




基于扩展卡尔曼滤波(EKF) 的多雷达目标跟踪仿真系统,实现了对二维平面内机动目标的实时状态估计。系统采用匀速运动模型(Constant Velocity Model),通过融合多个雷达的距离-方位角观测数据,实现对目标位置和速度的高精度跟踪。
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
运行结果
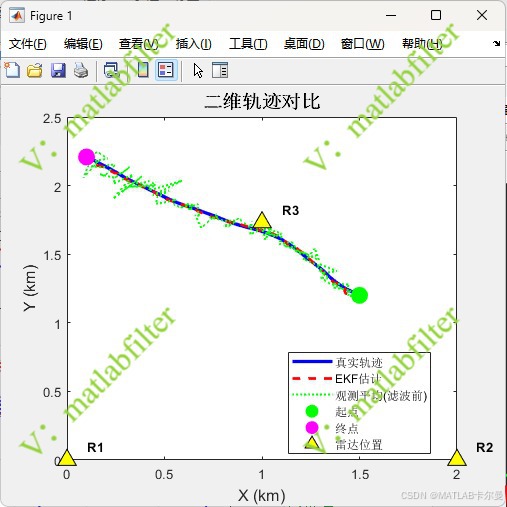
轨迹对比曲线:
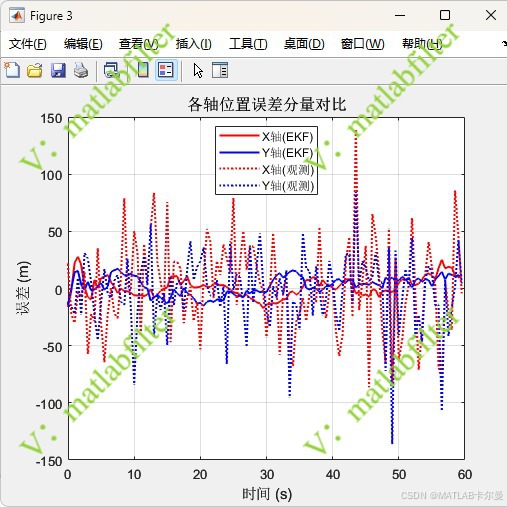
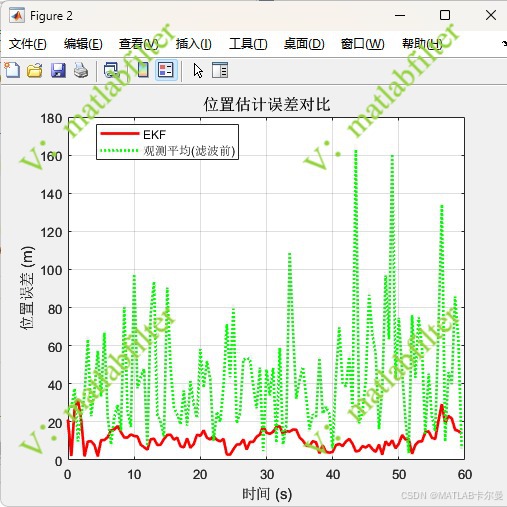
误差曲线:
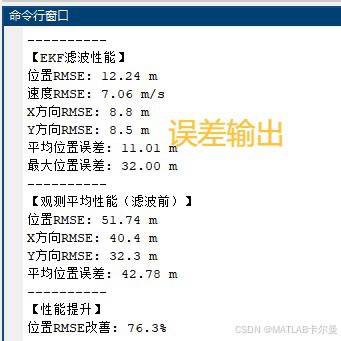
命令行输出的统计特性截图:
MATLAB源代码
完整代码如下:
% 3雷达二维目标跟踪滤波系统 - EKF实现,匀速运动模型
% 输入:雷达观测数据(距离、方位角),输出:目标状态估计(位置、速度)
% 作者: matlabfilter

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











