



本文所述代码用于对带噪声的圆形数据进行拟合,并比较代数法与非线性最小二乘法的效果。
代码先生成已知圆心与半径的测试点并加噪声,然后用线性方程组解法快速估计圆心与半径(代数法),再以此结果为初值,通过最小化点到圆的距离平方和(非线性法)获得更精确参数,最后绘制原始点与两种拟合圆进行对比。
运行结果
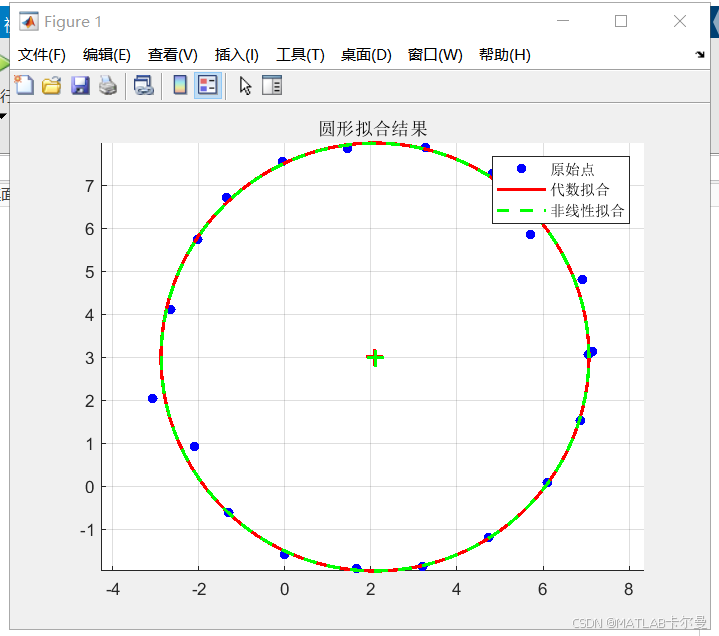
原始数据点与拟合后的圆形绘图示例:
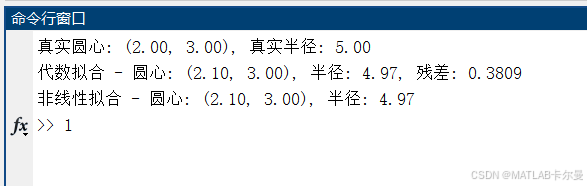
数据输出:
算法介绍
1. 功能概述
-
数据生成:首先构造一个已知圆心
(2,3)、半径5的圆形点集,并加入随机噪声。 -
拟合方法:
- 代数拟合法(线性法):通过解线性方程组快速估计圆心和半径。
- 非线性拟合法:以代数拟合结果为初值,利用
fmincon最小化点到圆的距离平方和,得到更精确结果。
-
结果对比:输出两种方法的圆心、半径以及残差。
-
可视化:绘制原始数据点、两种拟合圆及其圆心,比较拟合效果。
2. 核心公式
(1) 圆的方程
一个圆在二维平面上的标准方程为:
( x − x c ) 2 + ( y − y c ) 2 = r 2 (x - x_c)^2 + (y - y_c)^2 = r^2 (x−xc)2+(y−yc)2=r2
其中:
- ( x c , y c ) (x_c, y_c) (xc,yc) 为圆心坐标
- r r r 为半径
(2) 代数法推导
将圆方程展开:
x 2 + y 2 − 2 x c x − 2 y c y + ( x c 2 + y c 2 − r 2 ) = 0 x^2 + y^2 - 2x_c x - 2y_c y + (x_c^2 + y_c^2 - r^2) = 0 x2+y2−2xcx−2ycy+(xc2+yc2−r2)=0
设:
D = − 2 x c , E = − 2 y c , F = x c 2 + y c 2 − r 2 D = -2x_c,\quad E = -2y_c,\quad F = x_c^2 + y_c^2 - r^2 D=−2xc,E=−2yc,F=xc2+yc2−r2
则有:
x 2 + y 2 + D x + E y + F = 0 x^2 + y^2 + D x + E y + F = 0 x2+y2+Dx+Ey+F=0
p = A − 1 b p = A^{-1}b p=A−1b
进而得到半径:
r = c + x c 2 + y c 2 r = \sqrt{c + x_c^2 + y_c^2} r=c+xc2+yc2
(3) 非线性最小二乘法
目标是最小化点到圆的距离与半径差的平方和:
J ( x c , y c , r ) = ∑ i = 1 n ( ( x i − x c ) 2 + ( y i − y c ) 2 − r ) 2 J(x_c, y_c, r) = \sum_{i=1}^n \left( \sqrt{(x_i - x_c)^2 + (y_i - y_c)^2} - r \right)^2 J(xc,yc,r)=i=1∑n((xi−xc)2+(yi−yc)2−r)2
使用 fmincon 在半径
r
>
0
r > 0
r>0 的约束下进行优化。
MATLAB源代码
程序结构:

部分代码:
clc;clear;close all;
rng(0);
% 生成测试数据(带噪声的圆)
true_center = [2, 3];
true_radius = 5;
theta = linspace(0, 2*pi, 20);
noise = 0.1 * randn(size(theta));
x = true_center(1) + true_radius * cos(theta) + noise;
y = true_center(2) + true_radius * sin(theta) + noise;
% 方法一:代数拟合
[center1, radius1, residual1] = fitCircle(x, y);
% 方法二:非线性拟合
[center2, radius2] = fitCircleNonlinear(x, y);
% 显示结果
fprintf('真实圆心: (%.2f, %.2f), 真实半径: %.2f\n', true_center, true_radius);
fprintf('代数拟合 - 圆心: (%.2f, %.2f), 半径: %.2f, 残差: %.4f\n', center1, radius1, residual1);
fprintf('非线性拟合 - 圆心: (%.2f, %.2f), 半径: %.2f\n', center2, radius2);
完整的代码(包括原创函数)的下载链接:
https://download.youkuaiyun.com/download/callmeup/91632602
方法选择建议
一共提供了两种方法,各有优势,区别如下:
- 代数拟合(方法一):计算速度快,适合大多数情况,但在噪声较大时可能不够准确
- 非线性拟合(方法二):更准确,特别是在存在噪声的情况下,但计算量更大
- 如果数据噪声不大且需要快速处理,推荐使用方法一;
- 如果追求高精度,推荐使用方法二。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 3049
3049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











