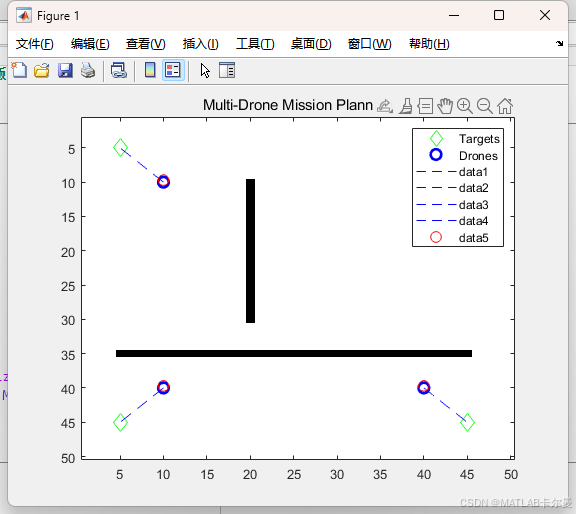
四旋翼多机协同任务规划Demo 文章目录 运行结果 MATLAB代码 修改提示 优先队列实现 保持兼容性 性能说明 运行方式 更多优化 运行结果 MATLAB代码 %% 四旋翼多机协同任务规划完整Demo(无classdef版本) clc; clear; close all; %% 初始化环境 mapSize = [50, 50]; map =</





 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






 订阅专栏 解锁全文
订阅专栏 解锁全文

























