







现代无人机灯光系统已从装饰升级为关键人机交互接口——通过色彩编码传递飞行状态、故障诊断甚至空域标识信息
第一部分:WS2812核心技术解析
主要特点 ● IC控制电路与LED点光源共用一个电源。 ● 控制电路与RGB芯片集成在一个2020封装的元器件中,构成一个完整的外控像素点。● 内置信号整形电路,任何一个像素点收到信号后经过波形整形再输出,保证线路波形畸变不会累加。● 内置上电复位和掉电复位电路。 ● 每个像素点的三基色颜色可实现256级亮度显示,完成16777216种颜色的全真色彩显示。● 端口扫描频率2KHz。 ● 串行级联接口,能通过一根信号线完成数据的接收与解码。 ● 当刷新速率30帧/秒时,级联数不小于1024点。 ● 数据发送速度可达800Kbps。 ● 光的颜色高度一致,性价比高。
1.1 物理层工作原理
c
// WS2812数据时序示意图 (单位:ns) #define T0H 350 // 0码高电平时间 #define T1H 700 // 1码高电平时间 #define T0L 800 // 0码低电平时间 #define T1L 600 // 1码低电平时间 #define RES 50000 // 复位时间
关键特性:
-
24bit色彩深度(8bit/色)
-
800Kbps单线归零码
-
级联无刷新延迟
1.2 电气特性与无人机适配
| 参数 | 典型值 | 无人机环境要求 | 应对方案 |
|---|---|---|---|
| 工作电压 | 5V±10% | 4.2-5.2V波动 | 增加LDO稳压 |
| 单灯峰值电流 | 60mA | 限制总功耗 | PWM占空比控制 |
| 响应速度 | 400ns | 抗电磁干扰 | 双绞线+磁环 |
| 工作温度 | -25~+80℃ | -40~+65℃ | 硅胶灌封+热设计 |
1.3 协议逆向工程
使用逻辑分析仪捕获的信号解码:
[帧结构]
GRB顺序 | 绿灯(8bit) | 红灯(8bit) | 蓝灯(8bit)
[时序容差]
T0H: 350ns ±150ns
T1H: 700ns ±150ns
第二部分:嵌入式软件工程实践
2.1 状态机设计(State Machine)

2.2 UML类图设计
class WS2812_Controller {
- buffer: uint32_t[]
- length: uint16_t
+ init(GPIO_TypeDef*, uint16_t)
+ setPixel(uint16_t, uint8_t, uint8_t, uint8_t)
+ show()
- generateWaveform()
}
class FlightSystem {
- flightMode: uint8_t
+ updateStatus()
}
class LED_Behavior {
<<interface>>
+ onArming()
+ onError()
+ onGPSFix()
}
WS2812_Controller "1" *-- "1" LED_Driver
FlightSystem "1" -- "1" LED_Behavior
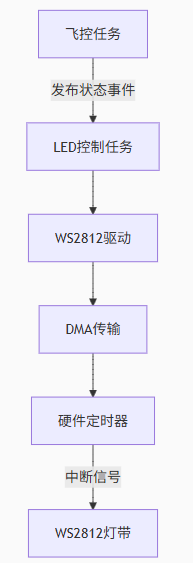
2.3 多任务协同泳道图
2.4 基于STM32H7的完整驱动
c
// ws2812_driver.h
#pragma once
#include "stm32h7xx_hal.h"
#define WS2812_NUM 24 // 无人机桨叶灯数量
#define WS2812_BPP 24 // 每像素位数
#define WS2812_RESET_DELAY 50 // 复位时间(us)
typedef struct {
TIM_HandleTypeDef *htim;
uint32_t channel;
DMA_HandleTypeDef *hdma;
uint32_t buffer[WS2812_NUM * WS2812_BPP + 50]; // 带安全余量
} WS2812_HandleTypeDef;
void WS2812_Init(WS2812_HandleTypeDef *hdev, TIM_HandleTypeDef *htim, uint32_t channel);
void WS2812_SetRGB(WS2812_HandleTypeDef *hdev, uint16_t index, uint8_t r, uint8_t g, uint8_t b);
void WS2812_Update(WS2812_HandleTypeDef *hdev);
// ws2812_driver.c
#include "ws2812_driver.h"
// PWM占空比映射:0码30% | 1码70%
#define WS2812_PWM_0 (htim->Init.Period * 0.3)
#define WS2812_PWM_1 (htim->Init.Period * 0.7)
void WS2812_Init(WS2812_HandleTypeDef *hdev, TIM_HandleTypeDef *htim, uint32_t channel) {
hdev->htim = htim;
hdev->channel = channel;
memset(hdev->buffer, 0, sizeof(hdev->buffer));
// 配置DMA到TIM的CCR寄存器
HAL_TIM_PWM_Start_DMA(hdev->htim, hdev->channel, (uint32_t*)hdev->buffer,
WS2812_NUM * WS2812_BPP);
}
void WS2812_SetRGB(WS2812_HandleTypeDef *hdev, uint16_t index, uint8_t r, uint8_t g, uint8_t b) {
uint32_t color = (g << 16) | (r << 8) | b; // WS2812 GRB顺序
uint32_t *buf = &hdev->buffer[index * WS2812_BPP];
for(int i=0; i<24; i++) {
*buf++ = (color & (1 << (23 - i))) ? WS2812_PWM_1 : WS2812_PWM_0;
}
}
void WS2812_Update(WS2812_HandleTypeDef *hdev) {
// 复位信号:50us低电平
uint32_t *buf = &hdev->buffer[WS2812_NUM * WS2812_BPP];
for(int i=0; i<50; i++) {
buf[i] = 0;
}
// 重启DMA传输
HAL_TIM_PWM_Stop_DMA(hdev->htim, hdev->channel);
HAL_TIM_PWM_Start_DMA(hdev->htim, hdev->channel, (uint32_t*)hdev->buffer,
WS2812_NUM * WS2812_BPP + 50);
}
第三部分:无人机整合关键技术
3.1 电磁兼容设计规范
| 干扰源 | 影响机制 | 解决方案 |
|---|---|---|
| 无刷电机 | 高频PWM噪声注入 | 独立电源隔离 + π型滤波器 |
| 2.4GHz图传 | 谐波干扰数据时序 | 双绞屏蔽线 + 铁氧体磁环 |
| GPS模块 | 接收灵敏度下降 | LED刷新避让1.575GHz频段 |
3.2 热管理策略
c
// 温度自适应亮度控制算法
float temp_compensation_factor = 1.0f;
void update_brightness(float temp) {
if(temp > 60.0f) {
temp_compensation_factor = 0.3f; // 高温降亮度
}
else if(temp < -10.0f) {
temp_compensation_factor = 1.5f; // 低温升亮度
}
else {
temp_compensation_factor = 1.0f;
}
}
3.3 飞行状态编码系统
c
typedef enum {
LED_MODE_BOOT = 0,
LED_MODE_ARMED,
LED_MODE_FLIGHT_NORMAL,
LED_MODE_LOW_BATTERY,
LED_MODE_CRITICAL_ERROR
} FlightMode;
void update_led_pattern(FlightMode mode) {
switch(mode) {
case LED_MODE_ARMED:
// 桨叶流光效果
for(int i=0; i<WS2812_NUM; i++) {
WS2812_SetRGB(&dev, i, 0, temp_compensation_factor*255, 0); // 绿色
}
break;
case LED_MODE_LOW_BATTERY:
// 呼吸红灯警报
float pulse = (sin(HAL_GetTick()/200.0f) + 1) * 0.5f;
for(int i=0; i<WS2812_NUM; i++) {
WS2812_SetRGB(&dev, i, temp_compensation_factor*pulse*255, 0, 0);
}
break;
// 其他模式实现...
}
WS2812_Update(&dev);
}
第四部分:高难度二次开发
4.1 基于RTOS的灯光动画引擎
c
// FreeRTOS任务设计
void led_animation_task(void *arg) {
WS2812_HandleTypeDef *dev = (WS2812_HandleTypeDef*)arg;
while(1) {
switch(current_animation) {
case ANIM_RAINBOW:
rainbow_effect(dev);
break;
case ANIM_RADAR:
radar_scan_effect(dev);
break;
case ANIM_BATTERY_INDICATOR:
battery_indicator(dev);
break;
}
vTaskDelay(pdMS_TO_TICKS(33)); // 30fps刷新
}
}
// 雷达扫描特效实现
void radar_scan_effect(WS2812_HandleTypeDef *dev) {
static float angle = 0.0f;
angle += 0.1f;
for(int i=0; i<WS2812_NUM; i++) {
float pos_angle = 2*M_PI * i / WS2812_NUM;
float diff = fabs(angle - pos_angle);
if(diff > M_PI) diff = 2*M_PI - diff;
float intensity = (diff < 0.5f) ? (0.5f - diff) : 0;
WS2812_SetRGB(dev, i, 0, 0, intensity*255);
}
WS2812_Update(dev);
}
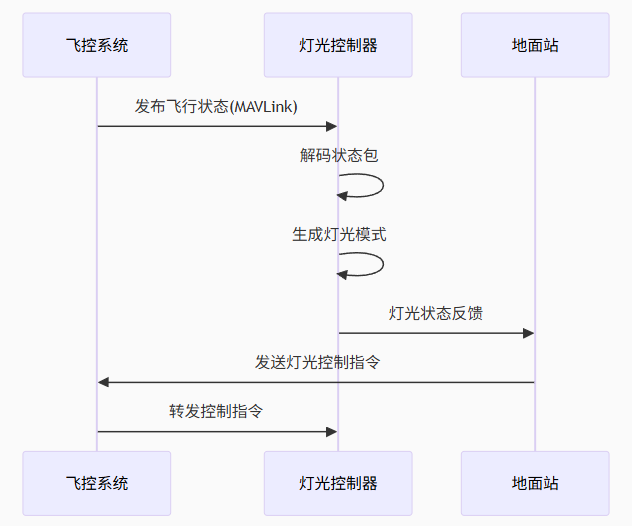
4.2 灯光-飞行数据联动系统
4.3 视觉辅助定位系统
python
# OpenCV灯光定位示例(Python伪代码)
def detect_drone(frame):
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 根据无人机预设颜色阈值检测
mask = cv2.inRange(hsv, (60, 100, 100), (80, 255, 255)) # 绿色灯光
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
x,y,w,h = cv2.boundingRect(cnt)
if w*h > MIN_AREA: # 过滤噪声
cv2.rectangle(frame, (x,y), (x+w,y+h), (0,255,0), 2)
return (x+w/2, y+h/2) # 返回中心坐标
return None
第五部分:工程化部署规范
5.1 线缆敷设标准
| 参数 | 工业级标准 | 消费级标准 |
|---|---|---|
| 线径 | AWG26屏蔽双绞线 | AWG28非屏蔽线 |
| 连接器 | JST-GH耐振动 | 普通排针 |
| 弯曲半径 | >15倍线径 | >10倍线径 |
| 固定间距 | 每50mm扎带固定 | 仅端点固定 |
5.2 环境耐久性测试
c
// 振动测试剖面 (符合MIL-STD-810G)
const VibrationProfile drone_vibe_test = {
.axes = XYZ三轴,
.sweep_rate = 1.0, // 扫频速率(oct/min)
.frequency_range = {10, 2000}, // 频率范围(Hz)
.psd_level = 0.04 // 功率谱密度(g²/Hz)
};
// 温度循环测试
const TempCycle test_cycles[] = {
{-40, 2}, // -40℃保温2h
{+25, 0.5}, // 25℃过渡0.5h
{+85, 2}, // 85℃保温2h
{+25, 0.5} // 回常温
};
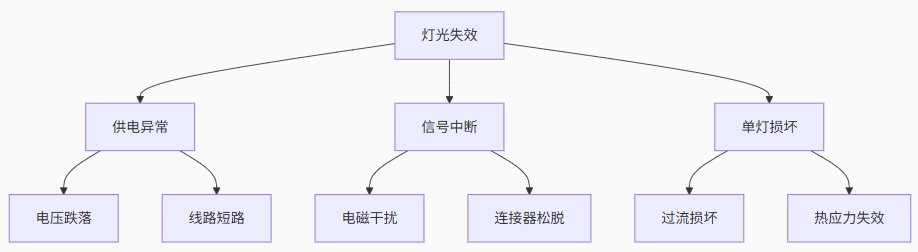
5.3 故障树分析(FTA)
第六部分:未来扩展方向
6.1 激光通信辅助系统
c
// 基于WS2812的可见光通信调制
void vlhc_send_byte(uint8_t data) {
for(int bit=0; bit<8; bit++) {
bool bit_val = data & (1 << (7-bit));
// 用全白/全黑表示比特
if(bit_val) {
fill_all(255,255,255); // 白
} else {
fill_all(0,0,0); // 黑
}
WS2812_Update(&dev);
delay_us(100); // 100μs/bit => 10kbps
}
}
6.2 自组织灯光网络
python
# 分布式灯光协调算法
class DroneLEDNetwork:
def __init__(self, drones):
self.drones = drones
def synchronize_pattern(self):
# 选举主节点
master = min(self.drones, key=lambda d: d.id)
# 广播模式参数
master.broadcast({
'pattern': 'pulse_wave',
'color': [0,0,255],
'frequency': 1.0
})
def update(self):
for drone in self.drones:
drone.render_pattern()
附录:关键问题速查表
| 故障现象 | 根本原因 | 解决措施 |
|---|---|---|
| 末端灯珠颜色异常 | 信号反射 | 末端并联330Ω电阻 |
| 全灯带随机闪烁 | 电源地线回路 | 单点接地+星型拓扑 |
| 高温下颜色失真 | 半导体温漂 | 启用温度补偿算法 |
| 电机启动时失控 | 电压跌落 | 增加大容量钽电容(1000μF) |
| 远距离控制失效 | 阻抗不匹配 | 信号线串联100Ω电阻 |



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









