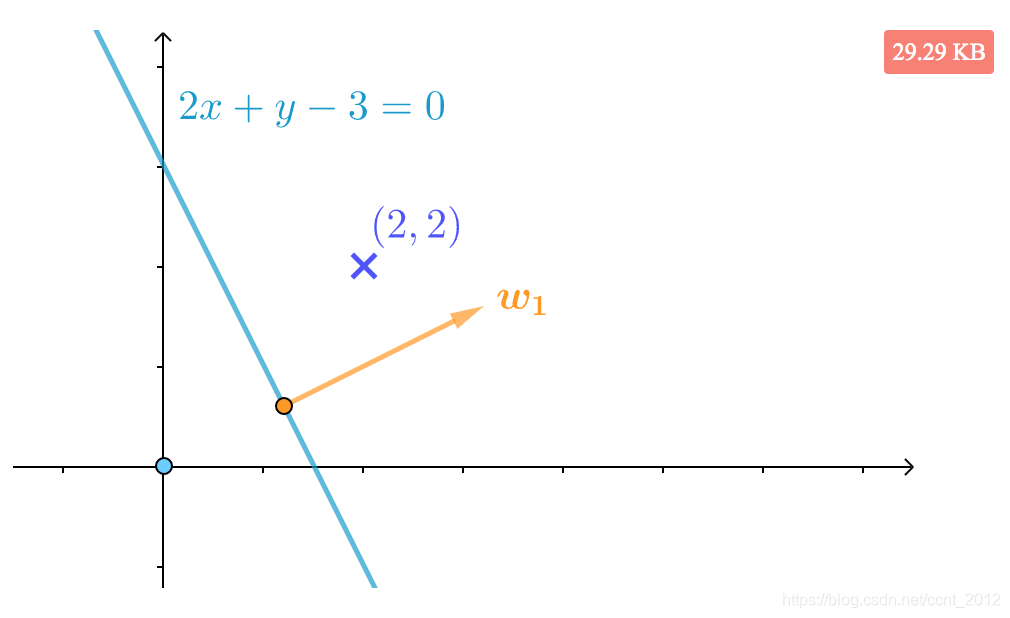
标签为![]() 的特征向量
的特征向量 分错了吗?如果分错又如何纠正?
分错了吗?如果分错又如何纠正?
解 通过看图,或者进行计算(该直线的法向量为 ),都可以发现分错了:
),都可以发现分错了:

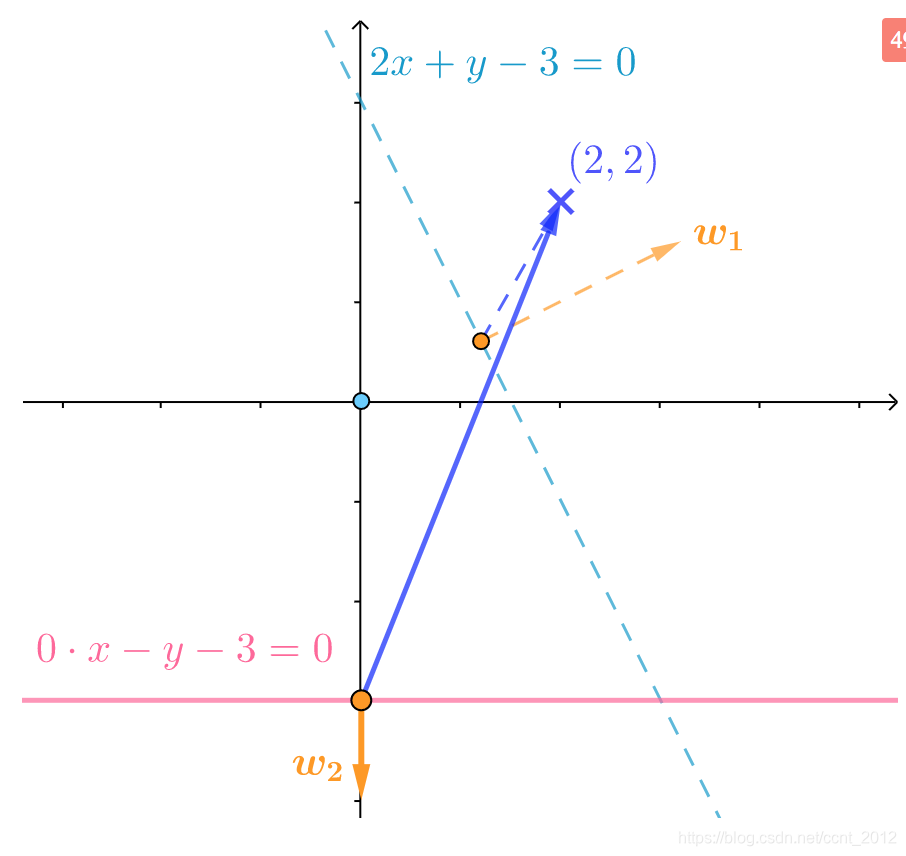
应该将法向量![]() 推远一点,修正后为:
推远一点,修正后为:

修正后的直线为![]() ,从夹角来看,修正后的法向量
,从夹角来看,修正后的法向量![]() 更远了:
更远了:
5 找到决策边界
好了,现在具备需要的知识了,让我们来为![]() 、
、![]() 纠错。按顺序来吧。
纠错。按顺序来吧。
5.1 ![]() 的纠错
的纠错
只需要令![]() 就可以得到新的超平面:
就可以得到新的超平面:
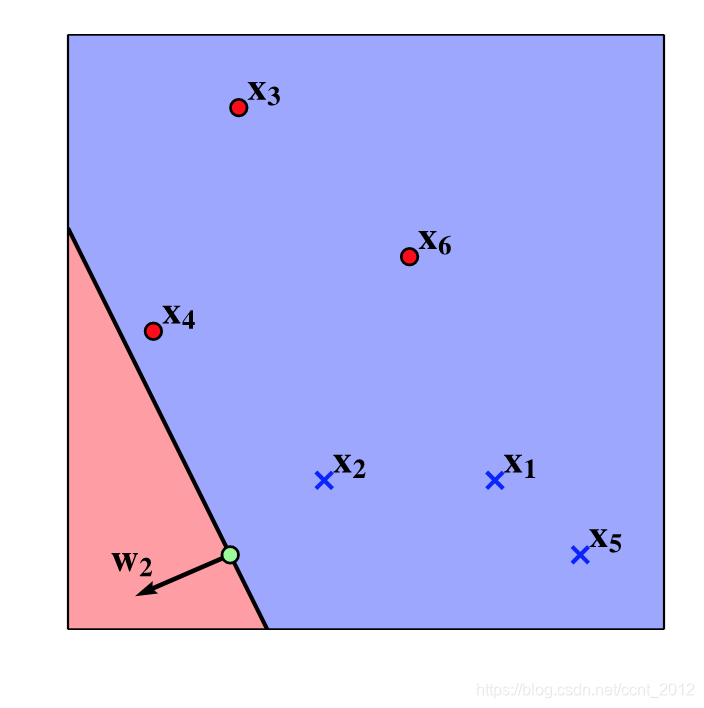
纠错后,![]() 对了。
对了。
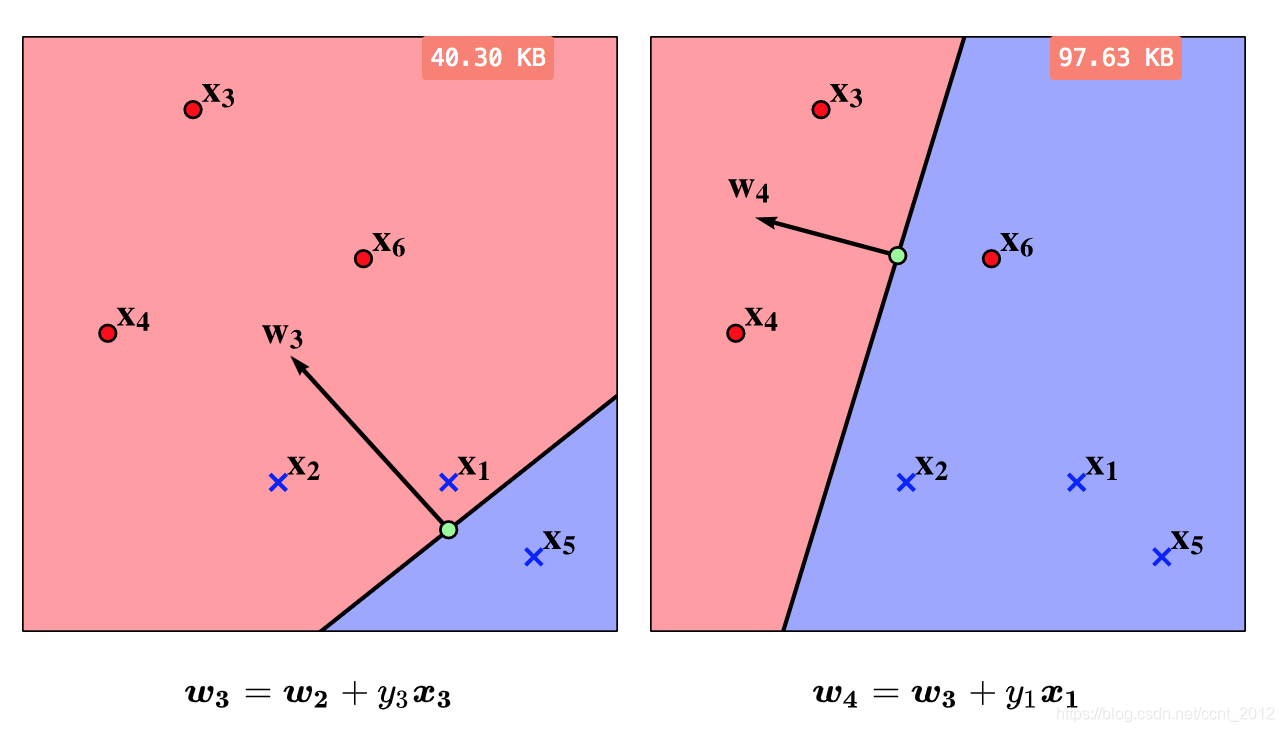
5.2 持续纠错
可是,原本没有错的![]() 却错了,令
却错了,令![]() 进行纠错;然后
进行纠错;然后![]() 又错了,继续:
又错了,继续:
5.3 找到决策边界
还有错,还得继续:
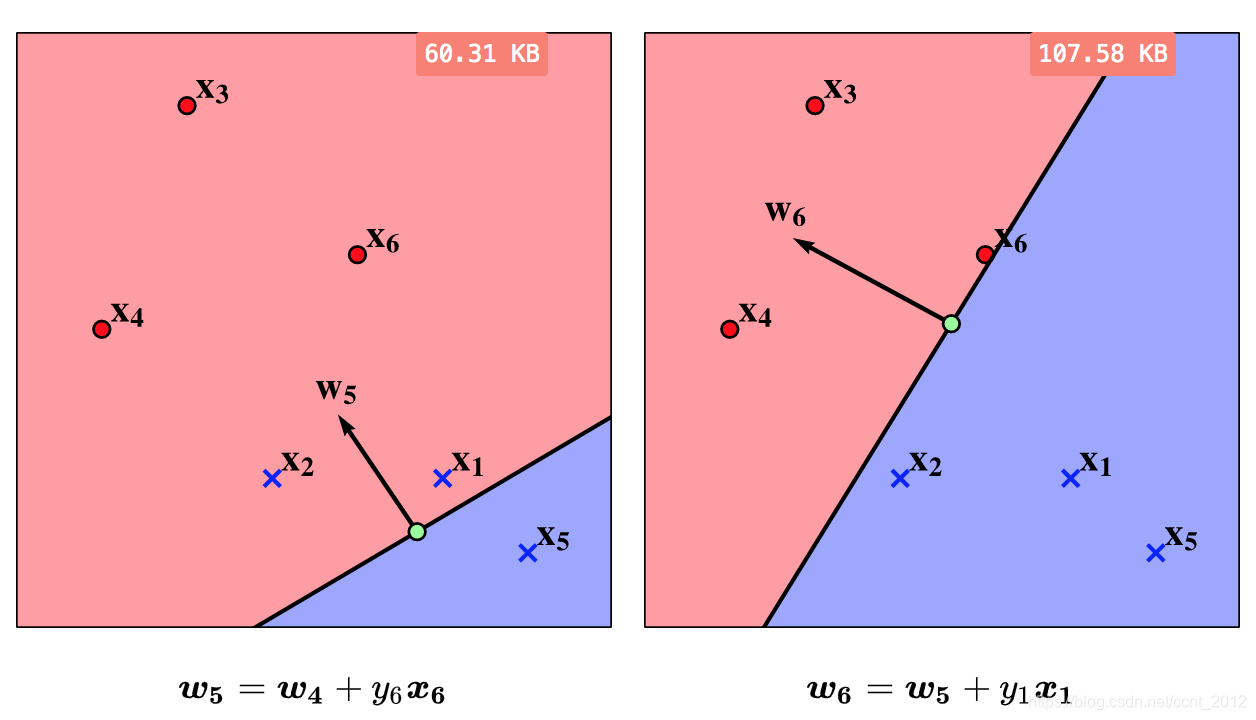
最后,法向量为![]() 的直线
的直线![]() 将所有的点正确分开,这就是感知机的暴力实现所要寻找的决策边界。
将所有的点正确分开,这就是感知机的暴力实现所要寻找的决策边界。
6 算法规范化
刚才介绍的算法一开始随机找了个超平面,实在太暴力了,下面来规范一下:
(1)令权重向量![]() 和
和![]() 都为0:
都为0:
![]()
所以初始函数为:
![]()
(2)顺序遍历数据集,从中得到![]() 。
。
(3)如果分错了,即 ![]()
则进行更正(因为刚开始![]() ,不更正
,不更正![]() 的话,超平面的截距就一直是0,导致的后果是有可能不能将数据分开):
的话,超平面的截距就一直是0,导致的后果是有可能不能将数据分开):
![]()
(4)转至(2),直到找到合适的![]() 和
和![]() ,使得
,使得![]() 对于所有的
对于所有的![]() 都满足:
都满足:
![]()
此时可以说,该超平面![]() 将数据分为了两类。
将数据分为了两类。
6.1 实现
语言描述的算法可能有歧义,下面是按照上面步骤实现的代码,可以帮助同学们精确理解感知机的暴力实现:
import numpy as np
import matplotlib.pyplot as plt
from sklearn.linear_model import Perceptron
from matplotlib.colors import ListedColormap
# 初始化 w 和 b,np.array 相当于定义向量
w, b = np.array([0, 0]), 0
# 定义 d(x) 函数
def d(x):
return np.dot(w,x)+b # np.dot 是向量的点积
# 历史信用卡发行数据
# 这里的数据集不能随便修改,否则下面的暴力实现可能停不下来
X = np.array([[5,2], [3,2], [2,7], [1,4], [6,1], [4,5]])
y = np.array([-1, -1, 1, 1, -1, 1])
# 感知机的暴力实现
is_modified = True # 记录是否有分错的点
while is_modified: # 循环,直到没有分错的点
is_modified = False
# 顺序遍及数据集 X
for xi, yi in zip(X, y):
# 如果有分错的
if yi*d(xi) <= 0:
# 更新法向量 w 和 b
w, b = w + yi*xi, b + yi
is_modified = True
break
# 下面是绘制的代码,主要展示暴力实现的结果,看不懂也没有关系
def make_meshgrid(x, y, h=.02):
"""Create a mesh of points to plot in
Parameters
----------
x: data to base x-axis meshgrid on
y: data to base y-axis meshgrid on
h: stepsize for meshgrid, optional
Returns
-------
xx, yy : ndarray
"""
x_min, x_max = x.min() - 1, x.max() + 1
y_min, y_max = y.min() - 1, y.max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
return xx, yy
def plot_contours(ax, clf, xx, yy, **params):
"""Plot the decision boundaries for a classifier.
Parameters
----------
ax: matplotlib axes object
clf: a classifier
xx: meshgrid ndarray
yy: meshgrid ndarray
params: dictionary of params to pass to contourf, optional
"""
Z = clf.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
out = ax.contourf(xx, yy, Z, **params)
return out
# 训练 skrlearn 中的感知机,这里是为了借用该感知机的接口,便于绘制决策区域
clf = Perceptron().fit(X, y)
# 根据上面暴力实现得到的 w 和 b 来修改感知机
clf.coef_[0][0], clf.coef_[0][1], clf.intercept_[0] = w[0], w[1], b
# 设置字体大小
plt.rcParams.update({'font.size': 14})
# 设置画布和坐标系
fig, ax = plt.subplots(figsize = (6, 3), nrows=1, ncols=1)
fig.subplots_adjust(left=0.25, right=0.75, top=0.999, bottom=0.001)
ax.set_xticks(()),ax.set_yticks(())
cm = ListedColormap(('blue', 'red'))
markers = ('x', 'o')
# 决定绘制区域的大小
X0, X1 = X[:, 0], X[:, 1]
xx, yy = make_meshgrid(X0, X1)
ax.set_xlim(xx.min(), xx.max())
ax.set_ylim(yy.min(), yy.max())
# 绘制决策区域
plot_contours(ax, clf, xx, yy, cmap=cm, alpha=0.4)
# 绘制决策直线
lx = np.linspace(xx.min(), xx.max())
ly = - w[0] / w[1] * lx - b / w[1]
ax.plot(lx, ly, 'k-')
# 根据类别不同,绘制不同形状的点
vmin, vmax = min(y), max(y)
for cl, m in zip(np.unique(y), markers):
ax.scatter(x=X0[y==cl], y=X1[y==cl], c=y[y==cl], alpha=1, vmin = vmin, vmax = vmax, cmap=cm, edgecolors='k', marker = m)
plt.show()


















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











