



 文章介绍了图像插值的不同方法,如最近邻内插、双线性内插和双三次内插,以及更复杂的小波变换在图像去噪和处理中的应用。此外,还讨论了图像边界定义、降噪策略和模糊集合的概念。重点讲述了几何空间变换,尤其是仿射变换,以及反向映射在图像配准中的重要性,强调了图像配准在修正几何畸变中的作用。
文章介绍了图像插值的不同方法,如最近邻内插、双线性内插和双三次内插,以及更复杂的小波变换在图像去噪和处理中的应用。此外,还讨论了图像边界定义、降噪策略和模糊集合的概念。重点讲述了几何空间变换,尤其是仿射变换,以及反向映射在图像配准中的重要性,强调了图像配准在修正几何畸变中的作用。
对图像的插值方法包括:
- 最近邻内插值:把原图像中最近邻的灰度赋给每个新位置。简单但是在某些直边缘严重失真。
- 双线性插:赋值公式为
 ,四个系数由(x,y)4个最近邻点解出。
,四个系数由(x,y)4个最近邻点解出。 - 双三次内插:赋值公式为

16个系数由(x,y)4个最近邻点解出。双三次内插在保持细节方面比双线性内插相对要好。
- 样条和小波:更复杂的插值,采用更多的邻点。小波在图像去噪,压缩,分割,融合方面有很重要的应用。小波变换处理图像的代码示例。
区域R的边界(外边界和内边界):
是指与R的补集中的点相邻的点的集合(一般根据8连通来定义)。为了保证边界是一个闭环回路,通常沿外边界确立边界。
求最大值的操作是非线性的。
降噪的方式:
对K幅不同的噪声图像取平均。或者用小波分析,噪声的分量很小,可以去掉。

遵循 和
和
相加其实就是连续积分的离散形式。在天问学中会使用CCD。
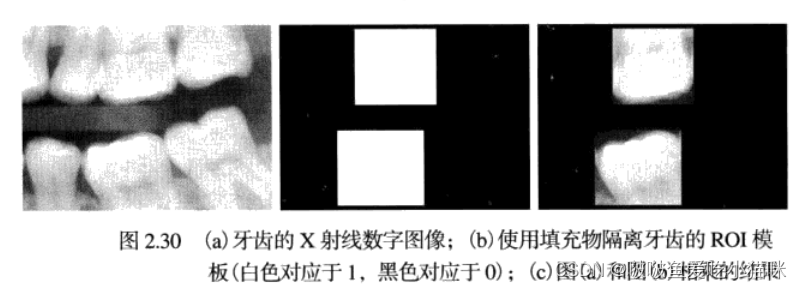
通过图像相减增强图像:
![]()

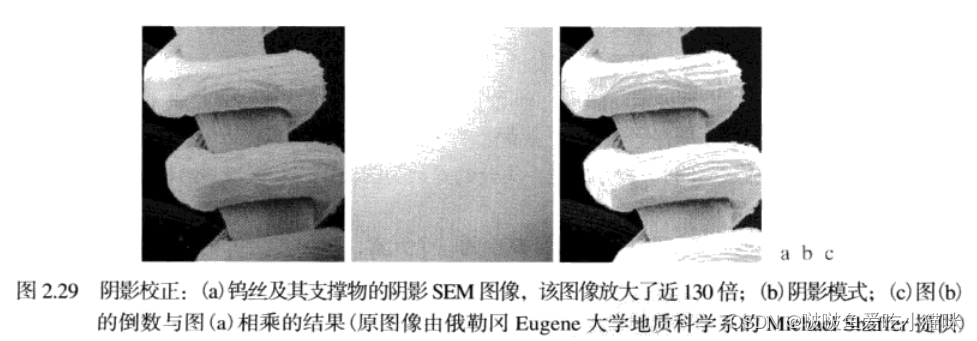
使用图像相乘和相除来矫正阴影:
模糊集合:
使用隶属度函数。可以实现在分类阈值点处的过渡。
空间操作:
直接在给定图像上的像素执行操作。分为三类
(1)单像素操作:
(2)邻域操作: 表示以点(x,y)为中心的一个邻域的坐标集。举个取平均值的例子:
表示以点(x,y)为中心的一个邻域的坐标集。举个取平均值的例子:

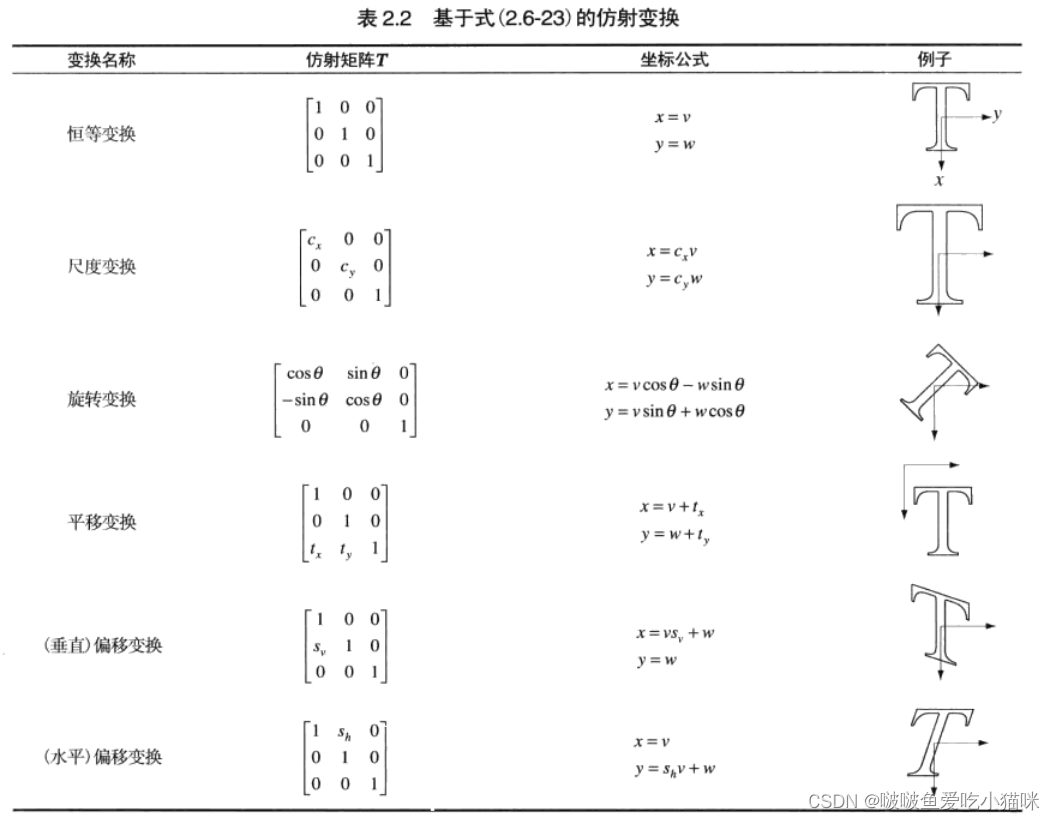
(3)几何空间变换和图像配准:几何变换改进图像中像素间的空间关系,所以又称为橡皮膜变换。几何空间变换由两个基本操作组成:坐标的空间变换和灰度内插。坐标变换如下
其中(v,w)是原来图像中像素的坐标,(x,y)是变换后图像中像素的坐标。常用的空间变换之一就是仿射变换,如下:

反向映射比前向映射更有效。前向映射就是根据原图用变换公式直接算出输出图像相应像素的空间位置。但存在多对一和空值。反向映射(Inverse Mapping):扫描输出图像的位置(x,y),通过 Image (为T的逆矩阵)计算输入图像对应的位置 (v,w),通过插值方法决定输出图像该位置的灰度值。
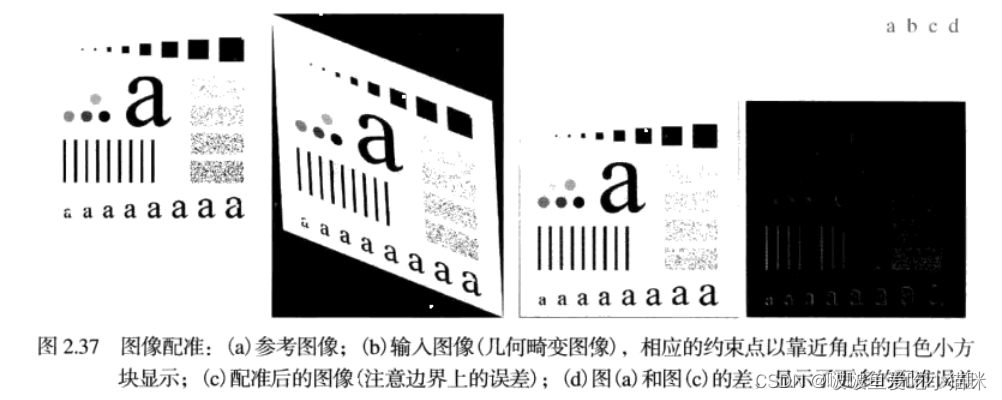
图像配准:
巧解图像处理经典难题之图像配准【图像处理】什么是图像配准?_图像配准方法_mjiansun的博客-优快云博客
是对齐两幅或多幅相同场景的图像。一般我们有输入图像和输出图像,但我们不知道变换函数,所以需要我们去估计变换函数,然后用它配准输入和输出两幅图像。一般应用在近似相同时间但不同成像系统获取的两幅或多幅图像,或者相同成像系统不同时间获取的图像,用来对观察视角,传感器分辨率,距离,方向,目标位置移动等因素导致的几何畸变进行修正。
图像配准的方法是使用控制点。假如在输入图像和参考图像中有一组4个控制点(已知的对应点),基于双线性近似的简单模型:


为了更精准可以选取更多的控制点,或者使用最小均方算法的拟合多项式等高级算法。
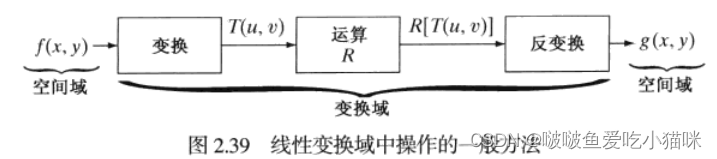
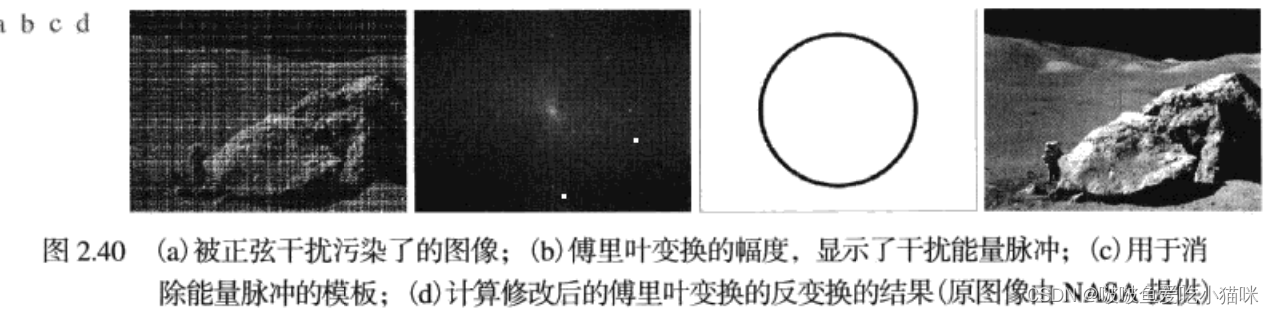
 图像处理方法不仅可以直接在图像的像素的进行操作,还可以通过变换图像从空间域转换到变换域,然后在变换域执行指定任务,最后再变换回空间域。
图像处理方法不仅可以直接在图像的像素的进行操作,还可以通过变换图像从空间域转换到变换域,然后在变换域执行指定任务,最后再变换回空间域。
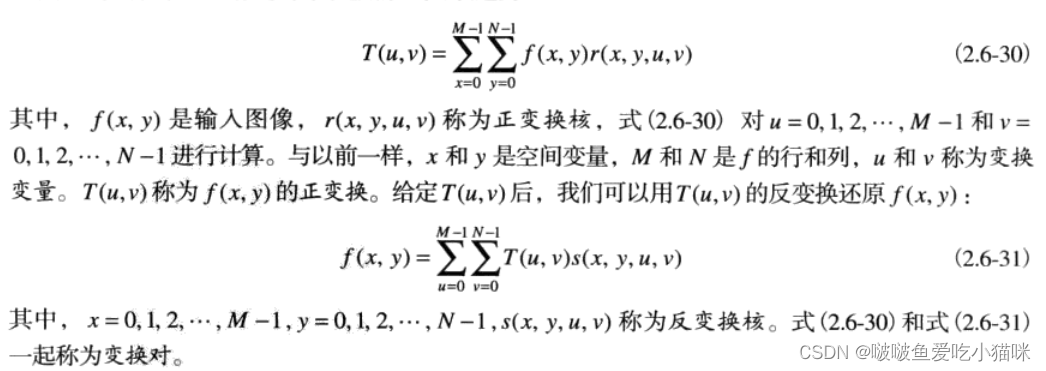
 的二维线性变换是一类重要的变换,通式为:
的二维线性变换是一类重要的变换,通式为:
 举个例子:
举个例子:
 一副图像灰度的均值为:
一副图像灰度的均值为:
灰度的方差为:



















 705
705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











