




 本文介绍了如何在Intel平台上利用OpenVINO工具包部署Yolov5目标检测算法,通过详细步骤展示了从安装OpenVINO到转换和运行Yolov5模型的过程,强调了IntelCPU在实时性方面的优势以及OpenVINO对NUC平台的支持。
本文介绍了如何在Intel平台上利用OpenVINO工具包部署Yolov5目标检测算法,通过详细步骤展示了从安装OpenVINO到转换和运行Yolov5模型的过程,强调了IntelCPU在实时性方面的优势以及OpenVINO对NUC平台的支持。

Intel CPU在运行视觉导航等算法时实时性要优于Nvidia等平台,如Jetson Tx2,NX。而Nvidia平台在运行深度学习算法方面具有很大优势,两种平台各有利弊。但是,Intel OpenVINO的推出允许NUC平台实时运行深度学习模型,如目前最流行的目标检测程序Yolov5,这样就太好了,仅使用Intel无人机平台就可以完成各种任务。本教程将教你用Prometheus在Intel无人机平台部署Yolov5目标检测。
先来个速度测试,仅使用Intel CPU,没有模型压缩与剪枝等算法,也不依赖其他任何加速硬件。

一、安装OpenVINO
官网教程:
https://docs.openvinotoolkit.org/latest/openvino_docs_install_guides_installing_openvino_linux.html
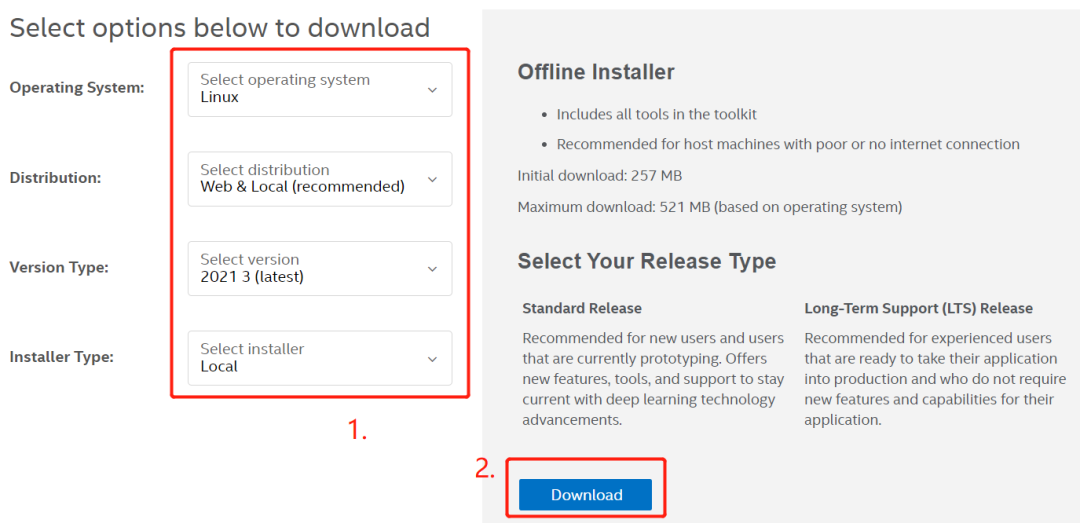
1. 下载安装包
地址:
https://software.intel.com/content/www/us/en/develop/tools/openvino-toolkit/download.html?operatingsystem=linux&distributions=webdownload&version=2021%203%20(latest)&options=offline
2. 如果之前安装过openvino,重命名或删除以下文件:
~/inference_engine_samples_build ~/openvino_models
3. 打开终端,解压安装包并进入解
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2513
2513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











