







 本文介绍了在姿态检测中互补滤波与卡尔曼滤波的应用。互补滤波通过结合陀螺仪与加速度计的数据,实现了短期精确度与长期稳定性的平衡。卡尔曼滤波则进一步提高了数据融合的效果,有效抑制了噪声干扰。
本文介绍了在姿态检测中互补滤波与卡尔曼滤波的应用。互补滤波通过结合陀螺仪与加速度计的数据,实现了短期精确度与长期稳定性的平衡。卡尔曼滤波则进一步提高了数据融合的效果,有效抑制了噪声干扰。
加速度计对四轴或小车的加速度比较敏感,取瞬时值计算倾角误差比较大;而陀螺仪积分得到的角度不受小车加速的的影响,但是随着时间的增加积分漂移和温度漂移带来的误差比较大,所以这两个传感器正好可以弥补相互的缺点。
所以这两个传感器正好可以弥补相互的缺点。互补滤波就是在短时间内采用陀螺仪得到的角度作为最优,定时对加速度采样来的角度进行取平均值来校正陀螺仪得到的角度。就是,短时间内用陀螺仪比较准确,以它为主;长时间用加速度计比较准确,这时候加大它的比重,这就是互补。
滤波体现在加速度计要滤掉高频信号,陀螺仪要滤掉低频信号,互补滤波就是根据传感器特性不同,通过不同的 滤波器(高通或低通,互补的),然后再相加得到整个频带的信号。例如,加速度计测倾角,其动态响应较慢,在高频时信号不可用,所以可通过高通滤波可抑制低频噪声。将两者结合,就将陀螺仪和加速度计的优点融合起来,得到在高频和低频都较好的信号。
互不滤波需要选择切换的频率点,即高通和低通的频率。
互不滤波法根据陀螺仪和加速度计的特性取长补短进行姿态解算,每过一段时间就让加速度计去校准陀螺仪。
互补滤波就是在短时间内采用陀螺仪得到的角度作为最优值,定时对加速度采样来的加速度值进行取平均值来矫正陀螺仪得到的角度。
存在这样的互补滤波:陀螺仪积分角度+=角速度*dt;融合角度=陀螺仪权值*陀螺仪积分角度+(1-陀螺仪权值)*加速度角度;
此外,还有最大梯度法
exInt = exInt + ex*Ki;
eyint = eyInt + ey*Ki;
ezInt = ezInt +ez*Ki;
陀螺仪积分角度 += 角速度 * dt;
角度偏差 = 加速度角度-陀螺仪积分角度;
知网
MPU9250传感器的姿态检测与数据融合
利用了mpu9250内部的陀螺仪、加速度计和电子罗盘,可以对三个轴的角速度、加速度、磁感应强度进行测量,利用优化的卡尔曼滤波算法对解算的姿态角度进行了融合处理,有效抑制噪声。
mpu9250集电路总线(IIC)传输速率可达400k Hz/s,串行外设接口(SPI)传输速率可达20MHz/s。陀螺仪的角速度测量范围最高达±2 000 (°) /s, 具有良好的动态响应特性。加速度计的测量范围最大为±16g (g为重力加速度) , 静态测量精度高。电子罗盘采用高灵敏度霍尔型传感器进行数据采集, 磁感应强度测量范围为±2000(°)/s,具有良好的动态响应特性。加速度计的测量范围最大为±16g(g为重力加速度),静态测量精度高。电子罗盘采用高灵敏度霍尔型传感器进行数据采集,磁感应强度测量范围为±4800uT,可用于对偏航角的辅助测量。
数据处理
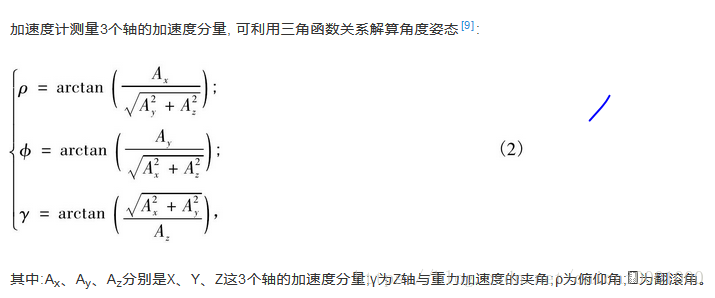
1、 陀螺仪测量的是旋转的角速度,通过积分可以得到对应的角度值。
![]()

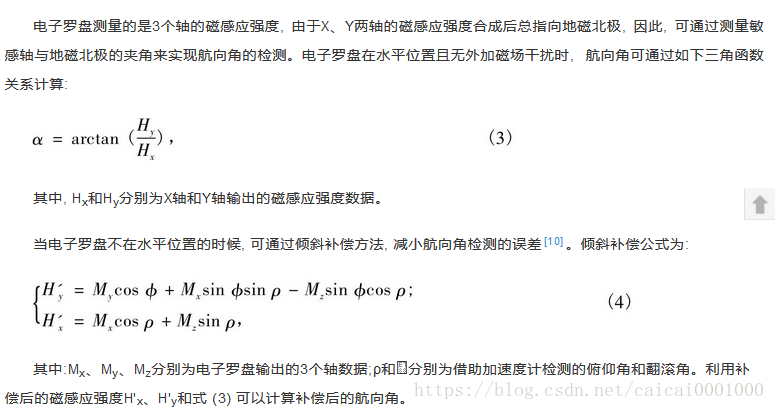
2、
3、
滤波算法
卡尔曼滤波
互补滤波动态融合精度低,响应速度没有卡尔曼滤波快。
卡尔曼滤波参考资料:

















 1450
1450

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









