




相机模型
参考https://blog.youkuaiyun.com/Mapmost/article/details/137781706进行学习
我的博客源文件被我删掉了,更新不了了,气死我了。https://brightendavid.github.io/
前言
目的:将现实中世界坐标中的点(Xw,Yw,Zw)拍摄到相机中,获得图像坐标,这个坐标是以相机焦点为中心,相机焦距为到相机距离的一个虚拟平面;最后,将这个虚拟平面的坐标起始点移动到图像的左上角,得到了最后的像素坐标。
其中,最重要的知识涉及仿射变换和线性代数的相关知识,坐标系的变换可以说是线性代数的本质应用了。
仿射变换是一个神奇的东西,涉及到二维图像在三维中的变换,变平行四边形什么的

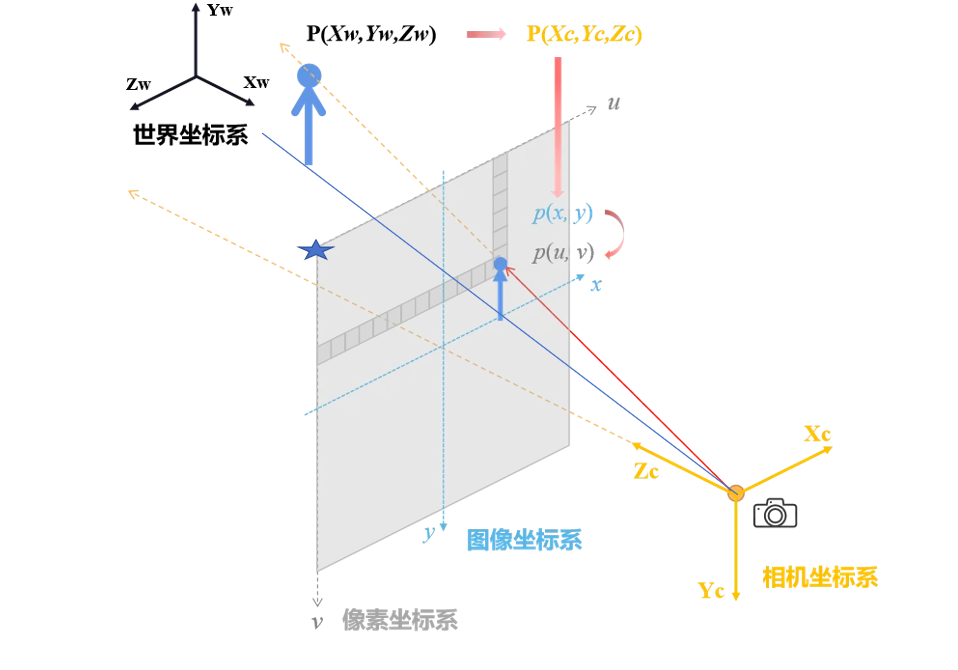
一、世界坐标=》相机坐标
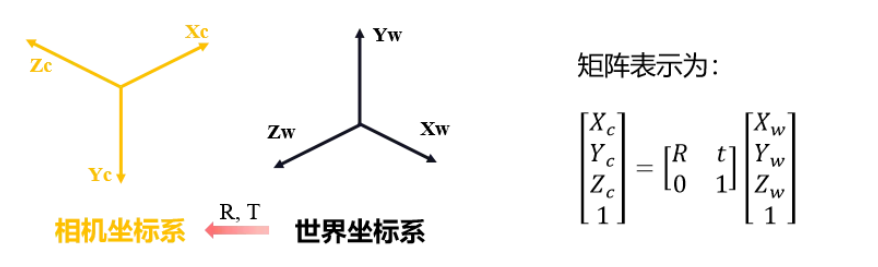
坐标中心是相机镜头,Z轴是距离相机的垂直距离。
最后的矩阵本质上是一个仿射变换,需要旋转矩阵R和平移矩阵T。
因为不能保证相机一定是和世界坐标垂直的,这和坐标建模有一定关系。
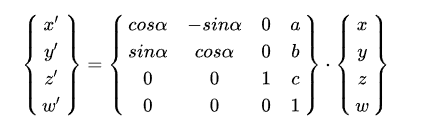
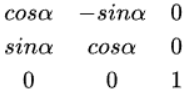
这是R,α表示旋转角度。
这是平移矩阵T。

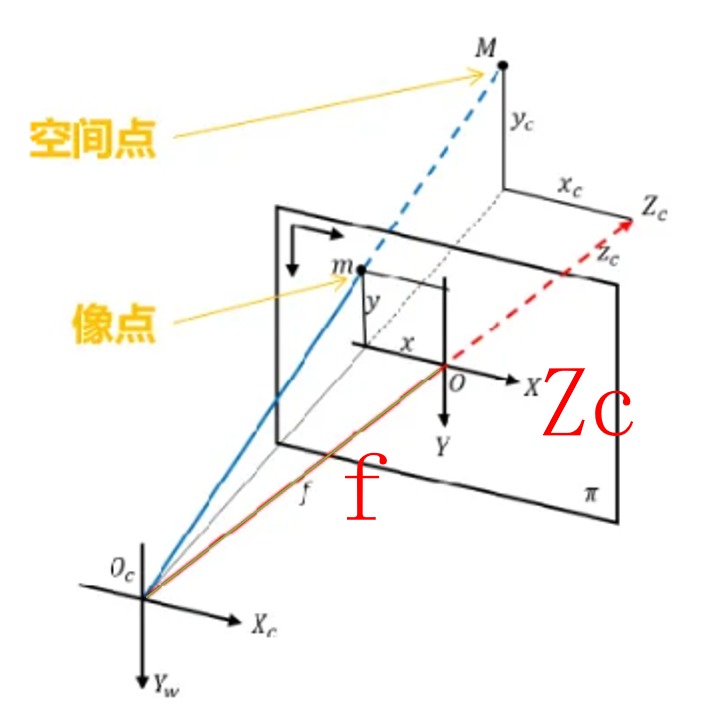
二、相机坐标=》图像坐标
总体就是先根据相似三角形做缩放,再做一个平移+旋转的仿射变换。
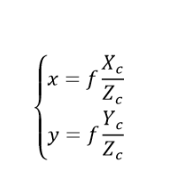
换一种写法就是
Xc / x = f / Zc
Yc / y = f / Zc
这个东西就是相似三角形对应量等比嘛,高比高,对边比对边。其中,f表示焦距;Zc表示物体的相机坐标。
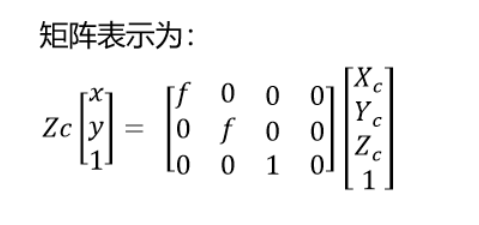
写成矩阵就是这样一个东西,Zc除过去就行了。
现在已经转为了π面的一个图像坐标系了。
三、图像坐标=》像素坐标
现在,需要把坐标原点O转移到图像坐标轴的原点,即图像的左上角。
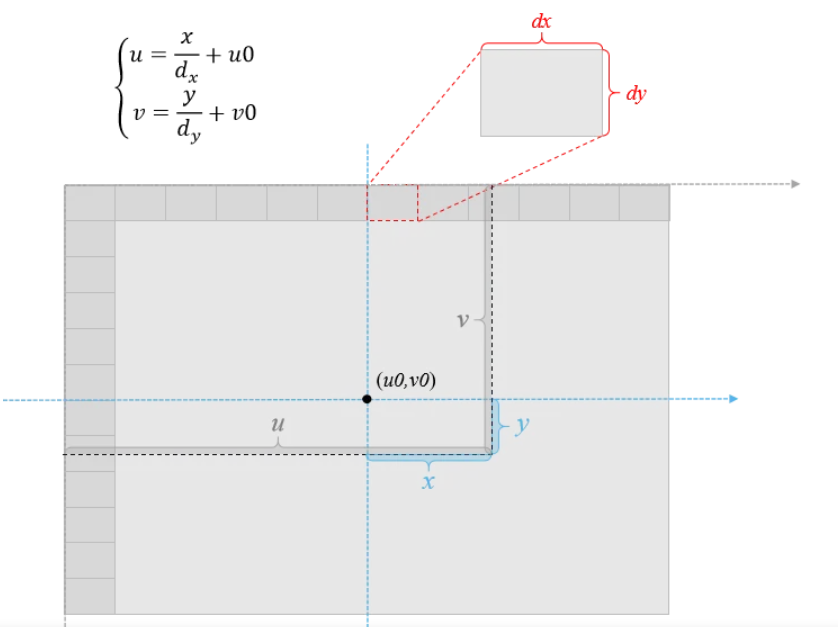
和第一步的原理相同,还是一个仿射变换就可完成了。
和第一步不同,因为涉及到**模拟信号到数字信号(不知道这种说法对不对)**的变换,还需要进行一个缩放变换。
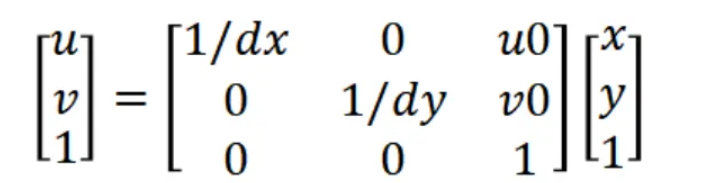
缩放的仿射矩阵
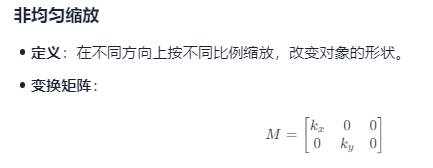
可以看到,这里是不需要做旋转变换的,或者说做变换就在矩阵上加一个负号。
在上述公式中,dx,dy可以理解为地图比例尺的概念。
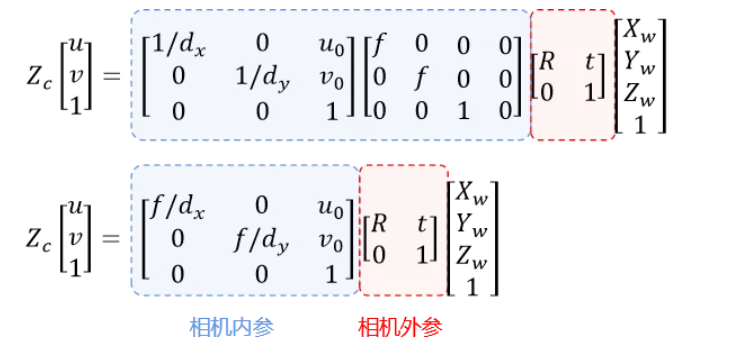
综上所述
最后就是把三个变换矩阵相乘。

















 35
35

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









