







YB菜菜的毫米波雷达自学之路(四)——浅谈角度模糊
前提说明
对目标的角度位置的明确估计是解决DoA估计问题的另一个基本要求。角度不模糊是用来描述:雷达天线系统唯一区分由目标反射回来的信号的DoA的能力。而雷达角度模糊函数(Angle ambiguity function)的引入,从某种程度上来说,就是为了明确雷达的不模糊视角。
需要注意的是,利用模糊函数来确定雷达的不模糊视野以及角度方面的参数需要确定一个大前提:
(1)假定影响雷达空间合成波束的唯一影响因素仅仅由天线位置造成,即,无论是MIMO模式还是BF模式,每个天线的单独波束图相同。
(2)远场环境,即,目标相对于天线之间的距离远大于天线孔径。此时,目标回波束可以看成平行,信号的传播方向对阵列的每个元素都是一样的。
主要内容:
(1)首先阐述一维度雷达角度模糊函数定义以及不模糊区间解释。
(2)阐述二维平面阵列角度模糊函数定义,以及模糊函数图。
(3)对于二维平面阵列的角度模糊函数的不模糊区间的选择存在疑问,希望有哪位雷达大佬可以给我一些解答。
(4)关于模糊函数与波束方向图展开了一点点的探索,是否正确有待考证
1. 一维平面天线阵列模糊函数及相关阐述
1.1角度模糊函数定义
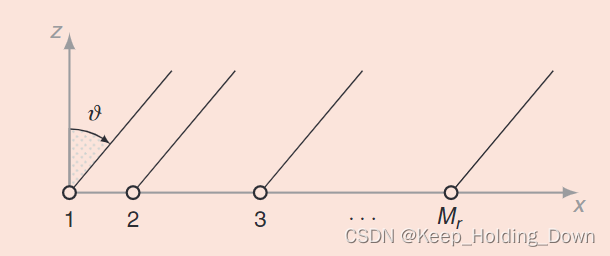
图1
图1展示了雷达一维天线阵列的布局(以接收角度),一个目标正处于相对于雷达中心的角度为 θ \theta θ的位置,并且有 M r M_{r} Mr个接收天线。
需要注意的是:
(1)若雷达处于BF工作模式,则 M r M_{r} Mr与实际接收天线数相同
(2)若雷达处于MIMO工作模式,则 M r M_{r} Mr与总的虚拟阵列数相同
根据之前章节学习的内容,我们可以知道每个天线接收的信号之间存在一个相位差,而这个相位差可以表示为:
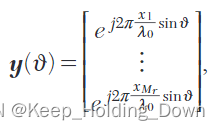
其中, x 1 = 0 x_{1}=0 x1=0, x r x_{r} xr表示其于天线相对于基准天线的距离差。
不熟悉的可以参考之前的笔记:
浅谈雷达信号模型建立2
则,在一维阵列中,雷达的角度模糊函数 χ \chi χ可表达为:
χ ( θ i , θ j ) = ∣ y ( θ i ) H y ( θ j ) ∣ ∣ ∣ y ( θ i ) ∣ ∣ ∣ ∣ y ( θ j ) ∣ ∣ ( 1 ) \chi(\theta_{i},\theta_{j})=\frac{|y(\theta_{i})^{H}y(\theta_{j})|}{||y(\theta_{i})||||y(\theta_{j})||} (1) χ(θi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









