




本程序面向海洋机器人声学定位应用,针对水下声学测距中普遍存在的方向相关误差与几何退化问题,开展信标空间布局的优化设计。程序以几何精度因子(GDOP)为性能评价指标,在充分考虑声学传播各向异性特性的基础上,利用遗传算法对信标位置进行全局优化,从而提升定位系统的稳定性与精度。
原创代码,请勿翻卖
背景
在实际水下环境中,声学测距精度通常随方向变化:
- 水平方向测距精度通常优于垂直方向
- 某些方位角或俯仰角下易出现定位退化
- 不合理的信标布局会导致几何矩阵病态,定位结果对噪声高度敏感
传统 GDOP 分析多采用各向同性误差假设,难以准确反映真实声学环境。本程序通过引入方向相关的误差权重,对信标布局进行针对性优化,更符合工程实际。
方法概述
程序的整体流程包括以下几个关键环节:
-
声学误差各向异性建模
根据测距方向差异,设置不同方向上的测距精度,用以描述水下声学传播的非均匀特性。 -
加权 GDOP 评价机制
在传统几何精度分析的基础上,引入方向相关权重,使 GDOP 同时反映信标几何分布和测距精度差异。 -
遗传算法全局优化
以最小化加权 GDOP 为目标,搜索满足工作空间约束的最优信标布局,并避免信标过度集中。 -
稳定性与退化分析
通过条件数、空间热力分布以及方向误差分布等方式,对优化前后的布局性能进行对比评估。
程序功能说明
-
初始布局构建
默认采用规则四面体作为基准信标构型,确保初始几何结构合理。 -
信标布局自动优化
在给定工作空间内自动搜索信标最优三维位置,输出优化前后 GDOP 指标对比。 -
空间性能可视化
- 三维信标布局对比
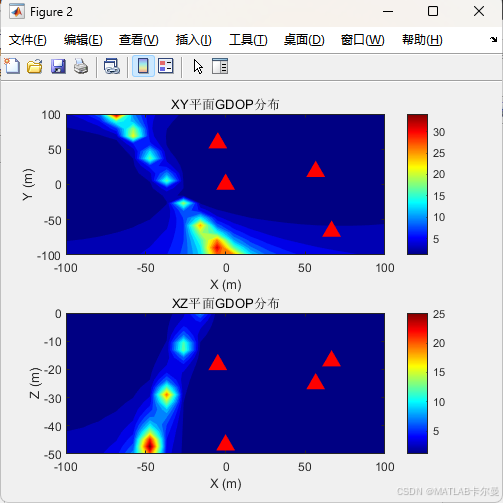
- 不同平面上的 GDOP 分布热图
- 定位几何稳定性对比柱状图
-
方向退化特性分析
以三维极坐标形式展示不同方向上的定位误差放大趋势,用于识别潜在的退化方向。
程序特点
- 可用于真实水下声学环境,引入方向相关误差建模
- 将信标几何分布与测距精度统一纳入评价体系
- 采用全局优化算法,避免局部最优解
- 分析手段全面,兼顾精度、稳定性与鲁棒性
适用场景
- 水下声学导航与定位系统设计
- 海洋机器人信标网络规划
- 水下协同导航与基准站部署研究
- 声学定位相关科研与工程仿真验证
运行结果
优化前后的GDOP分布图像:
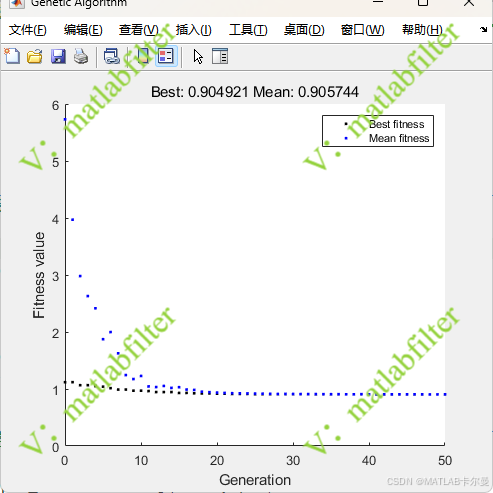
遗传算法迭代曲线:
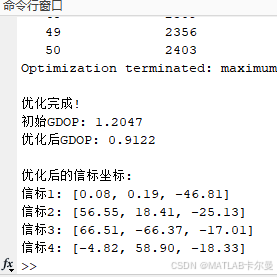
测试点的GDOP数据对比、优化后的锚点位置:
MATLAB源代码
部分代码如下:
%% 考虑声学传播的各向异性特征和测距方向退化问题,遗传算法对GDOP优化
% 考虑声学测距方向退化的信标布局设计
% 作者:matlabfilter(V同号,可接代码定制、讲解与调试)
% 2025-12-25/Ver1
clear; close all; clc;
rng(0);
%% 参数初始化
n_beacons = 4; % 信标数量
work_space = [-100 100 -100 100 -50 0]; % 工作空间 [xmin xmax ymin ymax zmin zmax]
robot_pos = [0, 0, -25]; % 机器人典型位置(米)
% 各向异性参数 - 模拟声学传播特性
% 假设水平方向测距精度优于垂直方向
sigma_horizontal = 0.5; % 水平方向标准差(米)
sigma_vertical = 1.5; % 垂直方向标准差(米)
sigma_azimuth = 0.8; % 方位角方向标准差(米)
完整代码下载链接:
https://download.youkuaiyun.com/download/callmeup/92494990
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











