







YB菜菜的毫米波雷达自学之路(一)——LFMCW雷达信号概述和信号模型初步建立
前提说明
迷迷糊糊学了一年多一点的毫米波雷达知识,各种东西都浅尝辄止。回过头来发现,自己只是记住了一些浅浅的结论,浮空建楼,甚是后悔。只有静下心来,回头重建。看成本人生豪迈,只不过是从头再来。
本次内容参考范围
TI官方视频中PPT
崔凡. 基于LFMCW毫米波雷达的目标参数估计[D].南京大学,2021.DOI:10.27235/d.cnki.gnjiu.2021.001809.
一、LFMCW雷达RADAR基本概念(概述)
(1)雷达RADAR:RAadio Detection And Ranging (无线电检测和测距)。
什么是雷达,就是利用无线电进行目标检测和测距 (检测到目标,发现目标,并能够知道目标的距离,速度,俯仰角,方位角)。这是雷达的核心也是雷达的使命, 也是我们使用雷达的最终目的。
(2)雷达频段

图1
目前比较常见的几种雷达波段(图1所示):24GHZ,77GHz~81GHz。从目前来看,已经把77GHz频段划分给车载雷达。因此,为了防止干扰,车辆检测雷达频率上调至80GHz左右。
(2)FMCW雷达——Chirp
LFMCW雷达:线性调频连续被雷达。雷达发射的频率随着时间线性变化,如图2所示。
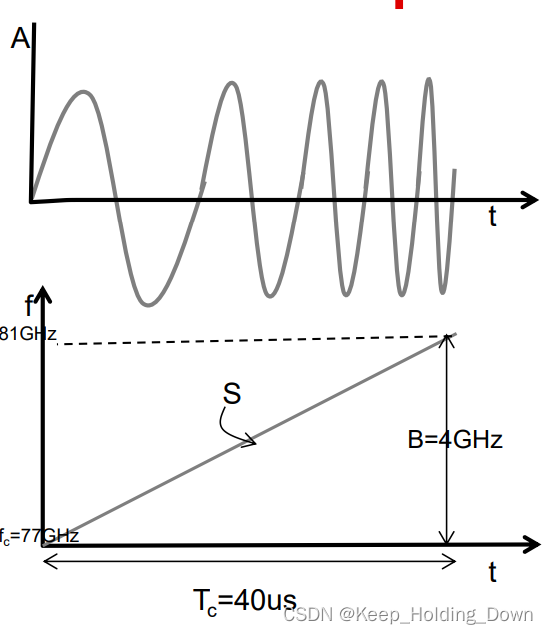
图2
其中
B(带宽):雷达发射的载波最大频率与最小频率之差
Tc:chirp上升周期。(注:通常用于计算速度分辨率/最大检测速度的TC是指chirp整周期 即:Tc=Chirp上升时间+Idle时间+chirp下降时间,如图3所示)
S(斜率)=B/Tc;
 图3
图3
注: 在实际中,我们要控制ADC的采样起始时间和chirp起始时间匹配,即ADC采样时间与chirp起始时间之间存在一个时间差(td)。而td由雷达检测距离R决定:若设计雷达检测最大距离为R,那么td=2*R/C。
(3)目标检测机里概述
雷达通过天线发射信号(TX),电磁波信号通过目标后反射回至雷达接收天线,接收信号与参考信号混频得到中频(IF)信号,对中频信号处理获得目标的距离、速度、角度(如图4所示)。
*通过对一个chirp内采样(快时间)获得目标距离信息;
*通过发射多个chirp获得目标速度;
*多个天线的数据处理获得目标角度。
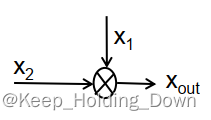
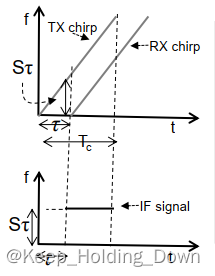
图4
(4)去斜处理器
由图4可知,在FMCW雷达中,混频部分采用的是”去斜处理器“。
去斜处理器又称为”有源相关“,用来处理极大带宽的LFM波形:雷达回波与发射信号的副本(参考信号)混频,然后通过低通滤波器和相干检波,形成中频信号。该信号经过数模转换后和匹配滤波可以获得与目标距离成正比的音频信号(如图5)。总的来说,去斜处理器可以有效的将时间延迟转成频率。

图5
二、基于LFMCW体制和去斜处理器的雷达信号模型建立
(1)(暂不涉及角度信息,仅对单发单收说明)
(2) 推导过程中忽略信号的幅度,因为幅度在每个接段都可以看成一个常数
2.1单Chirp信号构建与分析
2.1.1 首先构建发射信号(TX)

图6
如图6, α \alpha α为发射信号的强度,这里取1。即:
s t = s ( t ) = c o s ( 2 ∗ p i ∗ ( f o t + 1 2 k t 2 ) + ϕ 0 ) ( 1 ) s_{t}=s(t)=cos(2*pi*(f_{o}t+\frac{1}{2}kt^{2})+\phi_{0}) (1) st=s(t)=cos(2∗pi∗(fot+21kt2)+ϕ0)(1)
其中 ϕ 0 \phi_{0} ϕ0为初始相位,在不调相的情况下,可认为为0, f o f_{o} fo可认为是中心频率, k k k为Chirp波的斜率。
2.1.2 构建接收信号
若雷达电磁波发射至一个距离为R的目标上,并设电磁波在空中的传播时间为 τ ( t ) \tau(t) τ(t)。则雷达接收段的信号相对发射信号存在一个传播时间的延时,则接收天线端的信号表达式为(以实为例):
s r = s ( t − τ ) = e x p ( j ∗ 2 ∗ p i ∗ ( f o ( t − τ ( t ) ) + 1 2 k ( t − τ ( t ) ) 2 ) ) ( 2 ) s_{r}=s(t-\tau)=exp(j*2*pi*(f_{o}(t-\tau(t))+\frac{1}{2}k(t-\tau(t))^{2})) (2) sr=s(t−τ)=exp(j∗2∗pi∗(fo(t−τ(t))+21k(t−τ(t))2))(2)
2.1.3 参考信号
在去斜处理器中,参考信号与标准发射信号相同:
s t = s ( t ) = e x p ( j ∗ 2 ∗ p i ∗ ( f o t + 1 2 k t 2 ) ) ( 3 ) s_{t}=s(t)=exp(j*2*pi*(f_{o}t+\frac{1}{2}kt^{2})) (3) st=s(t)=exp(j∗2∗pi∗(fot+21kt2))(3)
2.1.4 混频
即接收信号与参考信号共轭相乘,并用滤波器去除高频。
s i f = e x p ( j ∗ 2 ∗ p i ∗ [ ( f o ( t − τ ( t ) ) − f o ( t ) ) + ( 1 2 k ( t − τ ( t ) ) 2 − 1 2 k t 2 ) ] ) s_{if}=exp(j*2*pi* [(f_{o}(t-\tau(t))- f_{o}(t))+(\frac{1}{2}k(t-\tau(t))^{2}-\frac{1}{2}kt^{2}) ]) sif=exp(j∗2∗pi∗[(fo(t−τ(t))−fo(t))+(21k(t−τ(t))2−21kt2)])
= e x p ( j ∗ 2 ∗ p i ∗ ( f o τ ( t ) + k t τ ( t ) − 1 2 k τ ( t ) 2 ) ) ( 4 ) =exp(j*2*pi*(f_{o}\tau(t)+kt\tau(t)- \frac{1}{2}k\tau(t)^{2} ) ) (4) =exp(j∗2∗pi∗(foτ(t)+ktτ(t)−21kτ(t)2))(4)
2.1.5 拍平信号获取以及目标信息之间的关系
假设一个目标与雷达的初始径向距离为 R R R,径向速度为 v v v,且原理雷达,则:
τ = 2 ∗ ( R + v t ) c ( 5 ) \tau=\frac{2*(R+vt)}{c} (5) τ=c2∗(R+vt)(5)
将(5)带入(4)中可得:
s i f = e x p ( j ∗ 2 ∗ p i ∗ ( f o ∗ ( 2 R + 2 v t ) C + k ( ( 2 R + 2 v t ) C ) ∗ t − 1 2 ∗ k ∗ ( R + v t ) 2 c 2 ) ) ( 6 ) s_{if}=exp(j*2*pi*( f_{o}*\frac{(2R+2vt)}{C}+k(\frac{(2R+2vt)}{C}) *t-\frac{1}{2}*k*\frac{(R+vt)^{2}}{c^{2}}))(6) sif=exp(j∗2∗pi∗(fo∗C(2R+2vt)+k(C(2R+2vt))∗t−21∗k∗c2(R+vt)2))(6)
忽略 1 / c 2 1/c^{2} 1/c2项,可得
s i f = e x p ( j ∗ 2 ∗ p i ∗ ( ( 2 k R c + 2 v f o c ) t + 2 ∗ k v c t 2 + 2 ∗ f o ∗ R c ) ) (
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3607
3607

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









