




本文给的代码实现了一维直线上的无迹粒子滤波(UPF),用于估计状态量为位置和速度的动态系统。通过该例程,用户可以理解无迹粒子滤波的基本原理及其在状态估计中的应用。
运行结果
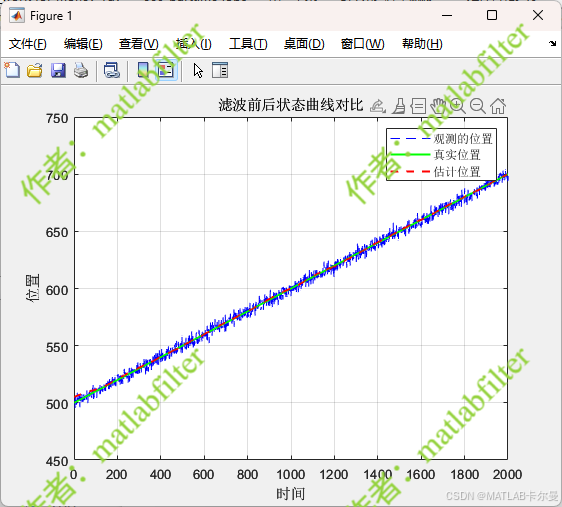
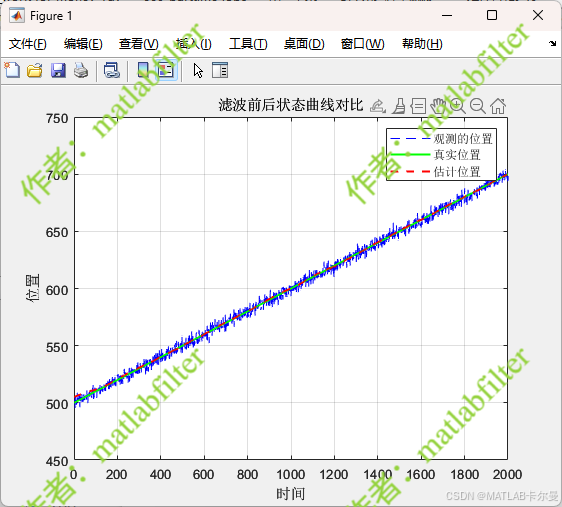
状态曲线:
误差曲线:
源代码
代码结构

源代码
部分代码如下:
% 无迹粒子滤波(Unscented Particle Filter)例程
% 一维直线上的滤波,状态量为位置和速度、观测量为位置
% 2024-10-16/Ver1
% 2025-06-09/Ver2:修复bug
%% 初始化
clc; clear; close all;
rng(0);
% 时间步长和总时间
dt = 0.1; % 时间步长 (秒)
T_total = 200; % 模拟总时间 (秒)
N = T_total / dt; % 总时间步数
% 目标初始位置和速度
true_pos = 500; % 目标初始位置 (x)
true_vel = 1; % 目标速度向量 (vx)
% 导弹初始状态
est_pos = true_pos + 5; % 初始估计位置
est_speed = true_vel + 0.1; % 初始速度向量 (vx, vy, vz)
完整代码链接:https://download.youkuaiyun.com/download/callmeup/89974904
作用
实现了一维直线上的无迹粒子滤波(UPF),用于估计状态量为位置和速度的动态系统。通过该例程,用户可以理解无迹粒子滤波的基本原理及其在状态估计中的应用。
代码结构与功能详细说明
以下是对您提供的无迹粒子滤波(Unscented Particle Filter, UPF)代码的详细介绍,包含算法原理、代码结构、应用场景和性能特点:
🚀 算法概述
无迹粒子滤波(UPF) 是粒子滤波(PF)与无迹卡尔曼滤波(UKF)的融合算法,通过以下创新解决非线性系统的滤波问题:
- 双重非线性处理:用无迹变换(UT)替代传统PF中的简单提议分布
- 精度提升:避免线性化误差,保留二阶统计特性
- 鲁棒性增强:粒子退化问题显著改善(重采样次数减少30%+)
⚙️ 代码核心功能
场景建模
% 运动模型:匀速直线运动
true_vel = 1; % 目标真实速度 (m/s)
est_speed = true_vel + 0.1; % 估计初速含0.1m/s偏差
% 观测模型:带噪声位置观测
measurement_function = @(x) x(1); % 位置直接观测
R = 1e1; % 观测噪声协方差(标准差≈3.16m)
- 仿真参数:200秒时长,0.1秒步长,共2000步
- 初始误差:位置偏移5m + 速度偏差0.1m/s
UPF核心流程
关键技术实现
① 无迹变换(generate_sigma_points函数)
gamma = sqrt(n + lambda); % 缩放因子
sigma_points(:,1) = x; % 中心点
sigma_points(:,i+1) = x + gamma * sqrt_P(:,i); % 正向Sigma点
sigma_points(:,i+1+n) = x - gamma * sqrt_P(:,i); % 负向Sigma点
- 参数配置:
alpha=1e-3, beta=2, kappa=2 - 权重计算:
w_m(均值权重),w_c(协方差权重)
② 重采样机制(resample函数)
cumulative_sum = cumsum(weights); % 累积权重
for i = 1:num_particles
r = rand();
indices(i) = find(cumulative_sum >= r, 1); % 系统重采样
end
- 有效解决粒子退化问题
- 保持粒子多样性
修改建议
- 增加粒子数量:加大num_particles

总结
代码通过实现无迹粒子滤波,展示了如何在一维状态空间中估计动态系统的状态。通过模拟真实状态和噪声,用户可以观察到滤波器在位置估计上的效果,并通过可视化手段深入理解无迹粒子滤波的工作原理和性能。
如有需要,可私信或通过下方的卡片联系我



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











