



基于虹膜运动的轮椅控制使用树莓派
1. 引言
随着人口增加,易患四肢瘫痪的人数迅速上升。目前已为残疾人开发了多种轮椅系统。以下将讨论迄今为止存在的一些轮椅系统。基于手势的轮椅系统 [2] 使用附着在手上的MEMS加速度传感器,然后根据手势控制轮椅系统。语音操作轮椅系统 [5] 使用用户的声音来操作轮椅。基于头部和手指的自动轮椅系统 [1] 使用加速度计和弯曲传感器来操作轮椅。但上述所有系统都需要较大的人为努力,且均无法帮助四肢瘫痪患者 [3–4]。
在四肢瘫痪情况下,瘫痪程度极为严重,患者只能移动眼睛。为了帮助这类残障人士,基于眼动并使用MATLAB的电子轮椅系统 [6]应运而生。头戴式摄像头检测眼球运动,并相应地移动轮椅。头戴式摄像头连接到笔记本电脑,由持续运行的MATLAB脚本处理图像,并向微控制器发出指令以控制轮椅 [7–8] 的车轮。该系统为这类人群带来了福音。但其局限在于必须随身携带笔记本电脑,与轮椅系统一同使用,显得笨重且成本高昂。
为了消除基于眼动的电子轮椅系统使用MATLAB所带来的笨重和高成本问题,人们提出了使用树莓派来控制整个轮椅系统。由于树莓派拥有自己的操作系统且便于携带,因此人们转向采用基于树莓派的轮椅系统 [9–15]。然而,在现有的基于树莓派的轮椅系统中,延迟(响应延迟)是最严重的问题。
因此,我们提出了一种系统,该系统采用高效的图像处理算法,利用OpenCV并尽可能降低延迟。OpenCV对眼睛进行处理,并通过应用两种算法(质心和阈值)来启动轮椅的运动。使用 Python对树莓派[10]进行编程。当通过电源备份(即移动电源)为树莓派供电时,使用Shell 脚本持续运行相同的过程。
2. 文献综述
| 序号 | 各种类型的轮椅 | 技术 | 缺点 |
|---|---|---|---|
| 1. | 基于手势的轮椅运动 [2][11] | - | 需要人力来操控设备,这对于有身体畸形的人来说使用起来很困难。 |
| 2. | 声控轮椅 [5] | - | 在背景噪音环境下;背景噪音;说话人差异;说话风格;语速。 |
| 3. | 基于头部和手指的自动化轮椅 [1] | - | 这对用户来说成了一种负担;准确性问题。 |
| 4. | 基于眼球运动的电子使用轮椅系统 MATLAB [6][12][13] | - | 您必须随身携带笔记本电脑每次使用轮椅时。这是繁琐且昂贵。 |
| 5. | 基于眼球运动的电子使用轮椅系统 树莓派 [16][17] | - | 检测眼睛时延迟较高运动和树莓派响应。 |
3. 方法论
3.1. 虹膜检测
为简便起见,我们在轮椅的把手部分安装了一个红外网络摄像头,用于检测眼部运动。然后我们设计了一种算法,利用质心计算方法在OpenCV中实现对眼睛的虹膜部分的跟踪。一旦虹膜被跟踪,便设置阈值。
3.2. 阈值
运动检测采用了一个非常基本的原理。将双眼的特征点作为参考,通过比较当前快照和前一张快照中眼睛位置的像素值差值来计算眼睛位置的变化。
有效尝试的最小眼睛运动被视为阈值。通过评估差值,如果在左或右任一方向上的差值超过阈值,则设置相应标志位。如果差值小于阈值,则无需移动。有时由于非线性会导致检测失败。在此类情况下,可对上一次快照中检测到的眼睛施加偏置。
3.3. 驾驶轮椅
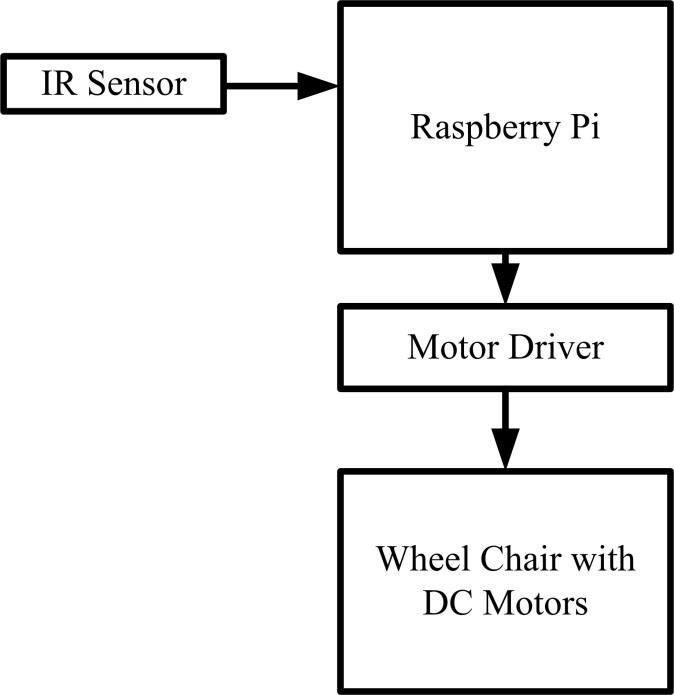
下图是框图的图示表示。
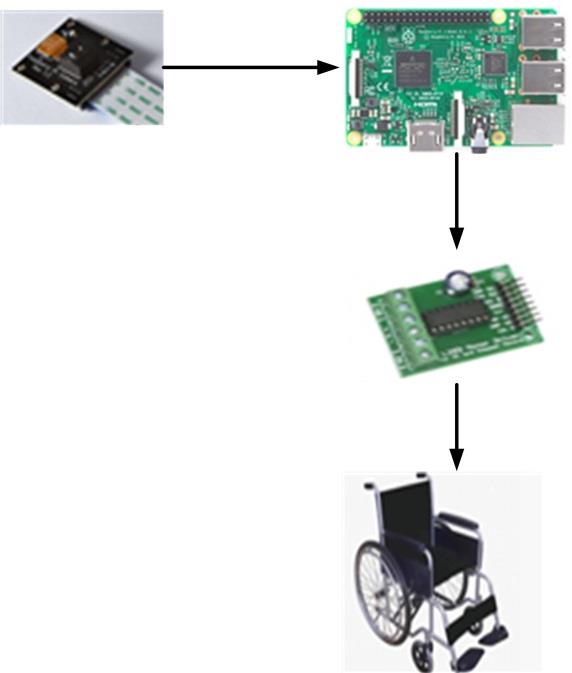
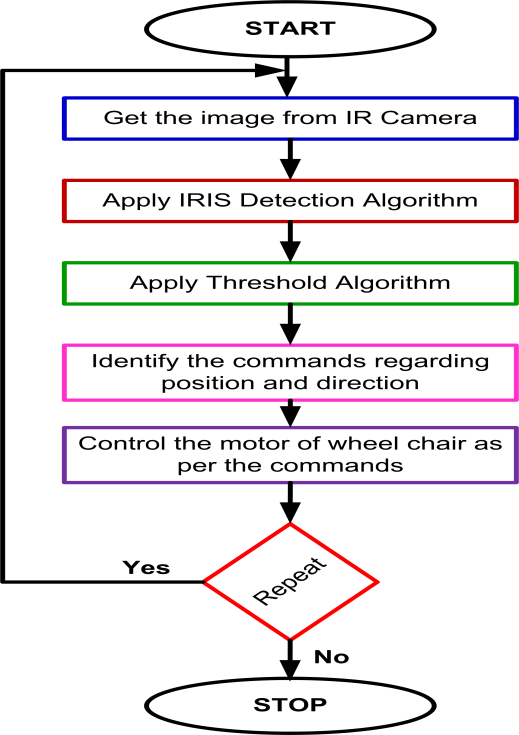
该方法包含一个已安装OpenCV的树莓派。红外相机与树莓派连接,用于捕捉人眼的实时图像,并将其发送给持续运行的OpenCV Python脚本。OpenCV Python脚本使用虹膜检测算法(质心算法)和阈值算法处理图像。随后,树莓派根据轮椅需要移动的位置和方向,向电机驱动电路发出指令。
方法论的流程图如下所示。
3.4. 质心算法
对每一帧图像进行图像处理。在每幅图像中,使用传统的Viola‐Jones算法检测眼睛。但为了跟踪虹膜,我们提出了使用质心算法的想法。已有多种方法用于跟踪眼球运动,但这些方法在低分辨率、低对比度或遮挡等困难情况下往往无法准确估计眼睛中心。我们的方法对尺度、姿态、对比度以及光照变化具有不变性。该方法还在很大程度上降低了延迟(树莓派的响应时间)。
它所做的就是从图像中裁剪出眼睛部分。我们将图像转换为灰度图像,然后再转换为二值图像。在二值图像中,黑色代表零,白色代表一。因此,我们沿x轴和y轴遍历图像,每当找到零(黑色区域)时,就将这些值组成一个集合,并对它们求平均值以得到质心点。
下图重现了相同的情况。

3.5. 阈值算法
首先确定所捕获图像的长度。沿该长度通过数学方法进行两次划分,如下面所示的图示。右侧的划分为右阈值,左侧的划分为左阈值。如果质心位置位于这两个划分之间,则运动方向应为直行。如果质心位置大于右阈值,则启动右方向运动。如果质心位置小于左阈值,则启动左方向运动。

| 表1. 基于虹膜的轮椅控制。 |
|---|
| 眼睛运动 轮椅运动方向 |
| UP 直行 |
| Right Right |
| Left Left |
| Down Stop |
(a) 向上方向 (b) 向下方向
(c) 向右方向 (d) 向左方向

4. 结论
树莓派是现代世界中可用的最新技术之一。但树莓派的特别之处在于它拥有自己的操作系统,从而减少了人体上的电路装置,成本也比其他系统大幅降低。因此,这种方法对残疾人而言是一项福音。我们已使该系统具备很高的精确度,并通过使用质心与阈值算法显著降低了延迟。我们的目标是让残疾人重新获得自力更生的能力。

















 42
42

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









